Канатна відкатка застосовується як допоміжний засіб транспорту в похилих виробках при кутах нахилу від 6 до 80 градусів для доставки матеріалів, устаткування, видачі породи і перевезення людей. Невід'ємною частиною удосконалення однокінцевої відкатки є підвищення надійності та якості регулювання електроприводу.
Для зменшення динамічних перевантажень у трансмісії доцільним є виконання розгону за наперед визначеною діаграмою підвищення швидкості. Раніш виконаними дослідженнями встановлена доцільність застосування діаграми розгону у декілька етапів із поступовим підвищенням прискорення для електроприводів подібних технологічних машин [1]. З цією метою має бути застосований відповідний пристрій завдання швидкісного режиму привода.
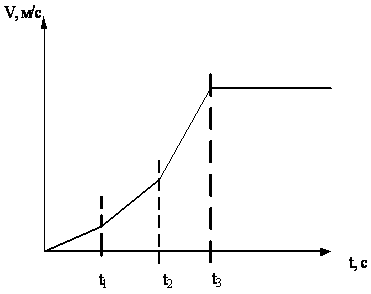
Задатчик інтенсивності розгону (ЗІР) моделює необхідну діаграму зміни швидкості приводу, формуючи напругу, що змінюється в часі за завданим законом. Діаграма зміни швидкості приводу наведена на рис. 1.
В основу роботи ЗІР покладена ідея керування зміною інтенсивності збільшення заданої швидкості привода у моменти проходження підйомною судиною відповідних місць на шляху пересування. Тобто, за умови формування імпульсів логічної «одиниці» від шляхових датчиків. На рис.1 виникненню цих імпульсів відповідають моменти часу t1 і t2.
Технічна реалізація вказаного алгоритму формування напруги заданої швидкості має бути виконана схемою (рис.2) на основі застосування інтегратора на операційному підсилювачі DA1. Налаштування інтегратору на відповідний темп зміни вихідної напруги (Uвих) відбуватиметься відповідними переключеннями у ланцюгах ємкісних зворотних зв’язків С1-С3.
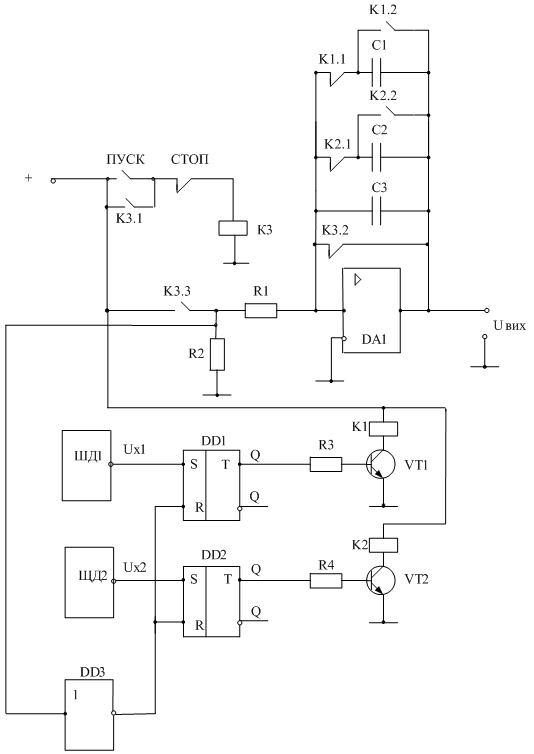
Отже у вихідному стані має бути виконане приєднання усіх трьох ємкостей С1-С3, а за командою шляхових датчиків ШД1, ШД2 ємкості, відповідно, С2 і С3 повинні бути відключені від вказаного паралельного приєднання і розряджені для повернення до вихідного стану.
Найпростіше, ці операції реалізуються контактною комутацією (контакти К1.1; К2.1 та К1.2; К2.2). Їхні реле комутуються транзисторними ключами VT1; VT2 за наявності логічних одиниць на виходах тригерів DD1; DD2, що запам’ятовують факти виникнення керуючих команд на виходах вищевказаних датчиків швидкості.
Команда на початок роботи приводу формується ввімкненням реле К3, відключений стан якого дозволяє повернути до вихідного стану тригери (через інвертор DD3) та групу конденсаторів (через контакт К3.2).
Параметр вихідної напруги розраховується за формулою [2]:
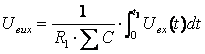
де  на інтервалі часу 0-t1;
на інтервалі часу 0-t1;
 на інтервалі часу t1 – t2;
на інтервалі часу t1 – t2;
 на інтервалі часу t2 – t3.
на інтервалі часу t2 – t3.
Таким чином, розроблена схема відповідає завданим вимогам щодо розгону електроприводу і тим самим сприяє підвищенню надійності і якості регулювання електроприводу.