Источник: Інформатика та комп'ютерні технології - 2007 / Матеріали III науково-технічної конференції молодих учених та студентів. - Донецьк, ДонНТУ - 2007, с. 77-78.
Комплекс скипового подъема состоит из технологических узлов: разгрузки вагонеток или конвейерной линии в приемный бункер скипового подъема в околоствольном дворе; загрузки скипов; подъема; разгрузки скипов в прием-ный бункер поверхности; выгрузки угля из приемной емкости в транспортную систему технологического комплекса поверхности шахты. Конструктивное со-вершенство и надежность работы загрузочных и разгрузочных устройств явля-ется одним из основных условий надежной работы всей системы автоматиза-ции комплекса подъема. Поэтому реконструкции и модернизации этих уст-ройств уделяется первостепенное внимание при автоматизации подъемной ус-тановки.
Анализ литературных источников и опыт эксплуатации [1, 2] показал, что в настоящее время на шахтах автоматизирован процесс подъема скипов с при-менением аппаратуры АГП-61 (АГП-2), обеспечивающей совместно с аппара-турой АЗК-1 выполнение заданной тахограммы, а также процесс загрузки ски-пов автоматизирован при помощи аппарата КДС, основанный на весовой дози-ровке угля в подъемный сосуд. Процесс разгрузки вагонеток в околоствольном дворе осуществляется в дистанционном режиме управления при помощи уни-фицированных опрокидывателей (для вагонеток с глухим кузовом) и разгру-зочных кривых (для вагонеток с открывающимся днищем), которые не требу-ют специального дополнительного оборудования и средств автоматизации. Процессы разгрузки скипов в приемные бункера поверхности шахты, осущест-вляющиеся при помощи копровых разгрузочных кривых, также не требуют до-полнительных специальных средств автоматизации, так как при этом исполь-зуются механические блокировки, срабатывающие при подходе скипа к опре-деленной точке на разгрузочной кривой. Выгрузка угля из приемных бункеров в поточно-транспортную сеть поверхности в настоящее время не автоматизиро-вана, а осуществляется в дистанционном режиме оператором поверхностного комплекса.
Приведенное выше показывает, что для повышения уровня автоматизации с целью повышения эффективности работы скипового подъема в целом необ-ходимо автоматизировать в основном два динамических процесса: подъем (опускание) сосудов и их загрузку в околоствольном дворе, а также процесс вы-грузки приемных бункеров на поверхности шахты, который и рассматривается ниже в данной работе.
Для решения указанной задачи необходимо составить структурную схему разгрузочного устройства и определить передаточные функции отдельных эле-ментов и системы автоматического управления в целом с целью повышения эффективности работы скипового подъема. При исследовании динамических процессов, протекающих в элементах и системе использовать основные поло-жения теории автоматического регулирования и общепринятые способы преоб-разования структурных схем.
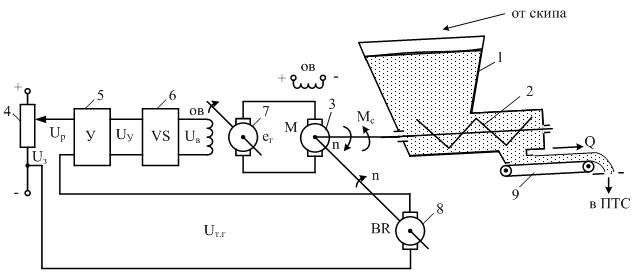
Разгрузочное устройство, схема которого приведена на рисунке 1, включает в свой состав технологические элементы: приемный бункер 1; шнековый пи-татель 2, который приводится в движение двигателем постоянного тока 3 с час-тотно-регулирующей схемой управления, состоящей из задатчика 4, операци-онного усилителя 5, тиристорного преобразователя 6, генератора 7 и тахогене-ратора 8; короткий разгрузочный конвейер 9. При этом количество угля Q, по-ступающего в транспортную систему технологического комплекса поверхности шахты, пропорционально числу оборотов шнекового питателя.
Структурная схема системы стабилизации подачи угля приведена на рисунке 2.
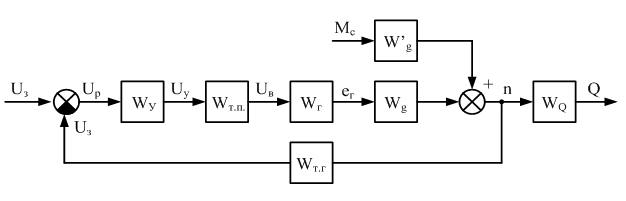
На структурной схеме управления частотой вращения двигателя (см. рис. 2) двигатель М представлен в виде двух звеньев Wg и W'g выходные величины которых суммируются.
Передаточная функция двигателя по управляющему воздействию (ЭДС ге-нератора ег)
 (1)
(1)
где ТМ – электромеханическая постоянная времени электродвигателя;
ТЯ – электромагнитная постоянная якоря электродвигателя.
По возмущающему воздействию (моменту нагрузки Мс)
 (2)
(2)
Передаточная функция генератора
 (3)
(3)
Тиристорный преобразователь может рассматриваться как практически безинерционное звено
 (4)
(4)
Операционный усилитель выполняет простейший алгоритм – пропорцио-нальное усиление сигнала
 (5)
(5)
Тахогенератор BR является безинерционным звеном [2]:
 (6)
(6)
Передаточная функция замкнутой системы по задающему воздействию
 (7)
(7)
где Wр.к(р) – передаточная функция разомкнутого контура
 (8)
(8)
По возмущающему воздействию
 (9)
(9)
После подстановки в выражения (7), (8)и (9) передаточных функций отдельных элементов получим:
 (10)
(10)
 (11)
(11)
 (12)
(12)
где (13) коэффициент передачи разомкнутого контура
 (13)
(13)
Передаточные функции (10), (11) и (12) согласно [2], можно записать в виде отношения двух полиномов. Согласно принципу суперпозиции уравнение динамики в операционной форме имеет вид
 (14)
(14)
или в развернутом виде
 (15)
(15)
Характеристическое уравнение системы
 (16)
(16)
Подставляя в уравнение динамики (15) значение р = 0, получим уравнение статики
 (17)
(17)
С учетом разгрузочного конвейера находим
где τ – чистое транспортное запаздывание, которым в случае короткого конвей-ера (когда τ<<ТЯ(ТМ)) можно пренебречь.
Тогда уравнение статики в окончательном виде запишем
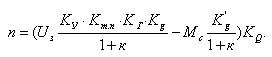 (18)
(18)
Вывод. Полученные зависимости позволяют синтезировать систему авто-матической загрузки скипа, позволяющую повысить уровень автоматизации рассматриваемого технологического звена скипового подъема и, тем самым, эффективность и безаварийность работы главного подъема шахты в целом.
1. Мелькумов Л.Г. Автоматизация технологических процессов угольных шахт / Л.Г. Мелькумов, Н.Я Лазукин, Б.Х. Богопольский, Р.Л. Розенберг. – М.: Недра, 1973. – 350 с.
2. Лукас В.А. Теория автоматического управления: [учебн. для вузов. 2-е изд., перераб. и доп.]. – М.: Недра, 1990. – 416 с.