Дослідження впливу періоду переривання цифрових спостерігачів стану двомасового електромеханічного об'єкту на точність ідентифікації
Трандафілов В.М., студент; Толочко О.І., проф., д.т.н.
ДВНЗ «Донецький національний технічний університет»
Источник: Вісник кафедри «Електротехніка» за підсумками наукової діяльності студентів. - Донецьк, ДонНТУ, 2010 – С. 135-136.
В більшості випадків при побудові систем автоматичного керування електроприводом, зв'язок двигуна з виконавчим органом механізму вважають жорстким. Але це припущення є вірним лише тоді, коли частота власних пружних коливань механізму є значно вищою за частоту, що визначає швидкодію системи автоматичного керування (САК). Якщо ця умова не виконується, нехтування пружним зв’язком може привести до незадовільної роботи системи. Тому, зазвичай, такі системи розглядають, як двомасові електромеханічні об’єкти (ДЕМО).
Для побудови якісної системи керування ДЕМО потрібно мати інформацію про пружний момент та швидкість другої маси. Безпосереднє вимірювання цих сигналів є досить складним, а в багатьох випадках взагалі неможливим. Тому інформацію про ці координати, найчастіше отримують за допомогою цифрових спостерігачів стану.
Мета роботи: проаналізувати вплив величини періоду переривання на якість ідентифікації пружного моменту та швидкості механізму цифровим спостерігачем стану, створеним на основі аналогового спостерігача підстановочним методом, з урахуванням похибок в розрахунку параметрів об‘єкта регулювання.
Для синтезу цифрового спостерігача стану (ЦСС) за основу візьмемо аналоговий спостерігач для систем керування ДЕМО, відомий як еквівалентний статичний спостерігач стану (ЕССС). Структурна схема цього спостерігача у в.о., в основу якої закладено модель ДЕМО, що не враховує в’язке тертя, наведена на рис. 1.
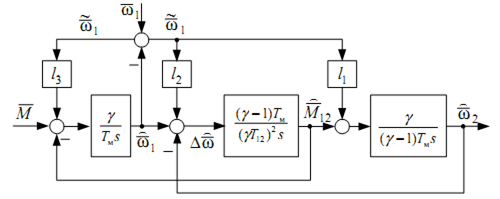 |
Рисунок 1 – Структурна схема спостерігача ЕССС |

Одна з можливих схем ЦСС ДЕМО на основі аналогового ЕССС, отримана за допомогою підстановочних методів наведена на рис. 2 [1].
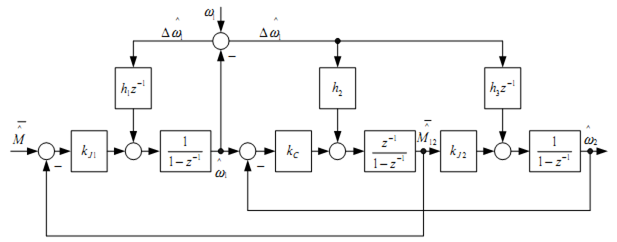 |
Рисунок 2 – Структурна схема ЦСС ДЕМО отримана на основі аналогового ЕССС за допомогою підстановочних методів |

Коефіцієнти підпорядкованої структури у відповідності з модульним критерієм дорівнюють:

де Т0 – період дискретності, Тм – сумарна електромеханічна стала часу ДЕМО.
Відповідні параметри спостерігача навмисно зроблено дещо відмінними від па- раметрів об’єкту, щоб імітувати неточність їх вимірювання або розрахунку, яка зазвичай має місто на практиці, а саме:

Дослідження показали, що при зростанні періоду переривання спочатку збільшується статична похибка ідентифікації, а при подальшому зростанні спостерігач навіть втрачає стійкість.
Запобігти цього явища можна, якщо перетворити аналоговий спостерігач до виду рис.2, а потім виконати його дискретизацію методом відповідності нулів-полюсів.
Дослідження, виконані методом математичного моделювання підтвердили ефективність такого рішення.
Література
- Звіт про науково-дослідну роботу «Оптимізація функціонування електромеханічних систем із цифровим регулюванням» / П. Х. Коцегуб, О. І. Толочко, С.С. Старостин, П. І. Розкаряка, Г.С. Чекавський В.В. Божко. – Донецьк: ДонНТУ, 2009. – С. 154-157.