
Гапечкін Антон Ігорович
Факультет комп'ютерних наук і технологій
Кафедра комп'ютерної інженерії
Спеціальність: Комп'ютерні системи та мережі
Тема випускної роботи:
Аналіз поведінки рухомого обекта в замкнутому просторі
Науковий керівник: Мальчева Раїса Вікторівна
Науковий консультант: Кривошеєв Сергій Васильович
Реферат
Содержание
Актуальність теми
Наукова значимість роботи
Практична цінність результатів роботи
Динамічне позиціювання
Системи управління
Математична модель
Оптимальна оцінка стану
Методи визначення координат об'єкту
Висновок
Примітка
Список литературы
Вступ
Сучасний технічний прогрес в області інформаційних технологій істотно розширює тактико-технічні можливості рухомих об'єктів різного
призначення. Значну роль у цьому процесі відіграє вирішення завдань орієнтації та навігації об'єктів на новому якісному рівні. Системи, вирішальні на
борту ці завдання, об'єднуються в інформаційно-керуючі комплекси орієнтації та навігації (КОН). Поряд з оптимізацією керуючої частини КОН, загальним
напрямком їх розвитку в останні десятиліття є істотне підвищення точності і надійності визнано інформаційні параметри орієнтації та навігації, тобто
вдосконалення інформаційної частини КОН. Ці обставини багато в чому визначають зростання ефективності та безпеки експлуатації рухомих об'єктів[1].
Необхідність створення КОН як комплексів, в яких результат значною мірою досягається за рахунок забезпечення надмірності інформації, оптимізації її
обробки, оптимізації керуючої частини, обумовлено тим, що тільки конструктивно-технічні шляхи вирішення завдань орієнтації і навігації на сучасному
рівні вимог, часто ведуть до надзвичайних витрат, а темпи їх впровадження істотно нижче необхідних темпів нарощування інформаційного забезпечення. У
той же час, іншим основоположним фактом у розвитку КОН є перехід до ресурсозберігаючих технологій, що дозволяє одержати істотний виграш в масогабаритних
характеристиках апаратури, знизити її вартість, енергоспоживання і підвищити надійність. Тут один з основних шляхів вирішення - мініатюризація датчиків,
стосовно інерціальним системам найбільш яскраво відбивається у переході там, де це доцільно, до мікромеханічних інерціальним чутливим елементам. Одночасно
удосконалюються і технології перспективних макродатчіков КОН, зокрема інерційних чутливих елементів і гравіінерціальніх вимірників.
У більшості випадків інформаційним ядром сучасних і перспективних КОН є біс платформна навігаційна система, комплектіруемая з супутниковою навігаційною
системою. Такий підхід найбільш повно проявляється, зокрема, в КОН авіаційного застосування, досвід проектування яких широко використаний в монографії.
Актуальність теми
Завдання обчислення координат рухомого об'єкта актуальна, тому що в даний час потрібна висока точність і достовірність положення об'єкта. У зв'язку з цим ведуться дослідження з поліпшення систем навігації та виведення їх на новий, більш високий рівень.
Наукова значимість роботи
Наукова значимість даної роботи полягає в розробці більш точного методу визначення координат рухомого об'єкта і утримання його в певному просторі.
Практична цінність результатів роботи
У ході виконання роботи після проведення моделювання з покращеними методами передбачається одержати більш оптимальний і достовірний метод
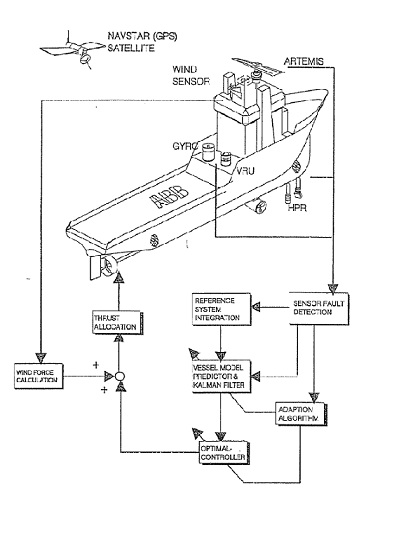
визначення координат і утримання об'єкта в обмеженому просторі. Узагальнена структура КОН у вигляді п'яти взаємопов'язаних функціональних модулів (Рис.1):
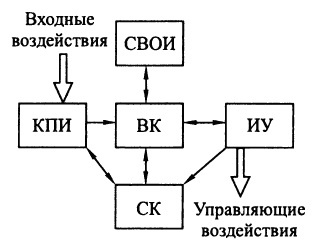
У наведеній структурі інформаційною основою КОН є комплекс систем-джерел первинної інформації (КПІ), що вимірюють різні параметри руху і стану об'єкта і передають цю інформацію в аналоговому або цифровому вигляді в обчислювальний комплекс (ВК). На Рис.1.2 позначено: СВОЇ - засоби введення і відображення інформації. CK - засоби контролю підсистем КОН і керованого об'єкта. ІУ - виконавчі пристрої.
Динамічне позиціювання
Системи динамічного позиціонування відкрили нові можливості для інтенсивного розвитку морських досліджень, результати яких складають
необхідну наукову базу для всіх видів використання і освоєння Світового океану. Залежно від глибини проведення робіт в даний час застосовують в основному
два способи утримання судів у заданому положенні: статичні системи позиціонування (якірні системи утримання) і системи динамічного позиціонування.
Суду, що володіють високою мобільністю, незамінні при виконанні робіт з розвідки родовищ нафти і газу на значних площах морів, коли потрібно часта зміна
району робіт. При глибинах понад 200 м на судах, як правило, використовуються динамічні системи позиціонування, що забезпечують досить швидку й просту
постановку на задану точку, можливість відходу з позиції при погіршенні гідрометеорологічних умов і високу точність утримання судна на місці. Динамічне
позиціювання може здійснюватися автоматично, напівавтоматично або вручну за допомогою команд оператора з пульта управління системи динамічного
позиціонування. За кордоном провідне положення по розробці систем динамічного позиціонування займають Норвегія і Франція. Вперше така система була
створена французькою фірмою і встановлена в 1964 р. на дослідному судні "Terebel". У США розробкою систем динамічного позиціонування займається фірма
"Honeywell". Система цієї фірми вперше була встановлена на буровому судні "Glomar Challenger", побудованому в 1968 р. Досвід експлуатації цих систем на
суднах "Terebel" і "Glomar Challenger" показав їх високу ефективність. Суду утримувалися в заданій точці при дії вітру і течії з точністю до 3-6% від
глибини[2,3].
"Еврика" був першим у світі з автоматичним управлінням динамічного позиціонування судна. Це був полупогружной, побудований нафтовою компанією «Шелл» для
розвідувального буріння і почав свою роботу навесні 1961 року. З одним двигуном потужність для кожного зі своїх 400 тонн переміщення, він був дуже
успішним у прийнятті ядер до 150 м у морське дно. Усереднення по два місця в добу, вона пробурена до дев'яти в один день на глибині з до 1200 р.
Так як це перша операція динамічної системи позиціонування, вони пройшли довгий шлях. Старі аналогові (одного потоку системи) потім пішли і цифрові
комп'ютери представлені в двох, а потім і потрійним резервуванням. Частота відмов пройшли шлях від кількох на місяць і більш ніж 20 відсотків простою в
перший рік, на сьогоднішній день середній час напрацювання на відмову (MTBF), близько трьох років для кращих систем.
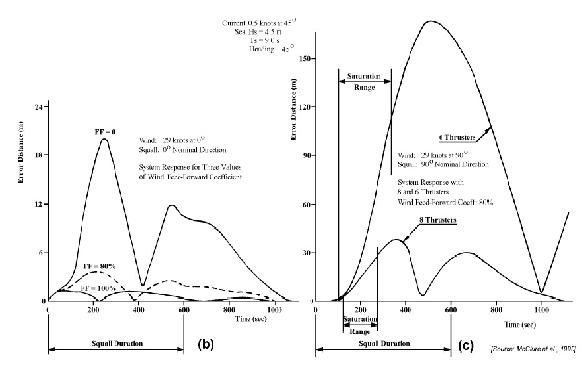
Розвиток успіху системи динамічного позиціонування потребує коштів для перевірки продуктивностей всієї системи від контролю для реакції судна навколишнього
середовища і двигуна сил на корпус. Повне моделювання дасть продуктивність системи за допомогою математичного аналізу, перш ніж будь-яке обладнання було
придбано. Тоді за допомогою детального тренажера системи, можна змінювати параметри управління системою, апаратні характеристики, дизайн гвинта або
навіть конструкції корпусу, щоб отримати ті або необхідної ефективності в мінливих умовах, а також у відповідь на раптову відмову від компонент системи.
Системи управління
Системи динамічного позиціонування, в основному, це положення судна по відношенню до наміченої позиції і спрямовує силу різних двигунів,
щоб виправити будь-які помилки позиції. Без будь-якої модуляції тяги та надання "мертвої зони", система буде постійно перерегулювати. Напевно, найпростіша
практична система складається з тяги і моменту команди пропорційній (Р) на суму розташування та напрямки помилки:

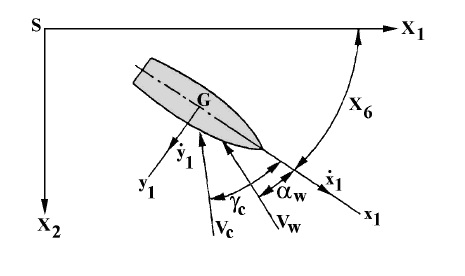
Діаграма осей системи наведена на рис 4.1, з початком координат, S, із земних осей в системі входить як і раніше поверхні води.
Математична модель
Для динамічного позиціонування плавуча споруда, не тільки горизонтальні рухи низької частоти хвилі (К = 1), вплив (K = 2) і рискання
(К = 6) представляють інтерес. Двигун сили повинні балансувати і приймати хвилі, поточні та вітрові навантаження. Крім того, xЎ і Xf, є повільно мінливими
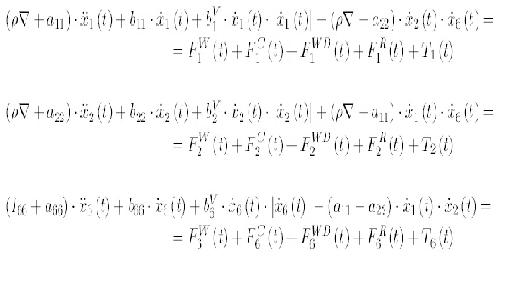
структури. Залишилось високочастотні рух хвиль, які інтегрувалися або відфільтрувати. Загальний вигляд трьох нелінійних пов'язаних (Ейлера) рівняння руху
в горизонтальній площині на хвилю, гойдатися і нишпорення судна DP - з осями системи визначається за формулою:
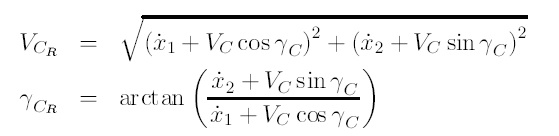
Відносна швидкість води і напрямки:
Оптимальна оцінка стану
Перш ніж розробляти систему управління динамічного позиціонування необхідно обчислити оцінку станів шумів. Зазвичай це робиться шляхом застосування наповнювача оцінками стану Кальман і позначаються Xl, Xh, Xc1, Xw.
Методи визначення координат об'єкту
Псевдодальномірній метод.
Сутність псевдодальномерного методу полягає у визначенні відстаней між навігаційними супутниками і споживачем і подальшим розрахунком координат
споживача. Для розрахунку трьох координат споживача псевдодальномерним методом необхідно знати відстані між споживачем і мінімум трьома навігаційними
супутниками. Ці відстані вимірюються між фазовими центрами передавальної антени навігаційного супутника і приймальної антени споживача. Вимірювання
відстаней між i-тим навігаційним супутником і споживачем називається псевдодальності до i-му супутнику. Псевдодальності, взагалі кажучи, також є
розрахунковою величиною і обчислюється як добуток швидкості розповсюдження електромагнітних коливань і часу, протягом якого сигнал супутника по трасі
"супутник - споживач" досягне споживача. Цей час вимірюється в апаратурі. Виміряна псевдодальності до i-му навігаційного супутника визначається за
формулою:
Рівняння (1) можна записати через координати i-го супутника і координати споживача за формулою:

Диференціальний метод.
Диференціальний метод визначення координат використовується для підвищення точності навігаційних визначень, які виконуються в апаратурі споживача. В основі
диференціального методу лежить знання координат опорної точки або системи опорних точок, за якими можуть бути обчислені поправки до визначення псевдо
навігаційних супутників. Якщо ці поправки врахувати в апаратурі споживача, то точність розрахунку, зокрема, координат може бути підвищена в
десятки разів.
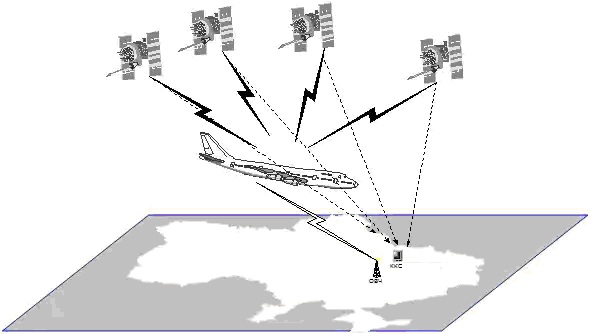
Апаратура, що входить до складу наземного функціонального доповнення складається з контрольно-коригуючих станцій, ОВЧ каналу передачі даних відповідно з
малюнком 5. Бортовий навігаційний GNSS приймач і приймач ОВЧ сигналів встановлені на борту рухомого об'єкта[4,5].
Різниця між розрахунковою і виміряної псевдодальності є поправка псевдодальності відповідного навігаційного супутника. Облік в апаратурі споживача цієї різниці і дозволяє підвищити точність навігаційних визначень. У практичних системах споживачеві передається швидкість зміни поправок псевдодальності, із застосуванням яких проводиться розрахунок скоригованих псевдо.
Висновок
Виконані дослідження, результати яких викладені роботі, дозволяють вирішити актуальну задачу формування математичної моделі судна,
обладнаного СДП, на ранніх стадіях дослідного проектування. До найбільш істотних можна віднести наступні результати роботи[6]:
1. Аналітичні описи гідроаеродінамічніх характеристик судна.
2. Математіческую модель незмінної частини системи керування динамічним позиціонуванням судна, що дозволяє:
- Забезпечити перевірку обгрунтованості прийняття попередніх рішень;
- Сприяти формуванню необхідної бази даних для автоматизації проектування і накопичення особистого досвіду проектувальника;
- Послужити основою для розробки математичного забезпечення автоматизованої системи дослідного проектування СДП;
- Удосконалити процес розробки СДП, знизити трудовитрати і час на проектування;
- Підвищити ефективність розроблюваної моделі.
3. Головний алгоритм керування динамічним позиціонуванням, що визначає основні обчислювальні операції обчислювального пристрою.
4. Функціонально-принципову схему СДП, яка визначає необхідні функціональні елементи системи і характер взаємних зв'язків між ними.
5. Вимоги до вимірювальної підсистеми СДП, загалом, і до вимірників, зокрема, які визначають склад і структуру функціональної схеми вимірювальної підсистеми.
6. Методику формування математичної моделі незмінної частини системи керування динамічним позиціонуванням судна на етапі дослідного проектування.
(анимація: 124 Кб, 3 кадра, затримка 3с, повтор кадрів 4 рази)
З використанням розробленої методики виконано імітаційне моделювання судна, обладнаного СДП. Результати моделювання практично підтвердили вірність методики. Виконані дослідження переконливо показали реальну можливість сформувати математичну модель судна, обладнаного СДП, в умовах неповної і неточної інформації, коли об'єкт управління реально ще не існує, а інформація про систему мінімальна[7].
Примітка
При написанні даного реферату випускна робота магістра ще не завершена. Дата остаточного завершення роботи: 1 грудня 2011 Повний текст роботи та матеріали по темі роботи можуть бути отримані у автора або його наукового керівника після зазначеної дати.
Список джерел
-
Структура и принципы работы систем динамического позиционирования
Источник:http://vestnik.mstu.edu.ru/v12_2_n35/articles/12_barak.pdf
-
"Offshore hydromechanics", First Edition. J.M.J. Journee and W.W. Massie. Delft University of Technology. 2001y.;
-
"Guidance and Control of Ocean Vehicles", Fossen Thor I., 1994.
-
Lecture Notes:TTK4190 Guidance and Control, Ivar Ihle, NUST, Norway, 2006;
-
"Marine Control Systems", Fossen Thor I., 2002.
-
Петров Ю.П., Червяков В.В. Системы стабилизации буровых судов. Л., Судостроение, 216 с., 1985.
-
Гофман А.Д. Движительно-рулевой комплекс и маневрирование судна: справочник. Л., Судостроение,360 с., 1988.