Ідентифікація моменту інерції електроприводу рекурентним методом найменших квадратів
Журов І.О., Толочко О.І.
ДВНЗ «Донецький національний технічний університет»
Источник: Вісник кафедри «Електротехніка» за підсумками наукової діяльності студентів. - Донецьк, ДонНТУ, 2011 – С.22-24.
Для якісного керування електромеханічною системою необхідно мати максимум достовірної інформації про об'єкт керування. Ця задача ускладнюється у випадку, коли параметри ОК невідомі чи змінюються в процесі його роботи. Наприклад, в електроп-риводі з асинхронним двигуном такими параметрами є активні опори обмоток статора й ротора, взаємна індуктивність, момент інерції приводу, який володіє найбільшим діапазоном змін у процесі роботи.
Мета роботи. Розробка алгоритму ідентифікації моменту інерції електроприводу з використанням рекурентного методу найменших квадратів (РМНК) та аналіз його роботи на математичній моделі системи векторного керування асинхронним двигуном з короткозамкненим ротором.
Вираз для вектору оцінок параметрів об’єкту керування за РМНК має вигляд [1]:
 (1)
(1)
де  – вектор виміряних сигналів на k-му такті;
– вектор виміряних сигналів на k-му такті;  – вихідний сигнал об’єкту керування на k-му такті;
– вихідний сигнал об’єкту керування на k-му такті;  – вихідний сигнал адаптивної моделі на k-му такті;
– вихідний сигнал адаптивної моделі на k-му такті;
Вихідний сигнал адаптивної моделі є добутком вектору виміряних сигналів  та вектору оцінок параметрів
та вектору оцінок параметрів  . При цьому в загальному випадку частина коефіцієнтів можуть бути відомими величинами. Тоді вектор
. При цьому в загальному випадку частина коефіцієнтів можуть бути відомими величинами. Тоді вектор  повинен містити тільки невідомі коефіцієнти, вектор
повинен містити тільки невідомі коефіцієнти, вектор  – тільки ті компоненти вхідних та вихідних сигналів, які помножуються на невідомі коефіцієнти, а сума добутків решти компонент на відомі коефіцієнти додається у вигляді відомого сигналу
– тільки ті компоненти вхідних та вихідних сигналів, які помножуються на невідомі коефіцієнти, а сума добутків решти компонент на відомі коефіцієнти додається у вигляді відомого сигналу  :
:
 (2)
(2)
Вектор корекції  розраховується за наступним виразом:
розраховується за наступним виразом:
 (3)
(3)
де  – матриця, яка впливає на швидкість ідентифікації, для якої задається початкова умова
– матриця, яка впливає на швидкість ідентифікації, для якої задається початкова умова  ;
;  - велика константа;
- велика константа;  - діагона-льна одинична матриця.
- діагона-льна одинична матриця.
Відмітимо, що у випадку, коли ідентифікації підлягає лише один параметр, всі вище розглянуті векторні величини стають скалярними.
Для розробки алгоритму ідентифікації моменту інерції зручно використати передатну функцію механічної частини приводу:
 (4)
(4)
де  – кутова швидкість обертання ротора;
– кутова швидкість обертання ротора;  – електромагнітний момент двигуна та момент статичного опору, приведений до валу двигуна, відповідно.
– електромагнітний момент двигуна та момент статичного опору, приведений до валу двигуна, відповідно.
При дискретизації ПФ (4) методом Тастіна отримуємо наступне різницеве рівняння, яке є початковим для побудови адаптивної моделі:
 (5)
(5)
де  – період дискретності адаптивної моделі.
– період дискретності адаптивної моделі.
З аналізу рівняння (5) витікає, що задача ідентифікації моменту інерції приводу пов’язана з задачею визначення моменту статичного опору, величина якого не піддається прямому вимірюванню. Тому, для ідентифікації  бажано мати математичну модель, яка не містила б моменту статичного опору. Вирішення цієї проблеми розглянуто у [2].
бажано мати математичну модель, яка не містила б моменту статичного опору. Вирішення цієї проблеми розглянуто у [2].
Остаточний вираз для дискретної моделі механічної частини електроприводу:
 (6)
(6)
З урахуванням (6) рівняння (1) приймає вигляд:
 (7)
(7)
Ідентифікований параметр формується з параметрів адаптивної моделі згідно рівнянню:
 (8)
(8)
та фільтрується аперіодичною ланкою з постійною часу T .
.
Структурна схема ідентифікатора, розроблена у пакеті Matlab додатку Simulink представлена на рис. 1.
 |
Рисунок 1 – Структура ідентифікатора моменту інерції електроприводу |
Результати моделювання системи векторного керування АД з ідентифікацією приведені на рис. 2.
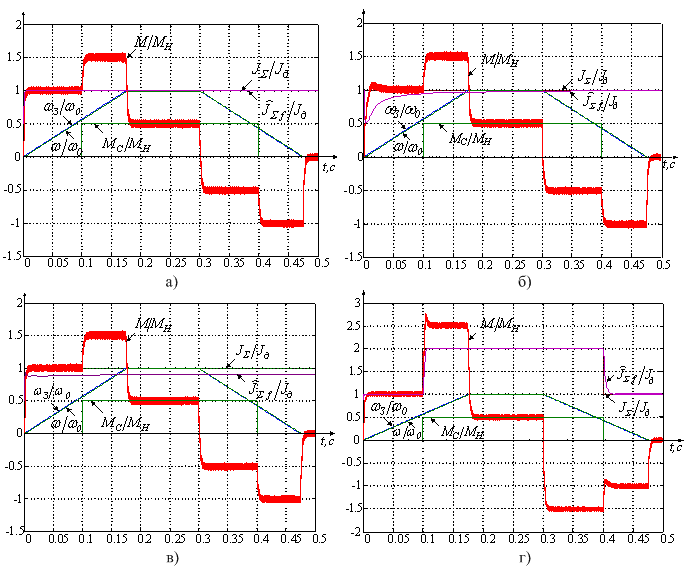 |
Рисунок 2 – Перехідні процеси з урахуванням ідентифікації моменту інерції електроприводу |
Аналізуючи отримані результати, можна зробити висновок, що на швидкість ідентифікації впливає константа, закладена в ідентифікаторі в якості початкової умови.
Точність ідентифікації залежить від періоду дискретності ідентифікатора.
При цьому необхідно, щоб період дискретності ідентифікатора був рівний або менше у ціле число разів періоду дискретності регулятора струму.
Розроблений алгоритм ідентифікації дає адекватний результат як при постійному моменту інерції електроприводу, так і у разі його зміни у процесі роботи.
Література
- Изерман Р. Цифровые системы управления / Изерман Р. – М.: Мир, 1984. – 541 с.
- Трандафілов В.М. Особливості градієнтного метода ідентифікації моменту інерції електроприводу / В.М. Трандафілов, О.І. Толочко, В.В. Божко // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць X Міжна-родної науково-технічної конференції аспірантів та студентів в м. Донецьку 18-20 тра-вня 2010 р. – Донецьк: ДонНТУ, 2010. – С. 260-262.