Структура и принципы работы систем динамического позиционирования
Барахта А.В., Юдин Ю.И.
Судоводительский факультет МА МГТУ, кафедра судовождения
Источник: http://vestnik.mstu.edu.ru/v12_2_n35/articles/12_barak.pdf
Введение
Запасы природных ресурсов в Арктике и прилегающих к ней северных районах велики и разнообразны. Очевидна важность задачи освоения морских углеводородных запасов для дальнейшего устойчивого развития экономического потенциала государства. Исследование, освоение и разработка ресурсов Мирового океана, в особенности шельфа арктических морей, требует решения ряда научно - технических проблем: совершенствования систем управления, обеспечивающих удержание судна на заданной точке с более высокой надежностью и точностью, стабилизирующих движителей значительно большей мощности, технических средств, используемых для разведки и освоения месторождений углеводородов. Существует необходимость в подготовке высококвалифицированных специалистов, способных управлять судами, оборудованными системами динамического позиционирования, использовать современные навигационные и вспомогательные комплексы, обеспечивать безопасность мореплавания в сложных гидрометеорологических условиях северных морей.
Область применения систем динамического позиционирования
Для разработки и освоения морского шельфа России требуются специализированные суда. В соответствии с производственными задачами и принятыми определениями Российского морского регистра судоходства специализированный флот может быть представлен следующими типами судов: научно-исследовательские – суда, осуществляющие поиск и разведку с оценкой эффективности эксплуатации нефтегазовых месторождений и определяющие природно-климатические условия в районе строительства, а также условия обустройства морского нефтегазопромысла; технические – суда, осуществляющие производственные процессы при разведывательном и эксплуатационном бурении, строительстве и обустройстве, технической эксплуатации и ликвидации морского нефтегазопромысла; суда обеспечения подводно-технических работ – это суда и подводные аппараты, обеспечивающие выполнение водолазных и ремонтных работ на всех этапах освоения и эксплуатации нефтегазопромыслов; служебно-вспомогательные суда – совокупность судов, обслуживающих и обеспечивающих эксплуатацию производственных объектов нефтегазопромыслов. Безопасное, эффективное и высокоточное выполнение поставленных задач при эксплуатации всех вышеперечисленных судов стало возможным только благодаря внедрению и использованию систем динамического позиционирования. Системы динамического позиционирования открыли новые возможности для интенсивного развития морских исследований, результаты которых составляют необходимую научную базу для всех видов использования и освоения Мирового океана. В зависимости от глубины проведения работ в настоящее время применяют в основном два способа удержания судов в заданном положении: статические системы позиционирования (якорные системы удержания) и системы динамического позиционирования. Суда, обладающие высокой мобильностью, незаменимы при выполнении работ по разведке месторождений нефти и газа на значительных площадях морей, когда требуется частая смена района работ. При глубинах свыше 200 м на судах, как правило, используются динамические системы позиционирования, обеспечивающие достаточно быструю и простую постановку на заданную точку,Для разработки и освоения морского шельфа России требуются специализированные суда. В соответствии с производственными задачами и принятыми определениями Российского морского регистра судоходства специализированный флот может быть представлен следующими типами судов: научно-исследовательские – суда, осуществляющие поиск и разведку с оценкой эффективности эксплуатации нефтегазовых месторождений и определяющие природно-климатические условия в районе строительства, а также условия обустройства морского нефтегазопромысла; технические – суда, осуществляющие производственные процессы при разведывательном и эксплуатационном бурении, строительстве и обустройстве, технической эксплуатации и ликвидации морского нефтегазопромысла; суда обеспечения подводно-технических работ – это суда и подводные аппараты, обеспечивающие выполнение водолазных и ремонтных работ на всех этапах освоения и эксплуатации нефтегазопромыслов; служебно-вспомогательные суда – совокупность судов, обслуживающих и обеспечивающих эксплуатацию производственных объектов нефтегазопромыслов. Безопасное, эффективное и высокоточное выполнение поставленных задач при эксплуатации всех вышеперечисленных судов стало возможным только благодаря внедрению и использованию систем динамического позиционирования. Системы динамического позиционирования открыли новые возможности для интенсивного развития морских исследований, результаты которых составляют необходимую научную базу для всех видов использования и освоения Мирового океана. В зависимости от глубины проведения работ в настоящее время применяют в основном два способа удержания судов в заданном положении: статические системы позиционирования (якорные системы удержания) и системы динамического позиционирования. Суда, обладающие высокой мобильностью, незаменимы при выполнении работ по разведке месторождений нефти и газа на значительных площадях морей, когда требуется частая смена района работ. При глубинах свыше 200 м на судах, как правило, используются динамические системы позиционирования, обеспечивающие достаточно быструю и простую постановку на заданную точку,
Структура систем динамического позиционирования
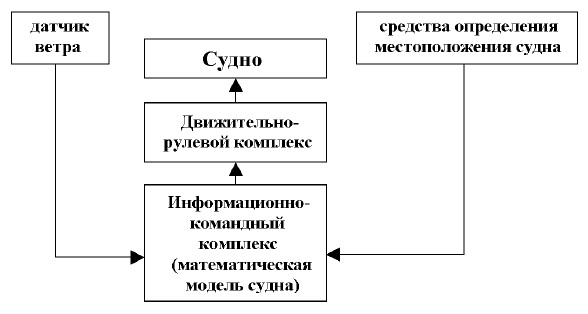
B общем случае на судно действуют ветер, волнение моря и течение, а на оборудование за бортом – подводное течение. Следовательно, выработка управляющих воздействий зависит от величины и углов набегания волн, углов действия ветра и течения, а также от направления подводного течения. Система динамического позиционирования (система ДП) – это многоконтурная система управления активными средствами удержания (стабилизирующими движителями), обеспечивающая заданное положение судна или его перемещение по выбранной траектории при действии внешних сил, в виде волнения моря, ветра и течения. В состав системы динамического позиционирования входят три комплекса устройств: измерительный, информационно-командный и движительно-рулевой (схема 1).
В системе ДП происходят обработка информации о местоположении объекта относительно
заданной точки, вычисление сил и моментов, действующих на объект, и вырабатываются управляющие
сигналы, воздействующие на средства удержания (движительно-рулевые комплексы, подруливающие
устройства). Для функционирования системы динамического позиционирования необходимо обеспечить
определение местоположения объекта управления, а также параметров внешних возмущений. В
измерительном комплексе системы ДП для определения координат судна предусмотрены следующие
высокотехнологичные средства: Taut Wire (способ натяжного вайера), FanBeam (технология лазера),
Artemis (технология радара), DGPS, гидроакустические системы (Operator manual…, 2003).
Рассмотрим возможность измерения параметра внешних возмущений более подробно. Течение
создает постоянные или медленно меняющиеся по величине и направлению возмущающие силы и
вращающий момент гидродинамической природы. Влияние ветра создает низкочастотные возмущающие
силы аэродинамической природы. Влияние волнения создает возмущающее воздействие, которое может
быть представлено в виде суперпозиции низкочастотного и высокочастотного возмущения.
Низкочастотное возмущение – это волновой дрейф, представляющий собой дополнительное течение,
обусловленное волной. Величина сил волнового дрейфа зависит от величины волны, то есть от балльности
морского волнения. Высокочастотное возмущение представляет собой узкополосный случайный
центрированный процесс. Частота максимума спектра определяется периодом морского волнения.
В системах ДП, используемых в настоящее время, только скорость и направление ветра
непосредственно измеряются высокоточными датчиками, остальные параметры внешних воздействий
вычисляются по эмпирическим формулам с использованием математической модели движения судна,
которая представляет собой главную основу информационно-командного комплекса системы.
Традиционно математическую модель получают на основе теоретических исследований и
модельного эксперимента, в котором измеряются гидродинамические реакции на ротативных установках
или механизмах планарного движения. Поэтому естественным путем уточнения математической модели
является натурный эксперимент. Подстройка результатов расчетов по математической модели под
натурный эксперимент связывается с задачей идентификации, которая понимается как способ
восстановления или уточнения математической модели судна по результатам измерений его
кинематических параметров движения, полученным в процессе эксперимента (Гофман, 1988).
Таким образом, результаты натурного эксперимента играют важнейшую роль в достоверном
функционировании всей системы в целом, а результаты натурного эксперимента, проведенного в
условиях арктических морей при непосредственном влиянии суровых гидрометеорологических
факторов, могут обеспечить наивысшую степень эффективности и достоверности, точности и
надежности работы судов в режиме ДП в северных широтах.
Важно отметить, что в комплекс информационно-командных устройств входит фильтр Калмана,
принцип работы которого основан на физическом смысле понятий наблюдаемости и управляемости по
Калману. Наблюдаемость по Калману является характеристикой связности системы. Если система
наблюдаема, например, по фазовой координате x1, то это означает, что изменение x1 влияет на остальные
координаты, и, следовательно, наблюдая достаточно долго за х1, мы можем восстановить остальные
переменные, а с помощью регулятора u = u(x1) мы можем влиять на их поведение. Управляемость по
Калману характеризует предельную эффективность управляющих воздействий в системе. В системе,
управляемой по Калману, управляющее воздействие (если оно достаточно велико и сформировано в
функции достаточно богатого набора фазовых координат и = и(х1; х2; ...; хп) или же в функции времени
u = u(t)), может перевести систему за конечное время в любое состояние, в любую точку фазового
пространства (Петров, 1985).
Стабилизация положения судна относительно заданной точки осуществляется непосредственно
с помощью движительных устройств различного типа, комбинации которых являются движительно-
рулевым комплексом системы. С целью реализации требуемых тяговых усилий различных направлений
применяются движители следующих типов: винты с фиксированными лопастями для создания
продольной тяги; винты с регулируемым шагом, позволяющие регулировать тягу путем изменения шага
винта; крыльчатые движители Фойт-Шнейдера с циклоидальными винтами (регулирование тяги и ее
направления осуществляется путем управления кинематикой лопастей); выдвижные движительно-
рулевые колонки, регулирование тяги которых производится путем изменения частоты вращения, а
управление направлением тяги осуществляется путем поворота агрегата вокруг вертикальной оси.
Движительно-рулевой комплекс системы должен обеспечить не только удержание судна на
точке, но и стабилизацию курсового угла. На судах, где разворот корпуса относительно заданного
положения конструктивно ограничен углами в пределах 30°, задача стабилизации угла курса становится
технически необходимой. На тех судах, где допускается круговое вращение корпуса, эта задача
возникает с целью минимизации расходуемой средствами активного управления энергии. В этом случае
определяется оптимальное значение курсового угла, с точки зрения минимального воздействия на судно
внешних сил, и осуществляется разворот судна по курсу на необходимый угол.
Заключение
Эксплуатация судов с системой динамического позиционирования и проведение натурного
эксперимента показали, что сложность решения задачи удержания судов в открытом море с высокой
точностью зависят от следующих факторов:
– глубины моря, максимальной допустимой балльности моря, скорости ветра и течения в месте
проведения работ;
– прочности буровых труб и связанного с ней максимально допустимого радиуса отклонения центра
тяжести судна от заданной точки на дне моря;
– надежности функционирования системы;
– способа и точности определения регулируемых координат положения судна;
– мощности устанавливаемых на судне движителей;
– динамических характеристик судна;
– принципа построения системы динамического позиционирования;
– достоверности математической модели движения судна.
Благодаря своим высоким техническим характеристикам, удобству эксплуатации, возможности
проведения работ на значительных глубинах суда с системами динамического позиционирования
получили широкое практическое применение. Несмотря на их многообразие, эти суда объединяет общий
принцип функционирования систем ДП. Но выбор и компоновка стабилизирующих движителей, средствопределения
координат местоположения центра ротации судна относительно заданной точки, структуры
построения системы динамического позиционирования остаются индивидуальными для каждого судна в
зависимости от выполняемых задач и технического оснащения.
С возрастанием глубин и расширением географии проведения работ предъявляются все более
жесткие требования к надежности систем динамического позиционирования, разработке и оптимизации
математических моделей движения судов, которые бы обеспечивали требуемые показатели по точности
стабилизации положения судна при минимальных затратах энергии, в неблагоприятных условиях
эксплуатации в районах арктических морей.