
Источник: Revue internationale de génie électrique. Volume 5 – n 1/2002.
Резюме. Эта статья описывает метод обнаружения положения низких потерь для синхронных двигателей в режиме автокоммутации. Этот метод обрывает три фазных тока и измеряет якорное напряжение. Необходимое оборудование для его реализации очень простое. Данный метод возможен благодаря упругости современных ЦСП. Получаемая точность (<5°) допускает синусоидальное питание. Информация о позиции берется за несколько микросекунд (~100мкс). Метод очень надежен и не должен допускать перехода через ноль якорного напряжения. Цель этой статьи показать возможность измерения синуса синхронного двигателя в режиме автокоммутации без датчика с помощью ограниченного количества составляющих и в широком диапазоне скорости. Представленные многочисленные экспериментальные результаты показывают осуществимость и надежность предлагаемого метода. Диапазон скоростей простирается от 1 до более, чем 100% номинальной скорости исследуемых двигателей.
Ключевые слова: синхронный двигатель, бесколлекторный двигатель постоянного тока, ЦСП, техника расчета, управление двигателем, двигатель с постоянными магнитами, бездатчиковое обнаружение, обнаружение положения, система переменной скорости.
В наши дни, во многих отраслях промышленности синхронные двигатели питаются без помощи датчиков положения. Датчики уменьшают упругость систем, особенно при использовании двигателя во враждебных средах (вибрации, влажность). Кроме того, датчики увеличивают стоимость двигателя. Для синусоидального питания необходимо знать положение с высокой точностью. Для малых двигателей стоимость электроники непрямого обнаружения положения должна быть низкой. Несколько бездатчиковых методов развиты, но в основном, они не позволяют осуществлять синусоидальное питание или используют сложно управляемую электронику. Коэффициент высокой степени интеграции логических функций подталкивает обрабатывать сигналы все более многочисленно. Предлагаемый метод не является новым, но его предыдущие версии использовали дискретные компоненты относительно дорогие. Преимущество синусоидального питания – производство постоянного момента на низкой скорости и уменьшение электромагнитных помех (в сравнении с питанием 120°).
Метод основывается на упругости ЦСП из семейства Texas Instrument TMS320C24X и на малом числе внешних компонентов. Цель этой статьи – показать возможный способ извлечения информации о положении ротора с помощью нескольких унифицированных элементов. Данный метод развит для синхронных двигателей с синусоидальным якорным напряжением. С помощью нескольких преобразований он может распространиться и на двигатели, якорное напряжение которых не является синусоидальным.
Этот метод тестировался для различных двигателей. Эта статья представляет результаты двух двигателей со следующими характеристиками: двигатель 1 (3 фазы / 8 полюсов, Rs = 6 Ом, Ls = 500 мкГн, ke = 1.45 В/об/мин (коэффициент якорного напряжения), Ωном = 4500 об/мин) и двигатель 2 (3 фазы / 2 полюса, Rs = 0,2 Ом, Ls = 40 мкГн, ke = 1.8 В/об/мин, Ωном = 6600 об/мин).
Для анализа выбран трехфазный синхронный двигатель с постоянными магнитами, с соединением в звезду, с парой полюсов и синусоидальным якорным напряжением как показано на рисунке 1. В следующих строках используется только понятие синхронного двигателя. Этот двигатель может быть описан следующими уравнениями:
где Va, Vb, Vc – линейные напряжения, Rs – сопротивление фазы, Ls – индуктивность фазы, ia, ib, ic – фазные токи, θr – положение ротора, ke – коэффициент якорного напряжения, Ωr – частота вращения, VN – потенциал нейтрали.
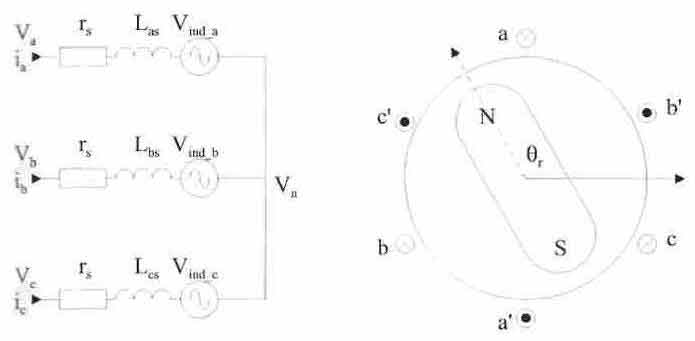
Рисунок 1 – Эквивалентная схема синхронного двигателя в режиме автокоммутации
Информация о положении ротора, включенная в уравнения, извлечена путем исключения трех фазных токов. Уравнения двигателя без токов принимают вид:

Три напряжения ветви Va, Vb, Vc могут быть измерены. Три неизвестных – Ωr, θr, VN. Потенциал нейтрали VN легко снять, рассматривая напряжения между фазами Vab и Vbc:

Эта система уравнений может быть приведена к системе координат dq:

Если Vd разделить на Vq:

Это уравнение также может записаться в следующем виде:

где tan-1 является обратной функции тангенс двух аргументов; следовательно, θr берется в пределах от 0 до 2π.
Парадокс должен быть разрешен. Три фазных тока используются для создания момента, но никакой ток не должен протекать в фазе, чтобы правильно извлечь информацию о положении. Эти две операции во временном отношении должны быть раздельными. Момент времени, когда токи застопорены и якорные напряжения измерены, должен быть малым (по отношению к механической постоянной времени), чтобы избежать колебаний скорости. Необходимое для метода оборудование представлено на рисунке 2.
Рисунок 2 – Физический принцип
ЦСП из семейства Texas Instrument TMS320C24X выбран для контроля моста питания, измерений напряжений ветви и расчетов положения. ЦСП также использовался для второстепенных задач, например для управления линией RS232. Мост питания специфичен для двигателя и для применения. Он обычно состоит из драйверов, транзисторов и диодов. Каждый транзистор управляется индивидуально с помощью ЦСП. Защитный контур (два резистора и один стабилитрон на фазу) ограничивает диапазон входа преобразователя A/D, если напряжения ветви отрицательны или более 5 В.
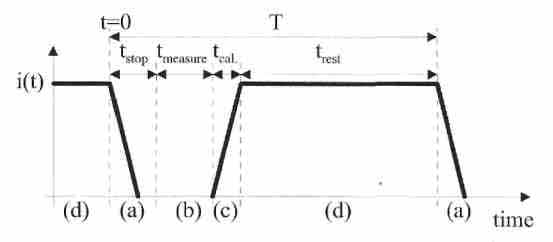
Рисунок 3 – Сегментация цикла
Три фазных тока периодически стопорятся, время также делится на периоды продолжительностью Т, как показано на рисунке 3. Каждый период сегментируется на четыре секции:
Когда ЦСП подключает мост питания на высокое сопротивление, токи быстро стопорятся. Как показано на рисунке 4, могут быть рассмотрены два состояния: (I) фазный ток положителен, (II) фазный ток отрицателен. При оставшейся части развития, рассмотрено только состояние (I). Если двигатель не работает как генератор, худший случай для рассмотрения для гашения тока имеет место при низком якорном напряжении, т.е. при низких скоростях. До полного гашения тока, последний подчиняется следующему закону (мост питания подключается на высокое полное сопротивление в момент времени t=0):

Пока ток не будет равен i(tstop)=0. Таким образом, получим:

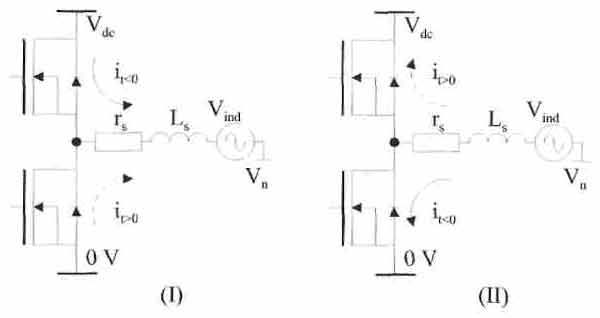
Рисунок 4 – Принцип циркуляции токов
Сопоставимая формула получена для второго случая (II). Время, необходимое для остановки тока пропорционально Ls, i0 (фазный ток до решения остановки, t=0) и обратно пропорционально напряжению моста питания Vdc. Для двигателя 1 (L = 500 мкГн, i0_max = 1.1 A, Vdc = 12 В), время tstop 100 мкс, и для двигателя 2 (L = 40 мкГн, i0_max = 5 A, Vdc = 24 В), время tstop 17 мкс. Время tstop показывает время ожидания между решением остановки тока и началом измерений напряжений между фазами.
При нулевых токах якорные напряжения между фазами измерены. С этой целью первая фаза (а) подсоединяется к нулевому потенциалу, подключая транзистор, и напряжения двух других фаз читаются преобразователями A/D. Диапазон входа преобразователей простирается от 0 до 5 В. Два дифференциальных напряжения Vdc и Vca могут быть положительными или отрицательными. Если оба положительны, преобразователь A/D правильно читает значения, как показано на рисунке 5. Но, если Vba или Vca отрицательно (рисунок 6, Vca < 0), ток циркулирует сквозь диод свободного выбега и напряжение фазы Vb или Vc является немного отрицательным. В данном случае, преобразователь A/D читает ноль и измерение отклоняется. Затем измерения повторяются для двух других фаз, подсоединенных к нулевому потенциалу. Как Vab+Vbc+Vca = 0, два дифференциальных потенциала дают третий.
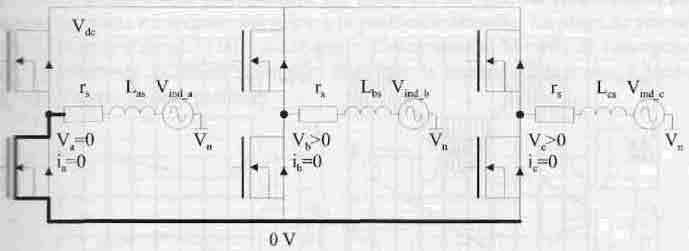
Рисунок 5 – Измерение положительного напряжения
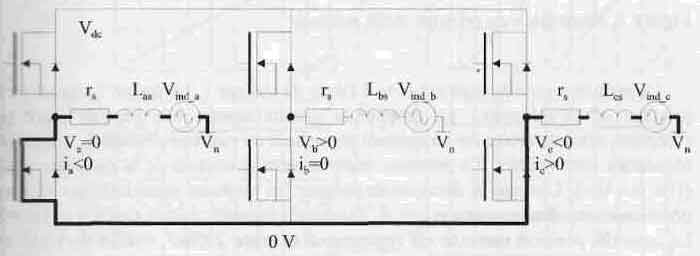
Рисунок 6 – Измерение отрицательного напряжения
ЦСП снова активирует мост питания и рассчитывает Vd, Vq и наконец, положение θr. В конце этой секции доступно новое положение.
Оставшееся время периода Т может быть использовано для регуляторов тока и скорости. Оно также может быть использовано для экстраполяции положения между двумя величинами.