Астатическая по нагрузке система управления скоростью асинхронного двигателя с наблюдателем состояния
Толочко О.И., Чекавский Г.С., Песковатская О.В.
Донецкий национальный технический университет
Источник: Сборник материалов V Международной (XVI Всероссийской) научной конференции по автоматизированному электроприводу "АЭП-2007": 18 -21 сентября 2007 г. - Санкт-Петербург, 2007. - С. 69 - 71.
Введение. Системы векторного управления (СВУ) асинхронным двигателем (АД) позволяют получить высококачественные статические и динамические характеристики электропривода. Основным сдерживающим фактором для внедрения таких систем в промышленности является сложность или невозможность измерения отдельных координат, таких, как потокосцепление ротора и частота вращения ротора двигателя. Применение математических моделей (идентификаторов координат), использующих в качестве входных сигналов информацию о фазных напряжениях и токах АД, при вычислении потокосцепления дает удовлетворительные результаты [1]. При оценке же частоты вращения (скорости) ротора двигателя такие модели обычно содержат дифференцирующие звенья, и также приводят к появлению алгебраических контуров, что снижает точность идентификации и затрудняет ее техническую реализацию. В связи с этим одним из перспективных альтернативных методов восстановления скорости двигателя при создании качественных СВУ без использования механических датчиков на валу двигателя является использование наблюдателей состояния (НС), которые при традиционном подходе к их синтезу [2] лишены указанных недостатков и позволяют, кроме частоты вращения ротора, оценить величину статического момента на валу двигателя. Эта оценка может быть использована для реализации комбинированного управления по возмущающему воздействию с целью ликвидации статизма СВУ по нагрузке. Результаты исследований. Математическое описание короткозамкнутого АД в ортогональной системе координат d,q , ориентированной по вектору потокосцепления ротора, используемое при традиционном векторном управлении, имеет вид:

где usd, usq, isd, isq,  - ортогональные составляющие вектора напряжения и тока статора АД и модуль вектора потокосцепления ротора; M, Mc – электромагнитный момент АД и статический момент, приведенный к валу АД;
- ортогональные составляющие вектора напряжения и тока статора АД и модуль вектора потокосцепления ротора; M, Mc – электромагнитный момент АД и статический момент, приведенный к валу АД;  – частота вращения (скорость) ротора АД;
– частота вращения (скорость) ротора АД;  – частота вращения системы координат d,q ; TR=LR/RR – электромагнитная постоянная времени ротора; RS, RR – активные сопротивления обмоток фаз статора и ротора; kR=Lm/LR – полные индуктивности статора и ротора и взаимоиндуктивность.
– частота вращения системы координат d,q ; TR=LR/RR – электромагнитная постоянная времени ротора; RS, RR – активные сопротивления обмоток фаз статора и ротора; kR=Lm/LR – полные индуктивности статора и ротора и взаимоиндуктивность.
Анализ математического описания (1) показывает, что прямую часть НС, оцени-вающего скорость АД, можно сформировать из части структурной схемы объекта регу-лирования, полученной из системы (1) после исключения из нее первых двух уравне-ний и сигнала Mc в уравнении движения привода, как неизмеряемого возмущения. Структурная схема такого НС представлена на рис.1. Его входными сигналами являются измеряемые координаты usq, isd, isq и восстанавливаемые при помощи идентификатора потокосцепления [1] и .
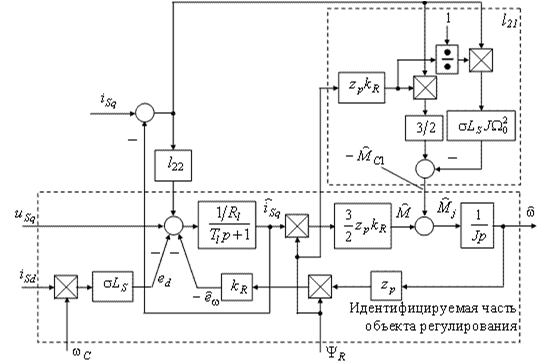 |
Рисунок 1 – Структурна схема наблюдателя состояния |

коэффициенты корректирующих связей НС, должны вычисляться по формулам:

Для нормальной работоспособности НС его среднегеометрический корень дол-жен превышать среднегеометрический корень системы, поэтому его значение может быть принято равным
 (2).
(2).
Восстановленное значение скорости отличается от действительной скорости на величину , пропорциональную моменту нагрузки Mc , поскольку последний не воздействует на НС, но прикладывается к объекту. При совпадении сходственных параметров объекта регулирования и его модели в составе НС передаточную функцию Kf(P) от статического момента до ошибки оценивания скорости, как показано в [3], можно определить по структурной схеме рис.2:

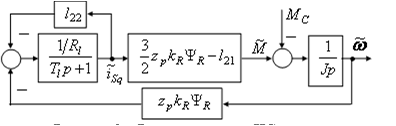 |
Рисунок 2 – Расчетная схема НС для ошибки оценивания скорости |

Из выражения (3) следует, что, имея информацию о статическом моменте, ошибку оценивания скорости можно скомпенсировать. Учитывая наличие в наблюдателе, представленном на рис.1, оценки динамического момента , момент статического сопротивления можно идентифицировать по одной из следующих формул:

Наблюдатель состояния с компенсацией статической ошибки оценивания скорости приведен на рис.3.
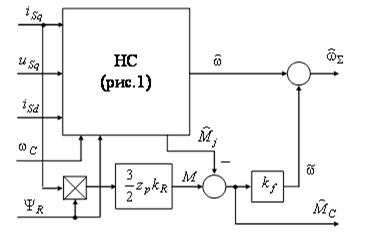 |
Рисунок 3 – Структурная схема НС с компенсацией ошибки оценивания скорости и вычислением статического момента |

Восстанавливаемый с помощью НС сигнал статического момента может быть использован для организации канала компенсации возмущения (статического момента). Для достижения астатизма системы по возмущению коэффициент передачи корректирующей связи по оценке статического момента должен быть равен

Выберем в качестве желаемого характеристического полинома полином Баттер-ворта и зададимся конкретными параметрами АД (тип 4А-112-М4, 5.5 кВт, 380 В, 10.4 А). Сравним между собой представленные на рис.4 графики переходных процессов при набросе нагрузки в следующих астатических СВУ: 1) в предложенной системе с комбинированным управлением по оценке стати-ческого момента, замкнутой по оценке скорости (непрерывные линии); 2) в традиционной СВУ с пропорционально-интегральным РС, замкнутой по из-меренной скорости (пунктирные линии); 3) в идеализированной СВУ с пропорциональным РС и с комбинированным управлением по измеренному статическому моменту, замкнутой по измеренной скоро-сти (точечные линии).
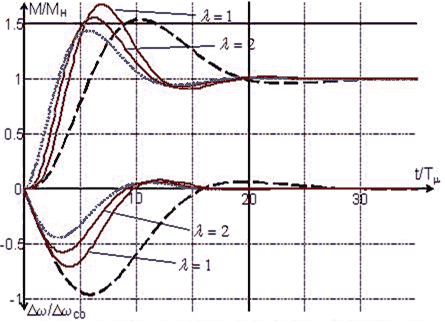 |
Рисунок 4 – Переходные процессы в СВУ при набросе нагрузки |
Выводы.
- Синтезированный НС позволяет точно восстанавливать значение частоты вращения ротора АД за счет компенсации ошибки оценивания, возникающей при наличии возмущающего воздействия в объекте (момента нагрузки).
- Восстанавливаемое значение момента нагрузки может быть использовано для организации дополнительной связи в однократно-интегрирующей СВУ скоростью АД с целью полной компенсации статизма системы, причем по сравнению с динамическими свойствами традиционных двукратно-интегрирующих СВУ удается уменьшить динамическую просадку скорости и время ее восстановления без существенного увеличения пере регулирования по электромагнитному моменту, которое к тому же может быть снижено при увеличении .
- Выполненные теоретические исследования системы, замкнутой по оценке скорости, позволяют судить о возможности использования синтезированного НС для построения астатических по возмущению систем косвенного рег улирования скорости АД с векторным управлением и ориентацией по вектору потокосцепления ротора без установки механических датчиков на валу двигателя. При этом дополнительных исследований требуют вопросы разработки и сравнительного анализа способов снижения чувствительности НС к помехам во входных сигналах и к изменению параметров объекта, разработки мер по практической реализации НС и управляющей части системы в целом и др.
Литература
- Пивняк Г.Г., Волков А.В. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией: Монография. – Днепропетровск: Национальный горный университет, 2006. – 470 с.
- Кузовков Н.Т. Модальное управление и наблюдающие устройства. – М.: Ма-шиностроение, 1976. – 184 с.
- Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану. Навч. посібник для студентів вищих навчальних закладів. – Донецьк: Норд-Прес, 2004. – 298 с.