г. Донецк,ДАТА, 2011 г.
А.А.Альемраят, студент 5-го курса;Руководитель:Толочко.О.И.
Донецкий национальный технический университет
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ И АВТОМАТИЗАЦИЯ. ЭНЕРГЕТИКА И ЭНЕРГОРЕСУРСОСБЕРЕЖЕНИЕ. ДИАГНОСТИКА В ЭЛЕКТРОМЕХАНИЧЕСКИХ И ЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ. МОДЕЛИРОВАНИЕ И МЕТОДЫ ОПТИМИЗАЦИИ
параметрами в статических и динамических режимах работы при нагреве машины, изменениях насыщения магнитопровода и вытеснении тока. При создании АЭП СЭМ, соответствующих повышенным требованиям к точности, глубине и плавности регулирования, неприемлемым оказывается применение методов анализа и синтеза, применяемых в линейной теории управления. Решение задачи синтеза АУ для ОУ с нестационарными свойствами и функционирующих в условиях действия возмущающих воздействий, может быть осуществлено при построении СУ в классе нелинейных систем, работающих в скользящем режиме (СР).
За последние годы разработано множество вариантов систем ВПУ различной сложности, отличающихся применяемыми АУ, ОКБ по векторам потокосцеплений ЧАо статора, ротора или воздушного зазора ( А = s, m или r), составом СУ и их информационно - датчикових структур (ИДС). Использование различных вариантов ОКБ, выбираемых прежде из соображений удобства измерения вычисления ЧАо , упрощения технической реализации АЭП с ВПУ и снижения чувствительности СУ к изменениям параметров АД в последнее время превращается в инструмент оптимизации таких технико-экономических показателей АЭП, как перегрузочная способность по моменту, жесткость характеристик, К.П.Д., степень использования магнитных материалов и габаритной мощности.
Применение СЭМ механизмов ТВСД,
осуществляющих сложные циклически
повторяющиеся движения в робототехнике, металлообработке и текстильной промышленности, позволяет обеспечить выполнение характерных для таких механизмов требований оптимизации показателей в статических и в динамических режимах работы путем изменений ОКБ в соответствии с их программным чередованием. Синтез АУ выполним по методике [1], основанной на концепции А.М.Ляпунова об устойчивости возмущенного движения. В соответствии с этой методикой формулируется, а затем с применением вариационных методов решается задача аналитического конструирования оптимальных регуляторов, обеспечивающих минимум интегральных квадратичных отклонений траекторий движения от траекторий, заданных программно.
ИДС системы составляют ДФТ, датчик частоты вращения ДС и наблюдатель координат пото-косцепления НК. В соответствии с пинципом ВПУ, амплитуда, частота и фаза задающих воздействий i*sABc на входах КФФТ относительно полученных в НК сигналов cos 0То, sin 0То пространственного положения ориентирующего вектора ^оА,
КРМ ПИ ПК2 КФФТ

формируется ПК1, ПК2 по сигналам на выходах РРТ и РАТ в сооветствии с целью управления формирования М(Т). На рис.1 представлена функциональная схема системы ВПУ АЭП с АУ (2), в состав которой входят: контуры регулирования координат механического движения КРМ и потокосцепления КРП; модель контура тока МКТ; преобразователи координат ПК1 ^ 4; КФФТ, состоящий из релейных регуляторов токов РФТ, блока логики БЛ, СТП, датчиков токов ДФТ.
Контуры КРМ и КРП содержат релейные
регуляторы скорости РС, потокосцепления РП,
активного РАТ и реактивного РРТ тока.
Выполнение этих регуляторов релейными приводит
к следующим особенностям формирования isABc.
При отсутствии СР работы РРТ и РАТ сигналы
i*sABC синусоидальны или знакопостоянны, а КФФТ
функционирует в устойчивом СР. Амплитуда
пульсаций тока, интервал частот СР однозначно
предопределяются выбором ширины петли
гистерезиса Арт , величин кф, Тэ и могут быть
оптимизированы. При вхождении РАТ и РРТ в СР
КФФТ переходит в режим переключений. РФТ
размыкаются т.к. сигналы i*sABC при этом
представляют собой фрагменты опорных синусоид
со сдвигами ± 90, -180 эл. град. скачкообразно
чередующимися в соответствии со сложными
комбинациями частот СР РАТ, РРТ и нередко
сопровождающимися биениями. Это приводит к
значительному увеличению пульсаций
формируемых токов выше значений, заданных гистерезисом Арт.
Для устранения этих недостатков, обеспечения стабильности частот СР КФФТ и возможности применения алгоритмов как двух-, так и однополярной модуляции в схеме СУ предусмотрено выделение сигналов "эквивалентного
управления" V и U, осуществляемое моделью
токового контура МТК с настроечными параметрами
реального АЭП. Сигналы V и U на выходах МТК не
содержат высокочастотных разрывов и
представляют собой сигналы непрерывного управления в функции координат ОУ. При отработке КФФТ, эти сигналы обеспечивают характер движений ОУ и желаемые свойства СУ, как и исходные сигналы разрывных управлений РАТ и РРТ по которым вычисляется эквивалентное управление. В состав МТК введены переключатели с логическим управлением от датчиков СР, переключающие вместо сигналов РАТ и РРТ на входы ПК1 сигналы V и U только в случае перехода указанных регуляторов в СР.
Практическая реализация систем ВПУ АД АУ (2), переход от единичных разработок к широкому внедрению комплектных электроприводов ограничены трудностью получения информации о параметрах поля и электромагнитного момента. Точность, полнота и достоверность такой информации, совместно с рациональным выбором законов управления, ОКБ и состава ИДС, предопределяют эффективность применяемых алгоритмов, структур и сложность технической реализации АЭП. В практике электропривода накоплен опыт построения устройств получения информации о Ч^АО), основанных на:
- применении встраиваемых в АД датчиков потока (ДП), выполненных на элементах Холла, магнитодиодах, магниторезисторах или датчиках ЭДС машины (ДЭ) типа "активный" проводник или измерительная обмотка с диаметральным шагом;
- использовании вычислительных устройств косвенного определения ЧоА.
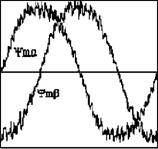
Обобщение опыта ТР систем ВПУ АЭП и их ИДС показывает, что в последнее время наблюдается устойчивая тенденция отказа от применения классических подходов к получению информации о 40A(t) с помощью встраиваемых в АД ДП и ДЭ. Причиной являются следующие недостатки датчиков ДП и ДЭ: усложнение конструкции вновь изготовляемых машин; необходимость выполнения низко технологичных операций разборки-сборки и монтажа датчиков при модернизации существующих электроприводов, ухудшающая их надежность и ремонтноспособность; наличие шумов в выходных сигналах. Последнее обстоятельство обусловлено несинусоидальностью полей в зазоре, коммутационными всплесками и зубцовыми гармониками. На рис.2 показаны осциллограммы сигналов потокосцепления 4ma,P полученных на выходах датчиков на элементах Холла, установленных в зазоре АД типа 4А56В2У3, мощностью 0.25 кВт, работающего в номинальном режиме при питании от сети. Спектр зубцовых гармоник при глубоком регулировании частоты вращения изменяется в широких пределах. Это приводит к необходимости введения в состав ИДС сложных перестраиваемых векторных фильтров, увеличивающих сложность аналитических расчетов
при синтезе АУ и предопределяющих необходимость проверки системы на устойчивость и отсутствие резонансных явлений во всем диапазоне регулирования.
Кроме перечисленных общих свойств, каждый из типов датчиков имеет свои специфические, накладывающие ограничения на его использование. Характерными для применения ДП являются:
- нелинейность их характеристик, зависящая от частоты и уровня магнитного потока;
- температурная нестабильность;
- соизмеримость толщины датчиков с величинами воздушных зазоров АД.
Особенности ДЭ предопределяют
необходимость выполнения операций
интегрирования сигналов без накопления
статической ошибки, обусловленной
неидеальностью применяемых интеграторов, согласования постоянных времени последних с частотами измеряемых сигналов, что осложняет техническую реализацию при больших диапазонах регулирования и, особенно, в зоне с нулевыми или близкими к ним частотами вращения. В силу перечисленных причин, промышленностью серийно не выпускаются АД со встроенными ДП или ДЭ, а системы ВПУ с непосредственной ОКБ по результатам прямых измерений потока находят применение лишь в опытных образцах АЭП.
Альтернативой применению встраиваемых
датчиков ДП и ДЭ является развивающийся
подход, основанный на использовании устройств
косвенного вычисления (УКВ) и наблюдателей-
идентификаторов координат (НИК). УКВ,
выполняемые на основе разомкнутых
динамических моделей (ДМ) наблюдаемых
электромагнитных процессов в АД или
функциональных преобразователей,
осуществляющих определение Ч°А по статическим зависимостям его от легко доступных измерению векторам Us и Is, не позволяют получить приемлемую для реализации ВПУ точность, т. к. в процессе вычисления не учитывается динамика электромагнитных и электромеханических процессов АД.
Наиболее совершенными средствами вычисления 4°A(t) и М(^) являются НИК, выполняемые на основе работающих в реальном масштабе времени прямых замкнутых ДМ АД полного или пониженного порядка, снабженных следящим контуром, обеспечивающим при работе его в СР сходимость наблюдаемых и истинных координат. Однако, кроме [3], большинство известных структур НК [4], синтезированы при стремлении построить ИДС без измерителей частоты вращения на валу с косвенным ее вычислением, что в условиях высокодинамичных, глубокорегулируемых АЭП систем ТВСД не позволяет получить точность вычисления координат, позволяющую в полной мере реализовать потенциально высокие регулировочные возможности систем ВПУ. Все известные НИК, предназначеные для вычисления потокосцепления Ч°А, имеют постоянную структуру ДМ и не могут быть применены в системах с изменяемой ОКБ без применения дополнительных вычислений.
С помощью методик [1,5] синтезирован НИК пониженного порядка. При синтезе НИК применена ДМ, полученная из (1 ) методом эквивалентных преобразований координатного базиса:
^ = -C1T^Ma + C2isa + C3(Ls')-1Usa + dt
+ C1C3fflisp
(3)
dt
+ C1C3fflisa dco_ do ~d7="dt"
^ = -C1TT14Ap + C2isp + C3(Ls')-1Usp +
J-1(M - Mc) = (C5 (^Aaisp - ^Apisa)- M )-1
где Uap - напряжения на выходах CК ИК, формируемые в СР по алгоритмам:
Up=Чp+VaUрЭ^ig((e+КГ^ ];
(4)
Uffl=K2jedt
В (4) обозначены: - напряжение на выходе реле СК; е = ш-со; К1,К2 - постоянные коэффициенты, полученные в процессе синтеза НИК и обеспечивающие в соответствии с принимаемыми критериями оптимизации требуемые характеристики НИК. На рис.3 представлена функциональная схема синтезированного НИК, соответствующая (3), (4). По аналогии с полученными АУ (2) настроечные коэффициенты НИК имеют переменные, программно устанавливаемые в соответствии с требуемой ОКБ, значения.
На рис.4 представлены результаты исследования АЭП с АУ (2), полученные при цифровом моделировании системы для варианта ОКБ 4°A = |4r| . Осциллограммы переходных процессов изменения координат со, М, |4r|, isu, isv ,|is|, 4ra, isa, 4% и isp и сигналов управления Uрс и Uррт, Uрат на выходах регуляторов получены для режимов работы с со* = 0, |ЧГ|*=0 и Мс=0 (0 - t1);
возбуждения машины |Чг|*=|Чг|ном на интервале времени (t1 - t2); работы с Мс= - Мном-^3-Й2) в том числе при: ю*=0 - (t4-t5), ю* = юном (t5-t7), со*=1,3соном - (t7-t9) и ю* = -юном (t9-t). Указанные режимы получены при стабилизации |4r| на уровнях: |Чг|*=|Чг|ном - (t1-t7) и (t9-t11), "ослаблении" потока до |4r|*= =0.7|Чг|ном - (t7-t9) и в режиме "насыщения" АД до уровня |Чг|*=1.3|Чг|ном - (t11-t).
Применение СУ АЭП с алгоритмами ВПУ (2), реализуемыми на основе выполненных в соответствии с (3), (4) НИК потока АД, обеспечивают высокую динамическую точность и устойчивость формирования электромагнитного момента АД с минимальными пульсациями. Системы рассмотренной структуры могут быть использованы при практической реализации унифицированных для ОКБ по векторам потокосцеплений 4s, 4m или 4r АЭП с ВПУ для механизмов с повышенными требованиями к точностным и динамическим характеристикам.
ЛИТЕРАТУРА
1 . Садовой А. В. Синтез и исследование оптимальных по точности систем управления электроприводами с низкой чувствительностью к широкому спектру дестабилизирующих факторов. Дис. на соиск. ученой степени доктора техн. наук. Днепродзержинск: ДИИ, 1992. - 501с.
2. Клименко Ю.М. Математическая модель асинхронного двигателя и синтез алгоритмов полеориентированного управления на ее основе // Юбилейный сборник научно-технических трудов ДГТУ. - Днепродзержинск, 1995. - С.518-527.
3. А.с.№ 1634108,1450706 Устройство определения координат следящего электромеханического модуля с АД / Ю.М.Клименко, А.В.Садовой, Б.В.Сухинин -Опубл. 1992,1987, - Бюл. №3,12.
4. Браславский И.Я.,ЗюзевА.М. и др.Синтез нейронного наблюдателя для асинхронного электропривода с прямым управлением моментом./Электротехника,№12, 2001,с.31-34.
5. Клименко Ю.М., Поликарпов Д.Ю. Структурно-алгоритмический синтез наблюдателя координат асинхронного двигателя для систем векторного полеориентированного управления // Контроль и управление в технических системах.- Винница, 1995.-С.488-490
.
|