Исследованы преимущества применения широтно-импульсного регулирования переменного напряжения в УПП привода ленточного конвейера.
Конвейерный транспорт является неотъемлемым технологическим процессом горного предприятия. Его эффективность оказывает значительное влияние на угледобычу всего предприятия в целом. Автоматизация конвейерного транспорта предусматривает повышение эффективности процесса доставки путём снижения затрат на обслуживание и ремонты, а также за счёт уменьшения времени простоя и увеличения производительности.
Целью автоматизации конвейерного транспорта является повышение эффективности и безопасности работы конвейерных линий. Для достижения этой цели требуется решить две основные задачи:
1) управление процессом пуска и останова конвейеров;
2) автоматическое регулирование производительности конвейеров для стабилизации грузопотока.
Как мы видим, среди актуальных вопросов, касающихся режимов работы конвейера и эффективной его эксплуатации, лежит вопрос проблематики пуска.
В существующих УПП используется фазовое управление подаваемого напряжения, реализуемое тиристорным преобразователем. Но при фазовом регулировании на выходе преобразователя получается напряжение плохого качества, при котором пуск характеризуется наличием переходных процессов, как в электроприводе, так и в механической части конструкции. Переходные процессы сопровождаются резкими изменениями различных параметров состояния во времени, в том числе и усилие в ленте. При этом значение данной переменной могут меняться в значительной степени, выходя за пределы допустимых или даже критических. Перегрузки при пуске конвейера могут привести к опасному снижению запаса прочности привода и ленты. Поэтому, анализируя вышеперечисленное, можно сделать вывод что проблема плавного пуска очень актуальна на сегодняшний день.
Это означает, что существует необходимость в поиске альтернативных средств управления напряжением питания асинхронных двигателей (АД) с короткозамкнутым ротором. Одной из таких альтернатив является замена принципа фазового регулирования – широтно-импульсным регулированием напряжения. В соответствии с этим принципом силовые ключи между источником питания и нагрузкой коммутируются с высокой частотой на протяжении периода напряжения питания. Управляемая величина – длительность включенного состояния силового ключа при постоянном значении несущей частоты. Среднее значение выходного напряжения за период несущей частоты определяется скважностью импульсов управления силовым ключом, а также мгновенными значениями напряжения питания. Реализация этого способа возможна при использовании транзисторов с изолированным затвором (IGBT), которые характеризуются высокими энергетическими и динамическими показателями.
На рисунках 1 и 2 приведены оба принципа регулирования:
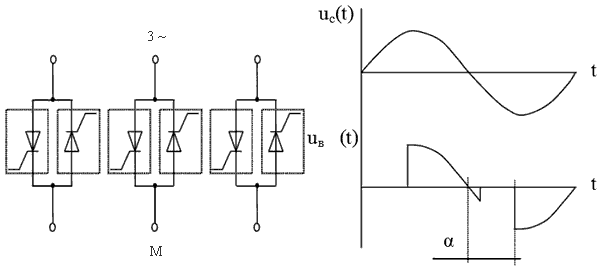
Рисунок 1 – Принцип фазового регулирования переменного напряжения
Где:
α – угол отпирания тиристора;
T – период коммутации;
t – длительность коммутации;
uвых – напряжение на выходе преобразователя;
uс – напряжение сети
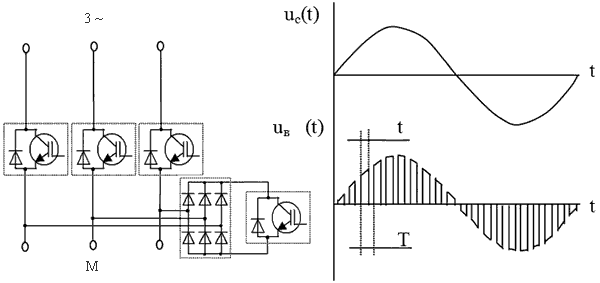
Рисунок 2 – Принцип широтно-импульсного регулирования переменного напряжения
В результате моделирования процессов в АД при фазном регулировании было определено, что потребляемый ток на нагрузке отличается от синусоидального и амплитуды 5-й, 7-й, 11-й, 13-й гармоник тока сопоставимы с 1-й гармонической составляющей, особенно при малых значениях относительного напряжения (рис. 3.б). Также оказывается существенное влияние на коэффициент мощности сети (рис. 4). Все это негативно сказывается на энергомеханических показателях и сроков службы привода.
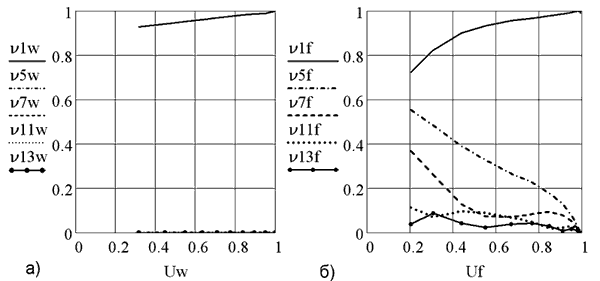
Рисунок 3 – Зависимость гармонического состава тока АД от выходного напряжения при широтно-импульсном регулировании (а) и фазовом регулировании (б)
Где:
v1w, v5w, v7w, v11w, v13w и v1f, v5f, v7f, v11f, v13f – 1-я, 5-я, 7-я, 11-я, 13-я гармонические составляющие тока АД при широтно-импульсном регулировании и фазовом регулировании соответственно;
Uw, Uf – относительные значения напряжения.
Результаты моделирования процессов в АД при широтно-импульсном регулировании показали, что амплитуды гармоник тока, кроме 1-й, пренебрежимо малы (рис. 3.а), что обуславливает существенную близость потребляемого тока к синусоиде.
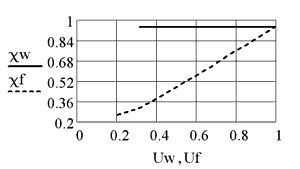
Рисунок 4 – Зависимость коэффициента мощности сети от выходного напряжения при широтно-импульсном(χw) и фазовом регулировании(χf)
Все это и отсутствие влияния на коэффициент мощности (рис. 4), позволяет сделать вывод, что применение широтно-импульсного регулирования напряжения в УПП позволяет: приблизить регулируемый сигнал к синусоидальному, оптимизировать пусковой и тормозной моменты для безударных разгонов и остановок приводимых механизмов, продлить срок использования подшипников, зубьев колес редукторов, ленты и т.д.
Литература
- Справочник по автоматизации шахтного конвейерного транспорта / Стадник Н.И. и др. К.: Техника, 1992. – 438с.
- Малиновский А.К. Автоматизированный электропривод машин и установок шахт и рудников: Учебник для вузов. – М: Недра, 1987. – 277с.
- Руденко В. С. Преобразовательная техника. Київ: Вища школа, 1983. – 431 с.
- Ставицкий В.Н., Маренич К.Н. Полупроводниковый преобразователь для автоматизиро-ванного электропривода горной машины. // Наукові праці Донецького національного технічного університету. Серія: обчислювальна техніка та автоматизація. Випуск 58. – Донецьк: ДонНТУ, 2003. – с. 122 – 129.
- Воронин П.А. Силовые полупроводниковые ключи: семейства, характеристики, применение. М: Издательский дом Додэка-XXI, 2001. – 384с.