|
|
| Русский | Українська | English |
 |
Магістр ДонНТУ
Факультет: «Комп'ютерних інформаційних технологій і автоматики» (КІТА) Кафедра: «Гірнича електротехніка і автоматика імені Р. М. Лейбова» (ГЕА) Спеціальність: «Автоматизоване управління технологічними процесами» (АУП) Тема кваліфікаційної роботи магістра: «Розробка та дослідження пристрою автоматичного управління пуском асинхронного електроприводу шахтного стрічкового конвеєра» Науковий керівник: к.т.н., доцент кафедри ГЕА |
|
Реферат
ВСТУП Конвеєрний транспорт є невід'ємним технологічним процесом гірничого підприємства. Його ефективність значно впливає на вуглевидобуток усього підприємства в цілому. Автоматизація конвеєрного транспорту передбачає підвищення ефективності процесу доставки шляхом зниження витрат на обслуговування та ремонти, а також за рахунок зменшення часу простою й збільшення продуктивності.
Метою автоматизації конвеєрного транспорту є підвищення ефективності та безпечності роботи конвеєрних ліній. Для досягнення цієї мети потрібно вирішити дві основні задачі:
З вищесказаного видно, що серед актуальних питань, що стосуються режимів роботи конвеєра й ефективної його експлуатації, лежить питання проблематики пуску. В існуючих пристроях плавного пуску (ППП) використовується фазове управління напруги, що подається, яке реалізовується тиристорним перетворювачем. Але при фазовому регулюванні на виході перетворювача виходить напруга поганої якості, при якомї пуск характеризується наявністю перехідних процесів як у електроприводі, так і в механічної частини конструкції. Перехідні процеси супроводжуються різкими змінами різних параметрів стану в часі, в тому числі і зусилля в стрічці. При цьому значення даної змінної можуть змінюватися в значній мірі, виходячи за межі допустимих або навіть критичних. Перевантаження при пуску конвеєра можуть призвести до небезпечного зниження запасу міцності приводу і стрічки. Тому, аналізуючи вищезазначене, можна зробити висновок що проблема плавного пуску дуже актуальна на сьогоднішній день. Це означає, що існує необхідність у пошуку альтернативних засобів управління напругою живлення асинхронних двигунів (АД) з короткозамкненим ротором. Однією з таких альтернатив є заміна принципу фазового регулювання – широтно-імпульсним регулюванням напруги. Відповідно до цього принципу силові ключі між джерелом живлення і навантаженням комутуються з високою частотою протягом періоду напруги живлення. Керована величина – тривалість включеного стану силового ключа при постійному значенні несучої частоти. Середнє значення вихідної напруги за період несучої частоти визначається скважностью імпульсів керування силовим ключем, а також миттєвими значеннями напруги живлення. Реалізація цього способу можлива при використанні транзисторів з ізольованим затвором (IGBT), які характеризуються високими енергетичними та динамічними показниками [1]. КРИТИЧНИЙ ОГЛЯД ВІДОМИХ ТЕХНІЧНИХ РІШЕНЬ З точки зору забезпечення вимог, що пред'являються до приводу стрічкових конвеєрів, цей привід має недоліки. До недоліків електропривода з асинхронним короткозамкненим електродвигуном слід віднести різке збільшення пускового моменту і, отже, можливість появи високих натягів в конвеєрній стрічці і пробуксовування на приводних барабанах. Значного поліпшення робочих характеристик електроприводу досягають включенням у схему приводу спеціальних пускових пристроїв: 1. Пускові гідромуфти замкнутого типу, що забезпечують плавний пуск і необхідний розподіл навантаження між двигунами багатодвигунних приводних станцій. Гідромуфти мають серйозні недоліки, тому що механічна характеристика гідромуфти не дозволяє здійснити розгін тягового органу конвеєра з необхідною інтенсивністю; спрацьовування захисту викликає небезпеку для обслуговуючого персоналу і простій конвеєра, обумовлений часом на повторну заливку в неї емульсії, встановлення нової плавкої пробки. 2. Електромагнітна муфта ковзання. До недоліків електромагнітних муфт ковзання належить таке: в процесі розгону конвеєра вихрові струми, що виникають в якорі муфти, викликають її сильне нагрівання, що вимагає, особливо при великій потужності приводу, досить складної системи охолодження муфти; індуктор, до якого підводиться постійний струм через кільця, повинен бути у вибухобезпечному виконанні, щоб відповідати умовам роботи у вибухонебезпечному атмосфері вугільних шахт; електропривод з електромагнітною муфтою ковзання і короткозамкненим асинхронним двигуном вимагає два види струму – змінного і постійного, що також ускладнює систему живлення приводу. Тому із зазначених причин роботи в області створення електромагнітних муфт ковзання для стрічкових конвеєрів в даний час не отримують розвитку. 3. Електродвигуни з фазним ротором. Забезпечення плавного пуску до таких електроприводах здійснюється введенням опору до ланцюгу ротора електродвигуна. В якості опору використовують металевий ступінчастий реостат або безступінчатий – рідинний. Рідинні реостати випускаються на широкий діапазон потужностей і виготовляються у вибухобезпечному виконанні, що дозволяє використовувати приводи цього типу у вугільних шахтах. He менш широке поширення отримав привід з електродвигуном з фазовим ротором і металевим реостатом, включеним до ланцюг ротора. Введення опорів здійснюють за допомогою електромагнітних контакторів. Існують також приводи з двигунами з фазовим ротором, у ланцюг якого включені некеровані індукційні реостати. Застосування даного методу має ряд таких недоліків, як зношування контактних кілець, великі втрати на регулювальному опорі, зменшення жорсткості характеристик з ростом опору, велика вартість відповідно двигуна з КЗ ротором. 4. Електропривод змінного струму на базі асинхронного двигуна з фазним ротором по системі асинхронного вентильного каскаду (АВК). Недоліки даної схеми – дороговизна реалізації та супутні недоліки двигуна з фазним ротором. 5. Схема імпульсного регулювання частоти обертання асинхронного двигуна з фазним ротором. Регулювання жорсткості механічної характеристики в даній схемі проводиться зміною опору в ланцюзі випрямленого струму імпульсним методом. У електроприводі стрічкового конвеєра з асинхронним короткозамкненим двигуном імпульсне регулювання струму можливо лише у статорному ланцюзі. Імпульсний метод управління асинхронним двигуном є найбільш простим і легко реалізовується. Однак цей метод має низку суттєвих недоліків. При такому способі регулювання має місце безперервне протікання перехідних процесів і пов'язане з цим протікання по обмотках двигуна вільних складових перехідних струмів, що обумовлюють нагрівання двигуна і поява знакозмінних ударних моментів, які погіршують якість перехідного процесу при пуску конвеєра. 6. Частотне регулювання асинхронного двигуна за допомогою перетворювача частоти (ПЧ). ПЧ забезпечує плавне регулювання частоти в необхідному діапазоні. Основний недолік ПЧ – це його дороговизна і великі габарити. 7. Параметричний метод управління асинхронним двигуном. При такому методі впливають на величину прикладеної до приводного двигуна напруги. Реалізується при пуску двигуна з короткозамкненим ротором двома основними методами: 1) Детермінованим фазування, тобто почерговим включенням статорних обмоток двигуна на мережу в моменти часу, що відповідають певній фазі живлячої напруги, що виключає появу апериодических складових пускового струму і дозволяє отримати динамічну механічну характеристику, близьку до статичної. 2) Плавним збільшенням по лінійному або експонентному закону напруги, що підводиться до двигуна. Повний час наростання напруги живлення при цьому має бути не менше часу загасання апериодической складової струму, тобто
де t н. – час наростання напруги живлення; Хк, rк – параметри короткого замикання схеми заміщення асинхронного двигуна; ω0 – кутова частота мережі. Пригнічення знакозмінних ударних моментів в значній мірі збільшує плавність пуску, а отже, довговічність і надійність роботи як електроприводу, так і тягового органу [2]. Вибухозахищені пристрої плавного пуску конвеєрів такого роду випускаються рядом зарубіжних фірм, серед яких провідне становище займають такі фірми, як «Hansen & Reinders», «Elgor & Hansen», «Hamacher» та інші. Вітчизняною промисловістю випускається два апарати плавного пуску АПМ-200 і УКТВ-400 (ЗАТ НВП «Макіївський завод шахтної автоматики») [5]. Так само в УкрНДІВЕ було створено вибухозахищене комплектний пристрій плавного пуску типу КУВПП-250УХЛ5. Відмінною особливістю зарубіжних пристроїв є те, що вони представлені у вигляді комплектних пристроїв у великих корпусах і для вітчизняних споживачів занадто дорого коштують. Апарат АПМ призначений для плавного пуску серійних та тих, що розробляються однодвігательних стрічкових конвеєрів і канатно-крісельних доріг, оснащених асинхронними двигунами з короткозамкненим ротором, а також для плавного динамічного гальмування електропривода стрічкового конвеєра після його відключення. Электрична схема аппарату забезпечує:
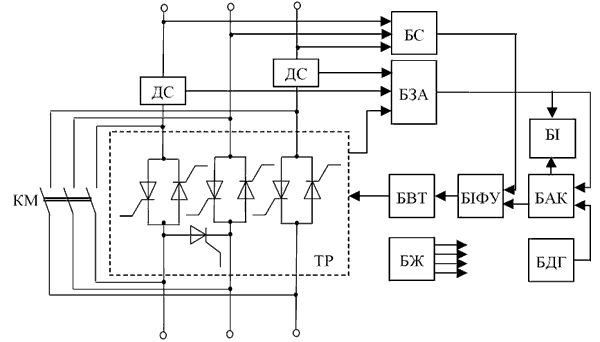
Апарат обладнаний контактором, який шунтує силові тиристори після завершення плавного пуску робочого органу конвеєра. При необхідності їм можна здійснити прямий пуск електродвигуна. Вартість апарату АПМ значно поступається вартості аналогічних закордонних пристроїв, які разом з його функціональністю робить апарат АПМ особливо привабливим для вітчизняних споживачів. Апарат виконаний у вибухозахищеної оболонці. Основою апарату є трифазний тиристорний регулятор (ТРН) (рис. 1), що складається з шести одноопераційних тиристорів. Сьомий тиристор забезпечує роботу приводного АД у режимі індукційно-динамічного гальмування. Тиристори розміщені на внутрішній поверхні кришки вибухозахищеної оболонки, які забезпечують відтік тепла в зовнішнє середовище. В основному відсіку розташований контактор КМ, який шунтує тиристори після завершення розгону двигуна. Крім цього в основному відсіку встановлені блоки вихідних трансформаторів (БВТ) для забезпечення гальванічної розв'язки, автоматичного керування (БАК), імпульсно-фазового управління (БІФУ) для формування імпульсів відмикання тиристорів, динамічного гальмування (БДГ), захисту апарату (БЗА) для захисту апарату від аварійних режимів роботи, синхронізації (БС) для синхронної роботи БІФУ, індикації (БІ), живлення (БЖ) для живлення блоків апарату, а також датчики струму, температури.
Рисунок 1 – Структурна схема апарату АПМ Таким чином, існуючі пристрої пристрої для плавного запуску асинхронних двигунів використовують фазовий принцип регулювання вихідної напруги – за рахунок формування заданих кутів α управління тиристорами. При цьому відключення силових ключів природне – при зниженні струму до нуля. Це дозволяє використовувати відносно недорогі одноопераційних тиристори, які характеризуються високими енергетичними показниками. Разом з очевидними перевагами (надійність, відсутність пристроїв штучної комутації) подібна система має істотні недоліки, які стосуються якості вихідних параметрів, впливу на живильне мережу і енергетичні показники приводу [3]. Вибухозахищене комплектний пристрій плавного пуску типу КУВПП-250УХЛ5, призначений для плавного пуску трифазних асинхронних двигунів з короткозамкненим ротором, що використовуються у приводі стрічкових конвеєрів та інших гірничих машинах у вугільних шахтах, небезпечних по газу або вугільного пилу. Пристрій забезпечує плавний пуск асинхронного електродвигуна з короткозамкненим ротором з регульованою тривалістю від 5 до 20 с. Пристрій допускає не більше чотирьох пусків з інтервалом 1 хв або до восьми пусків у годину за умовами нагрівання двигуна. У пристрої передбачена можливість перемикання на режим роботи без плавного пуску. При цьому пристрій працює як звичайний пускач. В основу роботи пристрою плавного пуску покладено принцип живлення трифазного асинхронного двигуна шляхом поступового збільшення напруги при пуску, забезпечуваного тиристорним перемикачем, що складається з шести тиристорів включених по два зустрічно-паралельно у кожній фазі живильної мережі. Тиристорний перемикач дозволяє плавно змінювати напругу при постійній частоті мережі за рахунок моменту відкривання тиристора. Управління швидкістю наростання вихідної напруги забезпечуються мікропроцесорним блоком управління (MK). Пусковий момент двигуна змінюється пропорційно квадрату напруги при фіксованій частоті. Плавне збільшення напруги виключає кидок струму у момент включення, при цьому також виключається механічний удар у системі двигун-редуктор гірничої машини. У програму мікропроцесора MK закладена функція контролю струму навантаження. Ця функція виконує захист від обриву фази, захист від перевантаження двигуна і підтримує кратність обмеження пускового струму по відношенню до номінального, що задається користувачем за допомогою перемикачів. MK виконаний у металевому корпусі. На його передній стінці є рідкокристалічний дисплей для відображення основних настроювань і параметрів. Програмування параметрів пуску здійснюється за допомогою багатопозиційних перемикачів, розташованих на задній стінці, за допомогою яких задаються наступні параметри:
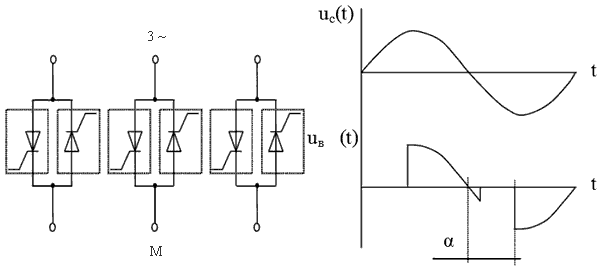
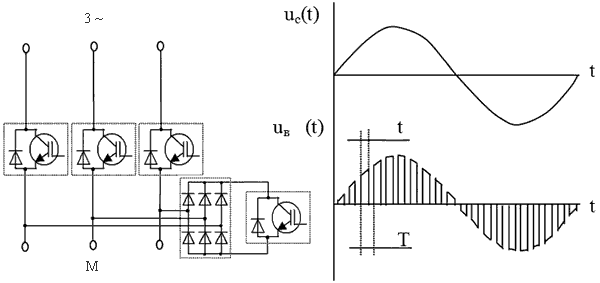
Тиристорний перемикач виконаний у вигляді модуля, що складається з шести тиристорів, встановлених на загальному радіаторі. Для примусового повітряного охолодження радіатор тиристорного перемикача забезпечений вентилятором. Контроль температури радіатора здійснюється напівпровідниковим датчиком, сигнал від якого передається в MK. Значення температури виводиться на дисплей. При нагріванні радіатора понад 80 °С MK відключає пристрій. У модулі є також плата трансформаторів, які забезпечують гальванічну розв'язку схеми управління тиристорами від силової і плата синхронізації схеми управління з кожною фазою мережі. У пристрої застосовані два вакуумних контактора. Контактор КМ1 шунтує тиристорний перемикач після закінчення розгону, щоб запобігти надмірне підвищення температури тиристорів в замкнутому просторі вибухонепроникної оболонки. Контактор КМ2 забезпечує у відключеному стані, в порівнянні з тиристорами, більш надійну ізоляцію відходить силового ланцюга. Алгоритм роботи МК побудований таким чином, щоб при виконанні команди «ПУСК» (проілюстровано на анімації) забезпечити бездуговую комутацію контакторів, тобто включається КМ2, відкриваються тиристори, включається КМ1, закриваються тиристори, відключається КМ2. При виконанні команди «СТОП» включається КМ2, відкриваються тиристори, відключається КМ1, закриваються тиристори, відключається КМ2 [4]. У результаті досліджень було вироблено моделювання процесів у АД при фазовому (рис. 3) і широтно-імпульсному (рис. 4) регулюванні напруги, що підводиться до двигуна.
Рисунок 3 – Принцип фазового регулювання змінної напруги Де: α – кут відмикання тиристора; T – період комутації; t – тривалість комутації; uвих – напруга на виході перетворювача; uс – напруга мережі
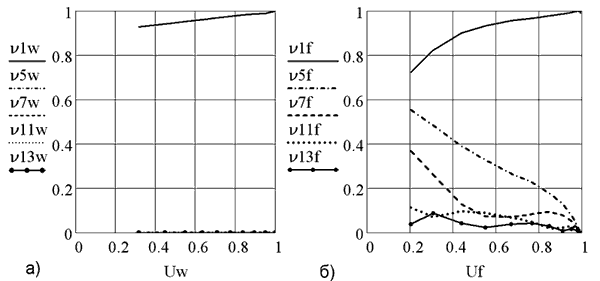
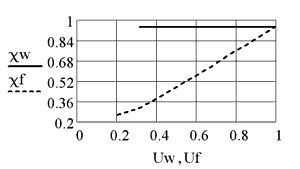
Рисунок 4 – Принцип широтно-імпульсного регулювання змінної напруги У результаті моделювання процесів у АД при фазному регулюванні було визначено, що споживаний струм на навантаженні відрізняється від синусоїдального і амплітуди 5-ї, 7-ї, 11-ї, 13-ї гармонік струму в порівнянні з 1-ю гармонійної складової, особливо при малих значеннях відносної напруги (рис. 5.б). Також виявляється суттєвий вплив на коефіцієнт потужності мережі (рис. 6). Все це негативно позначається на енергомеханічних показниках і термінів служби приводу.
Рисунок 5 – Залежність гармонійного складу струму АД від вихідної напруги при широтно-імпульсному регулюванні (а) і фазовому регулюванні (б) Де: v1w, v5w, v7w, v11w, v13w и v1f, v5f, v7f, v11f, v13f – 1-а, 5-а, 7-а, 11-а, 13-а гармонійні складові струму АД при широтно-імпульсному регулюванні і фазовому регулюванні відповідно; Uw, Uf – відносні значення напруги. Результати моделювання процесів у АД при широтно-імпульсному регулюванні показали, що амплітуди гармонік струму, крім 1-ї, пренебрежимо малі (рис. 5.а), що зумовлює значну близькість споживаного струму до синусоїди.
Рисунок 6 – Залежність коефіцієнта потужності мережі від вихідної напруги при широтно-імпульсному(χw) і фазовому регулюванні(χf) Все це і відсутність впливу на коефіцієнт потужності (рис. 6), дозволяє зробити висновок, що застосування широтно-імпульсного регулювання напруги у ППП дозволяє: наблизити регульований сигнал до синусоїдального, оптимізувати пусковий і гальмівної моменти для безударних розгонів і зупинок механізмів, що приводяться, подовжити термін використання підшипників, зубів коліс редукторів, стрічки і тощо [1]. У ході проведення дослідження були сформульовані основні вимоги до електроприводу стрічкового конвеєра, проаналізовано основні завдання автоматизації конвеєрного транспорту і висвітлена пробелема пуску. Був проведений огляд основних існуючих технічних рішень забезпечення плавного пуску стрічкового конвеєра. Дані рішення були проаналізовані з точки зору надійності, функціональності та економічної рентабельності, були підкреслені основні переваги та недоліки того чи іншого методу. Наприкінці роботи було розглянуто сучасні пристрої плавного пуску, були відзначені їх переваги та недоліки. Були представлені переваги застосування широтно-імпульсного регулювання перед фазовим регулюванням на основі результатів моделювання обох методів. Сформульована перспектива подальших досліджень.
При написанні даного реферату магістерська роботу ще не завершена. Дата остаточного завершення роботи: грудень 2011 Повний текст роботи та матеріали по темі можуть бути отримані у автора або його наукового керівника після зазначеної дати. |
© 2011 ДонНТУ Горбунов Є. Ю. |