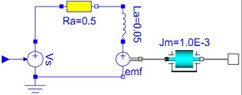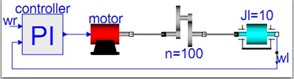
Figure 1 Schematic picture of a motor drive.
History, simulation, modeling, differential equations
differential-algebraic equations, object-orientation.
Modeling and simulation have experienced an amazing
development since its beginning in the 1920s. At that
time, the technology was available only at a handful
of university groups. Today it is available on the desk
of all engineer who needs it. The paper presents the
current status of modeling and simulation. It draws
on the historical perspective to explain how the field
has developed. Particular emphasis is given to shifts in
technology and paradigms.
.
Modeling and simulation are indispensable when deal-
ing with complex engineering systems. It makes it possi-
ble to do essential assessment before systems are built,
it can alleviate the need for expensive experiments and
it can provide support in all stages of a project from con-
ceptual design, through commissioning and operations.
The following quote from one of the early pioneers Prof.
Vannevar Bush, who worked on problems in power sys-
tems, is still highly relevant:
“Engineering can proceed no faster than
the mathematical analysis on which it is
based. Formal mathematics is frequently in-
adequate for numerous problems pressing
for solution, and in the absence of radically
new mathematics, a mechanical solution of-
fers the most promising and powerful attack
wherever a solution in graphical form is ad-
equate for the purpose. This is usually the
case in engineering problems.”
Technology has naturally been an important factor
in the development of simulation. Analog techniques
were predominant from 1920 to 1950. Major changes
took place when digital computers were available and
simulation techniques have then exploited the advances
in digital computers and software techniques such as
computer graphics.
There is a large literature on simulation in wide range of
engineering journals. Early developments are described in Brennan and Linebarger H1964I and Tiechroew
et al. H1967I. More recent overviews found in the
books Kreutzer H1986I,Kheir H1988I, Cellier H1991I and
Linkens H1993I and the survey papers Otter and Cel-
lier H1995I, Cellier et al. H1995I and Marquardt H1996I
Lists of software are published yearly by the Society for
Computer Simulation.
In this paper we will essentially follow the historical de-
velopment. We will start with analog techniques which
were based on ordinary differential equations and block
diagrams. A family of digital simulators which have in
herited many of the properties of analog computing are
then treated. The advantages and the limitations of the
analog heritage are discussed. Domain oriented specia
purpose simulators are then described. This is a nat
ural way to discuss issues such as efficiency and user
friendlyness. Then we will discuss a new generation of
simulators which are based on object oriented modeling
They cover multiple domains and permit multiple views
of the system. They also have efficient ways to deal with
decomposition and aggregation.
.
The first simulators were analog. The idea is to model a
system in terms of ordinary differential equations and
then make a physical device that obeys the equations.
The physical system is initialized with proper initial
values and its development over time then mimics the
differential equation.
Simulation of an ordinary differential equation HODEI
dx/dt=f(t, x)
can be accomplished by integrators and function gen-
eration. It was actually shown by Kolmogorov H1957I
that continuous functions of several variables could be
approximated by combinations of scalar products and
generation of scalar functions. This idea was used for
function generation in early analog simulation although
itwasnotknownatthetimethatthemethodwasgen-
erally applicable.
The mechanical differential analyzer developed by Van-
nevar Bush at MIT was the first general purpose tool
to simulate dynamical systems JBush H1931IK. Variables
were represented by angles. Integration was performed
by the ball and disc integrator, which had been used
.