Повышение надежности и эффективности систем динамического позиционирования судов
Потёмкин А.Э., Габрук Р.А.
Источник: http://www.nbuv.gov.ua/portal/natural/Asts/2009_15/09paesdp.pdf
Историю систем динамического позиционирования принято вести
с 1957 года. Вызвано это было необходимостью произвести бурение
на глубине 4500 м, что исключало возможность использования якорей. Проблема
позиционирования была решена использованием гидроакустических буев, однако удержание
буровой платформы “на точке” осуществлялось оператором вручную. Дальнейшее развитие
систем осуществлялось быстрыми темпами в угоду все возраставшему спросу. Разрасталась и область
применения систем динамического позиционирования. В настоящее время системы динамического
позиционирования (сокращенно СДП) получили широкое распространение. Эти системы широко
используются в морском бурении, при завозке якорей, дноуглубительных работах, укладке кабелей и
трубопроводов, при обеспечении водолазных работ, швартовке судов и др.
При использовании СДП нередко происходят сбои, которые могут
привести к авариям. Целью настоящей статьи является поиск путей
повышения надежности и эффективности работы СДП.
Классификация оборудования систем динамического позиционирования регламентируется
Циркуляром Комитета по Безопасности Мореплавания Международной Морской Организации №645 от
1994 г (MSC/CIRC 645 June 1994). Система динамического позиционирования состоит из активных
и статических компонентов. К активным компонентам относят генераторы, движители, автоматически
управляемые клапаны и т.д. К статическим компонентам относят кабельные трассы, провода,
трубопроводы и т.д. Взаимодействием этих компонентов достигается возможность удержания судна в позиции.
Системы делятся Международной Морской Организацией на три класса. Для оборудования систем динамического позиционирования 1
класса потеря позиции судном может наступить вследствие неисправности одного из компонентов. Оборудование СДП 2
класса обеспечивает удержание позиции при выходе из строя одного из активных компонентов или системы. При обеспечении
надлежащей защиты, одобренной Администрацией государства, и соблюдении норм технической эксплуатации, считается,
что статические компоненты не могут выйти из строя. Единичным отказом считается отказ одного из активных компонентов,
или одного из статических компонентов, если статический компонент не задокументирован надлежащим образом относительно
защиты и надежности. Для оборудования СДП 3 класса единичным отказом считается все перечисленное для СДП 2 класса, а
также считается возможным выход из строя любого статического компонента. Единичным отказом также считается выход из
строя всех компонентов одного из водонепроницаемых помещений по причине затопления или пожара.
Представим силы, воздействующие на судно, в виде составляющих: базовые силы; силы воздействия окружающей среды; управляющие силы.
К базовым отнесём: силы инерции; гидростатические силы, включающие силы поддержания и остойчивости; гидродинамические силы,
создаваемые корпусом судна.
Силы воздействия окружающей среды делятся на следующие две группы - это аэродинамические и гидродинамические силы. К ним от-
носятся силы: ветра, волнения, течения, гидродинамического взаимодействия с другими объектами.
Ветер создает низкочастотные возмущающие силы аэродинамической природы.
Волнение создает возмущающее воздействие, которое может быть
представлено суперпозицией низкочастотного и высокочастотного
возмущений.
Низкочастотное возмущение - волновой дрейф. Представляет собой, по существу, дополнительное течение, обусловленное волной.
Величина сил волнового дрейфа зависит от высоты волны, т.е. от бальности морского волнения. Направление и величина сил волнового
дрейфа не измеряется. При этом очень грубо можно считать, что направление действия силы близко к направлению ветра. Величина силы
может быть очень приближенно оценена по эмпирическим формулам, в зависимости от скорости ветра.
Высокочастотное возмущение представляет собой узкополосный случайный центрированный процесс. Частота максимума спектра определяется
периодом морского волнения. Высокочастотные возмущающие силы имеют большие значения и не могут быть скомпенсированы управляющими
силами судна (они компенсируются системой после того, как судно вышло из заданного положения).
Течение создает постоянные или медленно меняющиеся по величине и направлению возмущающие силы и вращающий момент гидродинамической природы.
Система динамического позиционирования вырабатывает сигналы в виде требуемых сил по продольной и поперечной осям и момента
вращения относительно вертикальной оси (рис. 1). Комбинацией этих трех усилий достигается компенсация внешних воздействий и удержание
судна в заданном положении или движение судна в заданном направлении. Формирование управляющих сил и момента может быть
осуществлено как вручную при помощи джойстика, так и автоматически. На рис. 1 приведена наиболее распространенная конфигурация
движителей.
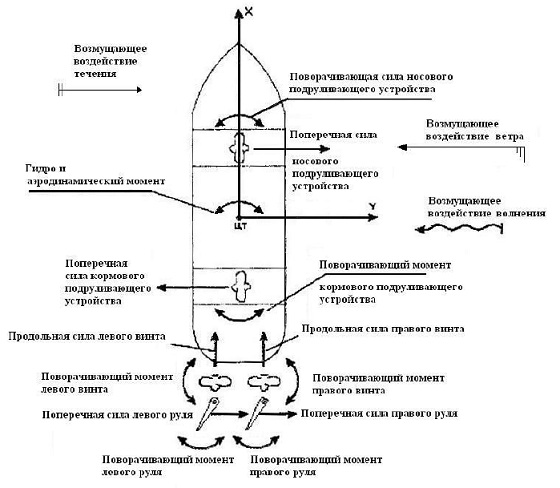
Рассмотрим управляющие силы и моменты, которыми СДП компенсирует действия внешних факторов и выполняет задачи, поставленные
оператором. Для наглядности рассмотрим редко используемую наиболее информативную конфигурацию движителей, а именно:
поворотная колонка, подруливающее устройство тоннельного типа, два винта фиксированного шага в комбинации с совместно управляемыми
полубалансирными рулями (рис. 2).

Система получает информацию о внешних воздействиях с помощью сенсоров, которые зачастую дублируются. О
ветре - с помощью датчиков ветра. О курсе - с помощью гирокомпасов и GPS. Об углах крена и дифферента, характеристику
качки - с помощью электронных систем определения параметров качки. Также используется информация лага, эхолота,
устройств измерения угловой скорости рыскания, электронные датчики измерения осадки. Особое внимание уделяется
системам определения места судна. Под этим в различных задачах подразумевается не только точное определение координат, но и точное
определение положения судна относительно интересующего нас объекта (платформы, дна либо другого судна). Для этого используют
системы спутниковой навигации, включая закрытые коммерческие кодировки. Также используют системы позиционирования относительно
объектов: тугонатянутый трос; системы гидроакустики; радио системы(Artemis); лазерные системы позиционирования (системы Cy
Scan, Fanbeam и др.).
Структурную схему работы СДП можно упрощенно представить рис. 3. Информация о ветре, поступающая с датчиков, обрабатывается
в блоке расчета аэродинамических сил. Затем информация о ветре передается в блок математической модели судна, где строится модель
динамики судна. Для ее построения необходимы так же данные о позиции судна. Эти данные поступают из различных источников, проходят
обработку и поступают в блок построения модели динамики судна. Туда же поступает информация о состоянии движителей, их доступности
(оператор может выбирать конфигурацию движителей), запасе мощности. Эта информация генерируется в блоке модели движителей. Высокочастотная
модель динамики и модель динамики осуществляют прогноз координат, т.е. динамику движения. Этот прогноз осуществляется с помощью
алгоритма оценивания курса и угловой скорости рыскания и алгоритма оценивания координат и скоростей.

Информация, генерируемая блоком математической модели судна, передается в блок формирования программы движения. Там информация обрабатывается регулятором позиции и регулятором скорости. Из блока формирования программы движения сигналы о необходимых управляющих силах и моментах идут в исполнительный блок, где формируется алгоритм распределения упоров. Далее сигнал поступает на движители, которые со свойственной им задержкой (обусловленной максимальной скоростью разворота поворотной колонки или скоростью разворота лопасти ВРШ) создают необходимые упоры. Следует отметить, что система и оператор имеют постоянную информацию в режиме реального времени о состоянии движителей. Контроль с помощью джойстика представляет собой альтернативный вариант управления судна. Управление осуществляется оператором, который задает вектор желаемого смещения. Сигнал поступает сразу в исполнительный блок, который формирует алгоритм распределения упоров. Далее управляющий сигнал идет непосредственно к движителям. Режим джойстика также имеет функцию автоматического удержания курса. Режим джойстика требует довольно высоких практических навыков от оператора. Этот режим можно использовать при швартовке, при подходах, при выполнении буксировочных работ (в частности джойстик облегчает работу судоводителю при перестановке буровых платформ).