При разработке систем автоматического регулирования актуальной задачей является использование таких алгоритмов управления, которые включали бы какую-либо функцию, ограничивающую выходной сигнал. Выходной сигнал регулятора должен иметь ограниченную амплитуду по крайней мере по двум причинам: во-первых, амплитуда выходного сигнала не может превышать диапазон цифро-аналогового преобразователя на выходе компьютера; во-вторых, рабочий диапазон исполнительного механизма всегда ограничен, клапан нельзя открыть больше, чем на 100%, на двигатель нельзя подавать неограниченный ток и напряжение. Таким образом, существуют нелинейности, которые все же следует учитывать явно. В системах управления производственными процессами часто используются регулирующие клапаны, которые представляют собой нелинейности типа насыщения, когда верхняя и нижняя границы соответствуют полностью открытому или полностью закрытому положениям (рис. 1).
 |
Уравнение нелинейного элемента типа насыщение представлено формулой (1):
 |
Интегральное насыщение представляет собой эффект, который наблюдается, когда ПИ- или ПИД-регулятор в течение длительного времени должен компенсировать ошибку, лежащую за пределами диапазона управляемой переменной, поскольку выход регулятора ограничен, ошибку сложно свести к нулю.
Если ошибка управления длительное время сохраняет знак, величина интегральной составляющей регулятора становится очень большой. Это, в частности, происходит, если управляющий сигнал ограничен настолько, что расчетный выход регулятора отличается от реального выхода исполнительного механизма. Так как интегральная часть становится равной нулю лишь некоторое время спустя после того, как значение ошибки изменило знак, интегральное насыщение может привести к большому перерегулированию [1].
Величина интегральной составляющей ПИ-регулятора пропорциональна площади, ограниченной переходной характеристикой и заданным значением . Если ошибка положительна, интегральный член будет возрастать; в противном случае он уменьшается. Пока управляющий сигнал неограничен, насыщение отсутствует. Если управляющий сигнал ограничен, реакция становится более медленной и интегральная часть увеличивается до тех пор, пока ошибка не изменит знак при . Однако даже после изменения знака ошибки управляющий сигнал остается большим и положительным в течении длительного времени, что приводит к значительному перерегулированию по .
Следовательно, для улучшения качества функционирования системы автоматического регулирования необходимо учитывать наличие ограничений, связанных с нелинейностями в системе. Задачу синтеза системы с ограничениями в виде неравенств на управляющее воздействие можно решить тремя методами:
- принцип максимума;
- динамическое программирование;
- инженерные методики.
Принцип максимума ориентирован на определение программного оптимального управления. Задача оптимального управления сводится к отысканию таких управлений, удовлетворяющих наложенным ограничениям, которые одновременно с переводом объекта (системы) из одного положения в другое обеспечивают экстремум выбранного функционала качества. Принцип максимума – необходимое и достаточное условие оптимальности только для линейных объектов. Для общего случая нелинейных объектов он является только необходимым. Это означает, что с его помощью находится не оптимальное управление, а некоторая суженная группа допустимых управлений, только среди которых может быть искомое оптимальное управление, если оно вообще существует. Нахождение последнего должно производиться далее, например, перебором.
Динамическое программирование, наряду с принципом максимума, является основным математическим методом, с помощью которого определяется оптимальное управление. В отличие от принципа максимума, который формулируется таким образом, что оказывается ориентированным, прежде всего, на определение оптимального управления в виде оптимальной программы, динамическое программирование позволяет определить оптимальное управление только в форме синтезирующей функции. Решение задач синтеза оптимальных систем с помощью динамического программирования численными методами требует такого объема вычислительной работы, которая в настоящее время посильна только современным вычислительным комплексам с большим объемом оперативной памяти (типа RS-6000/42T) [2].
Основное внимание в данной статье уделяется инженерным методикам. При обзоре существующих инженерных методик было выделено 3 подтипа:
I. Методика по расчету настроек регулятора;
II. Методика условного интегрирования;
III. Методика с компенсацией интегрального насыщения.
I. Экспресс-метод расчета настроек ПИ-регулятора позволяет непосредственно определять настройку системы с учетом требуемого ограничения на максимальную величину регулирующего воздействия. В основу этого метода положены формулы для расчета параметров динамической настройки ПИ-регулятора для отработки задающего сигнала путем полной компенсации большей постоянной времени. Так как максимальная величина перемещения регулирующего органа пропорциональна коэффициенту усиления регулятора, то для ограничения величины максимального регулирующего воздействия при отработке АСР задающих воздействий необходимо уменьшить коэффициент усиления регулятора. Для определения параметров настройки пропорциональной составляющей регулятора используются номограммы [3].
II. Суть методики условного интегрирования состоит в следующем: пока ошибка достаточно велика, ее интегральная часть не требуется для формирования управляющего сигнала, а для управления достаточно пропорциональной части. Интегральная часть, используемая для устранения стационарных ошибок, необходима только в тех случаях, когда ошибка невелика. При условном интегрировании эта составляющая учитывается в окончательном сигнале, только если ошибка не превосходит определенного порогового значения. При больших ошибках ПИ-регулятор работает как пропорциональный регулятор. Выбор порогового значения для активизации интегрального члена – далеко не тривиальная задача. В аналоговых регуляторах условное регулирование можно выполнить с помощью диода Зинера (ограничителя), который подключается параллельно с конденсатором в цепи обратной связи операционного усилителя в интегрирующем блоке регулятора. Такая схема ограничивает вклад интегрального сигнала [1].
III. Методика разработки систем автоматического управления с компенсацией интегрального насыщения состоит в выполнении двухшаговой процедуры:
1). Разработать систему автоматического регулирования, предполагая, что линеаризованная модель адекватно отображает динамику реальной замкнутой системы;
2). Дополнительная нелинейная обратная связь разрабатывается с целью улучшения реакции до тех пор, пока не будут выполнены требования к системе.
Для более подробного рассмотрения существующих алгоритмов компенсации интегрального насыщения были составлены модели в среде визуального программирования Simulink пакета MatLab:
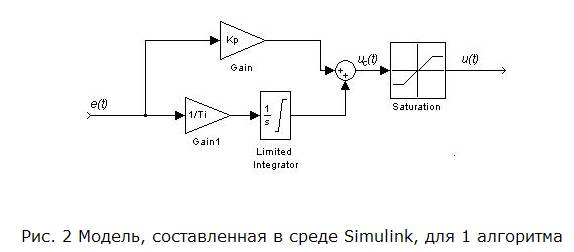
Алгоритм 1. В регуляторе используется интегратор с фиксатором выходного сигнала. Эта схема просто включает в себя фиксацию выходного сигнала интегратора на определенном максимальном уровне (рис.2).
 |
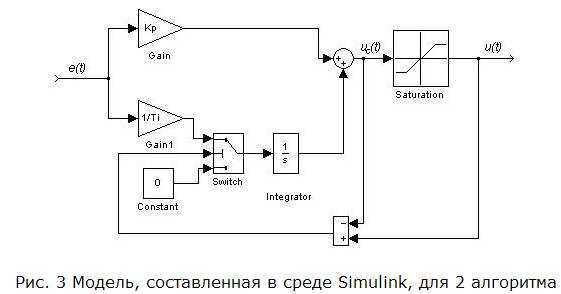
Алгоритм 2. Отключение интегратора при насыщении. Эта схема включает в себя отключение входа интегратора при насыщении исполнительного механизма (рис. 3).
 |
Алгоритм 3. Нелинейная коррекция. Регулятор состоит из обычного интегратора в прямой цепи и нелинейности типа зоны нечувствительности в цепи обратной связи интегратора (рис. 4) [4].
 |
Алгоритм 4. Обратная связь по насыщению. Эта схема включает дополнительную обратную связь, которая уменьшает вход интегратора пропорционально ошибке насыщения (рис. 5). На вход интегратора подается сигнал , который вычисляется по формуле (2):
 |
Алгоритм 5. Обратная связь по насыщению. На вход интегратора подается сигнал (рис. 6), который вычисляется по формуле (3):
 |
Пример:
Рассмотрим работу 3, 4 и 5 алгоритмов компенсации интегрального насыщения на примере системы автоматического регулирования температурой первичного пара парогенератора ТП-100 блока 200 МВт. Температура перегрева пара на выходе парового котла относится к важнейшим параметрам, определяющим надежность и экономичность работы паровой турбины и энергоблока в целом, поэтому предъявляются высокие требования к качеству регулирования этого параметра.
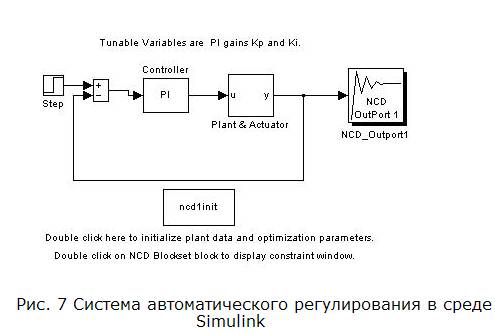
1) Рассчитаем оптимальные настройки ПИ-регулятора для линейной системы автоматического регулирования. Для определения оптимальных параметров используем стандартный пакет NCD Blockset, предназначенный для настройки параметров модели методом численной оптимизации по переходному процессу [5].
В среде Simulink смоделируем систему автоматического регулирования, которая представлена на рисунке 7.
 |
В блоке NCD установим ломаными линиями область, из которой не должен выходить переходный процесс (рис. 8).
К переходному процессу по каналу задание-выход предъявлялись следующие требования:
-Максимальное перерегулирование – не более 20 %;
-Время нарастания – не более 350 с.;
-Длительность переходного процесса – не более 600 с.
Перед моделированием задаемся начальными значениями параметров регулятора, в меню Optimization указываем переменные, которые необходимо оптимизировать. Переходный процесс до и после оптимизации представлен на рис. 8.
 |
2) Далее введем ограничения на управляющую величину и дополним систему алгоритмом компенсации интегрального насыщения. Для определения численных значений параметров из 3, 4 алгоритмов и , из 5 алгоритма воспользуемся пакетом NCD Blockset, в котором для решения этой задачи используются процедуры нелинейной оптимизации с ограничениями из пакета Optimization Toolbox. После нахождения искомых настроек в среде Simulink была смоделирована система автоматического регулирования температуры перегретого пара с ограничениями на управляющую величину, также было проведено сравнение работы алгоритмов компенсации интегрального насыщения на примере рассматриваемой АСР. Результаты математического моделирования представлены на рисунках 9 и 10, и сведены в таблицу 1.
 |
1 – АСР без механизма компенсации интегрального насыщения; 2 – АСР с механизмом компенсации интегрального насыщения по 4 алгоритму; 3 - АСР с механизмом компенсации интегрального насыщения по 5 алгоритму; 4 - АСР с механизмом компенсации интегрального насыщения по 3 алгоритму.
 |
1 – АСР без механизма компенсации интегрального насыщения; 2 – АСР с механизмом компенсации интегрального насыщения по 4 алгоритму; 3 - АСР с механизмом компенсации интегрального насыщения по 5 алгоритму; 4 - АСР с механизмом компенсации интегрального насыщения по 3 алгоритму.
 |
Из проведенных исследований и анализа полученных переходных процессов можно сделать следующие выводы: - если регулятор не учитывает насыщение исполнительного механизма, то при достижении управляющего воздействия ограничений, увеличивается время регулирования , динамическая ошибка и перерегулирование . - если в систему автоматического регулирования ввести алгоритм учета ограничений, то значительно повышается качество регулирования: по каналу задание-выход – уменьшилось время регулирования в 1,37 с использованием 4 и 5 алгоритмов, в 2,42 для 3 алгоритма; уменьшилось перерегулирование в 1,46 для 4 алгоритма, в 1,72 для 5 алгоритма, для 3 алгоритма перерегулирование отсутствует; по каналу возмущение-выход – уменьшилось время регулирования в 1,8, 1,6 и 1,46 с использованием 4, 5 и 3 алгоритмов соответственно; уменьшилась динамическая ошибка в 1,18, 1,24 и 1,3 с использованием 4, 5 и 3 алгоритмов соответственно. Использование алгоритмов компенсации интегрального насыщения имеют следующие достоинства: реализация метода не требует мощных вычислительных средств и значительно улучшается качество регулирования. При разработке систем автоматического регулирования следует учитывать наличие некоторых нелинейностей и использовать алгоритмы учета ограничений в зависимости от доступных технических средств автоматизации, сложности процесса и технологических требований к нему. Перспективным является использования методов компенсации интегрального насыщения в самонастраивающихся системах автоматического управления с использованием алгоритмов адаптации и идентификации [6].
Литература
1. Густав Олсон, Джангуидо Пиани. Цифровые системы автоматизации и управления. – СПб.: Невский диалект, 2001. – 557 с.;
2. Попов П.М., Ляшко Ф.Е. Оптимальное управление в ходе эволюционного развития процессов и систем: Учебное пособие. – Ульяновск: УлГТУ, 2000. – 148 с.;
3. Кулаков Г.Т. Инженерные экспресс-методы расчета промышленных систем регулирования: Спр. пособие. – Мн.: Выш. шк., 1984. – 192 с.;
4. Richard C. Dorf, Robert H Bishop. Modern control Systems (10th Edition): Prentice Hall, 2004. – 830 р.;
5. Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6 в математике и моделировании. Серия «Библиотека профессионала». – М.: СОЛОН-Пресс, 2005. – 576 с.;
6. Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива// Автоматика, автоматизация, электротехнические комплексы и системы. - 2007. - №1(19). – С.136-140.