
Основним напрямком розвитку вугільної галузі є створення вугледобувних підприємств на зразок «лава-шахта», забезпечують доведення видобутку вугілля з лави до 20000 т / добу. Інтенсифікація видобутку дозволить знизити собівартість видобутого вугілля шляхом підвищення продуктивності праці, скоротити загальну кількість шахт (а отже, капітальні та транспортні витрати і витрати на підтримку їх структури) і підвищити безпеку ведення гірничих робіт. Приклад відпрацювання шахтного пласта наведений на малюнку 1.

Малюнок 1 - Схема відпрацювання шахтного пласта (кількість кадрів - 20; кількість циклів повторення - 50; розмір - 17,9 КВ)
Актуальність теми полягає в тому, що розвиток вуглевидобутку характеризується все зростаючою інтенсифікацією навантаження на очисний забій. Для реалізації такого видобутку важливим є забезпечення необхідного фронту робіт, тобто своєчасна підготовка очисних вибоїв при їх відпрацюванні зворотним ходом.
Наукова значимість роботы полягає в тому, що здатність комбайна забезпечити поєднання таких операцій у часі, як:
дозволяє значно скоротити тривалість робочого циклу проходження вироблення, а можливість проходження виробок з високою якістю бічних поверхонь і грунту - значно підвищити ефективність його роботи за рахунок зниження обсягу руйнується маси і значного скорочення обсягу забутовки.
Практична цінність результатів роботи. Під час проведення підготовчих виробок у породному масиві можуть зустрічатися включення підвищеної фортеці, виїмку яких сучасні машини забезпечити не можуть. Використовувати в якості альтернативної буропідривних виїмку недоцільно внаслідок низької продуктивності та високої небезпеки робіт. Тому подальше підвищення технічного рівня прохідницьких комбайнів на сьогодні є актуальною проблемою розвитку гірничого машинобудування. У літературі нерідко підкреслюється необхідність розширення області застосування прохідницьких комбайнів на породи підвищеної міцності. Проте однозначної і доцільного варіанта її рішення до цих пір немає. На основі аналізу теоретичних досліджень і експериментальних даних, намічені наступні напрямки вирішення цього завдання:
З іншого боку, інтенсифікація видобутку може бути досягнута:
Саме обгрунтуванню структури виконавчого органу прохідницького комбайна і присвячена моя магістерська робота.
Для оцінки необхідних темпів проходки були розраховані їх значення в залежності від добового видобутку лави (мал. 1) при виїмці пластів різної потужності (m1 = 2 м, m2 = 1,5 м) для різних значень Lл (250 і 200 м), LС (1000 і 2000 м) і tм (20 і 40 днів).
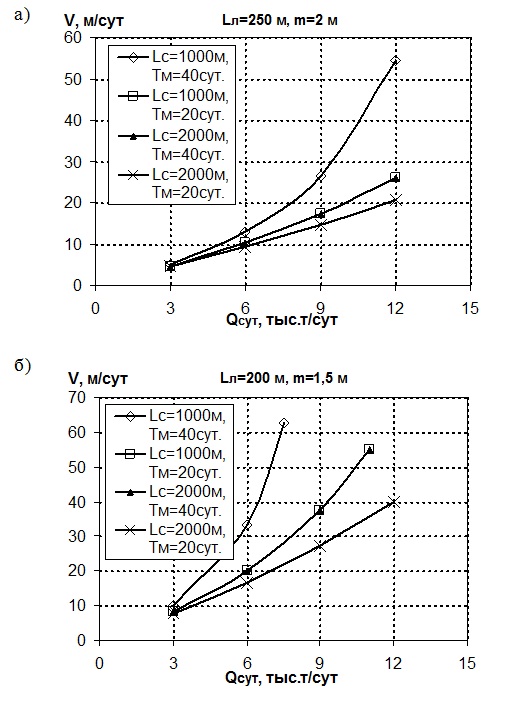
Малюнок 2 - Залежність необхідних темпів проходки від добового видобутку при довжині лави і потужності пласта відповідно 250 м і 2 м (а) і 200 м і 1,5 м (б)
Аналіз залежностей показав, що зниження потужності пласта призводить до збільшення темпів проходки при одній і тій же добової продуктивності і інших рівних умовах, збільшення довжини стовпа і зниження часу монтажу лави забезпечує зниження необхідних темпів проходки. Для довжини стовпа 2000 м і тривалості монтажних робіт 20 днів темпи проходки при добового видобутку з лави близько 12 тис. т складають відповідно 20 м / добу при m = 2 м і Lл = 250 м і 40 м / добу при m = 1,5 м і Lл = 200 м, що при 25 робочих днях забезпечує проходження 500 і 1000 м / міс. Ці значення істотно більше фактичних показників комбайнової проходки на багатьох шахтах України та країн СНД. Таким чином, для подальшої інтенсифікації очисних робіт темпи проходки повинні бути збільшені.
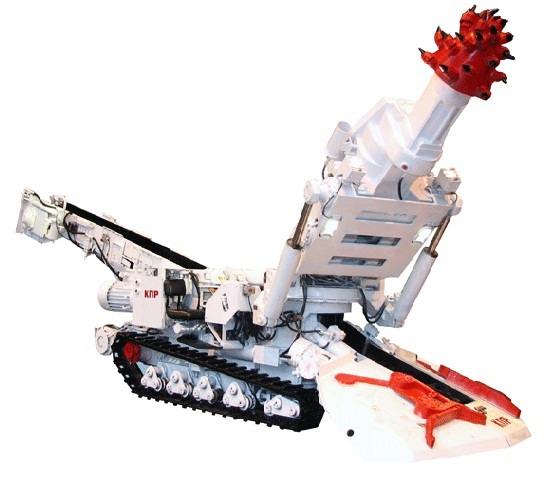
Малюнок 3 - Прохідницький комбайн з повздовжньо осьової коронкою
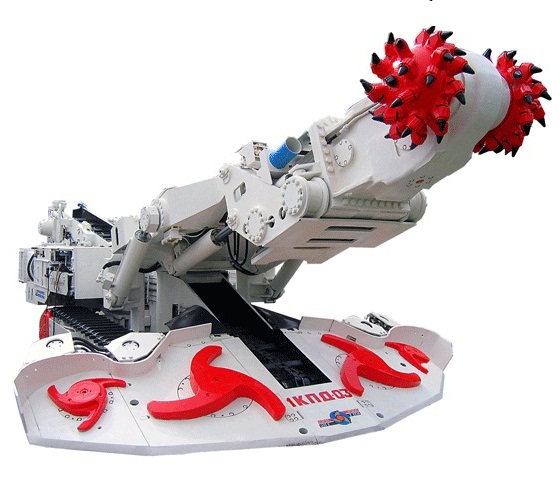
Малюнок 4 - Прохідницький комбайн з поперечно осьової коронкою
Прохідницькі комбайни із стрілоподібним ІВ здійснюють послідовну обробку забою ріжучої коронкою. Залежно від типу коронки розрізняють ІВ: з поздовжньо-осьовий (радіальної) коронкою (рисунок 1), з поперечно-осьовий (аксіальної) коронкою (малюнок 2).
Очевидно, що зважаючи на конструктивні особливості стрілоподібного ВО з поперечно-осьовою коронкою якість обробки забою гірше, ніж при роботі ВО з поздовжньо-осьовою коронкою, спостерігається характерна хвилястість профілю поздовжнього перерізу виробки. Незважаючи на пропоновані рішення, в процесі експлуатації прохідницьких комбайнів розглянутого класу мають місце значні по амплітуді коливання виконавчого органу, що призводять до порушення цілісності масиву оконтурювальних порід, перебору породи та іншим негативним явищам.
Слід зазначити, що ВО з поперечно-осьовою коронкою краще з точки зору забезпечення стійкості прохідницького комбайну, ніж ВО з поздовжньо-осьовий коронкою, тому що зусилля повороту, яке необхідно докласти до стріли для її переміщення в першому випадку значно менше, ніж у другому. Це викликано тим, що при горизонтальній подачі поперечно-осьовий коронки на зусилля повороту роблять вплив тільки сили подачі на різця, але не сили різання, що розташовані в площинах, перпендикулярних до напрямку подачі. Разом з тим, слід відзначити і недоліки ВО цього типу:
Однією з умов ефективної та безпечної роботи при проведенні підготовчих виробок на шахтах України є забезпечення їх стійкості при мінімальному витраті кріплять матеріалів. Кріплення, виконані з важких профілів спеціального прокату (арочна кріплення), в умовах значного напруженого стану гірського масиву не забезпечують необхідної стійкості і безремонтного підтримки виробок. Їх зведення є погано піддається механізації трудомістким процесом. Матеріаломісткість кріплень знижує техніко-економічні показники проходки і, значною мірою, стримує темпи проведення виробок. За останні роки все більшого поширення у вугільній та гірничо-рудної промисловості отримує анкерне кріплення, що підвищує стійкість гірських виробок і дозволяє збільшити темпи ведення підготовчих робіт при економії коштів на їх підтримку.
Застосування анкерного кріплення на шахтах країн з розвиненою вуглевидобувною промисловістю дозволило в 5-10 разів зменшити витрату металопрокату, бетону, лісу; в 3-5 разів підвищити продуктивність робіт при кріпленні виробок; в 2-3 рази підвищити темпи проходки; вдвічі скоротити витрати на кріплення і підтримку крепі в робочому стані під час експлуатації.
Важливим достоїнством анкерного кріплення є прямокутна форма перерізу виробки, що істотно полегшує підготовчі роботи прохідницьким бригадам, а головне збільшує їх темп, дає можливість використання ріжучих дисків з застосуванням шарошок, а значить дозволяє працювати в умовах з високою фортецею порід.
Згідно з даними [8] перебір по контуру виробки становить навіть при автоматизованому управлінні до 20% від перетину виробки начорно (kS = 1,2). Визначальний вплив на величину перебору поряд з кінематикою виконавчого органу і формою коронки надає точність обробки забою, забезпечувана системою управління комбайна. Зниження величини kS може бути реалізовано на основі підвищення якості реалізації складних і точних рухів виконавчого органу, що зумовлює застосування систем інтелектуального управління.
Структурна схема прохідницького комплексу для проведення підготовчих виробок у проходці по породах міцністю до 120 МПа з темпом 800-1000 м / міс повинна забезпечувати:
На закінчення хотілося б відзначити, що роботи з удосконалення вугільної техніки необхідно вести і далі, концентруючи увагу конструкторів на таких питаннях як селективна виїмка вугілля, коефіцієнт готовності комбайна та ін Для забезпечення високих темпів проходки комбайн має проектуватися як мехатронних система з інтелектуальною системою управління, що забезпечує поряд з іншими функціями: