Источник: Інформаційні управляючі системи та комп'ютерний моніторинг (ІУС та КМ-2011)./ Матеріали II всеукраїнської
науково-технічної конференції студентів, аспірантів та молодих вчених. — Донецьк, ДонНТУ — 2011, I Том, с. 192-199.
УДК 004.896
НЕЧЕТКОЕ УПРАВЛЕНИЕ ТЕМПЕРАТУРНЫМ РЕЖИМОМ В КОЛОННЕ СИНТЕЗА АММИАКА
Роик В.С., Шатохин П.А.
Донецкий национальный технический университет
Кафедра автоматизированных систем управления
E-mail: vadim_roik@bigmir.net, pshatokh@mail.ru
Аннотация:
Роик В.С., Шатохин П.А., Нечеткое управление температурным режимом в колонне синтеза аммиака. В данной статье рассмотрены основные принципы регулирования температурного режима в колонне синтеза аммиака. Приведены результаты разработки нечеткой модели управления температурным режимом в колонне синтеза аммиака в математическом пакете MATLAB.
Введение
Применение нечеткой логики в технологических процессах – это достаточно новая отрасль знаний, которая в последнее время достаточно активно развивается. Нечеткая логика оперирует нечеткими лингвистическими высказываниями вместо огромного количества математических формул и чисел, что значительно улучшает понимание технологических процессов, а также снижает сложность в управлении большими промышленными объектами. Методы, которые заложены в управление синтезом аммиака, построены на сложных математических вычислениях, поэтому они зачастую сложны для понимания человека. Применение нечеткой логики в управлении температурным режимом в колонне синтеза должно упростить регулирование процессов нагревания и охлаждения, сделать модель управления более простой и понятной, а также снизить расход сырья, требуемый на производство продукции.
В настоящей работе рассматривается решение проблемы поддержания оптимального температурного режима в колонне синтеза аммиака при помощи аппарата нечеткой логики.
Общая постановка задачи
На этапе синтеза аммиак получается вследствие химических реакций синтез-газа в колонне синтеза. На рисунке 1 показана четырехполочная колонна с аксиальными насадками. Основной поток газа поступает в колонну снизу, проходит по кольцевой щели между корпусом колонны 15 и кожухом катализаторной коробки 3 и поступает в межтрубное пространство теплообменника 6. Здесь синтез-газ нагревается конвертированным газом до 420 – 440 °С и проходит последовательно четыре слоя катализатора 8, 10, 12, 14, между которыми подается холодный байпасный газ.
После четвертого слоя катализатора газовая смесь при 500—515 °С поднимается по центральной трубе 2, проходит по трубкам теплообменника 6, охлаждаясь при этом до 320—350 °С, и выходит из колонны [1].
Синтез аммиака ведут при очень высоких давлениях (30-33 МПа), чтобы сместить равновесие в сторону образования аммиака. Температура при этом должна быть не менее 460°С (при более низких температурах процесс перестает быть .устойчивым) и не более 530°С (во избежание перегрева катализатора).
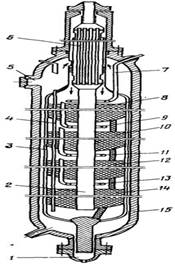
Рис. 1 Четырехполочная колонна синтеза аммиака мощностью 1360 т/сут 1 – люк для выгрузки катализатора; 2 – центральная труба; 3 – корпус катализаторной коробки; 4 – термопарный чехол; 5 – загрузочный люк; 6 – теплообмен ник; 7, 9, 11, 13 – ввод байпасного газа; 8, 10, 12, 14 – катализаторные слои; 15 – корпус колонны.
Для достижения более высокой производительности процесса синтеза необходимо проводить процесс при высоких давлениях и оптимальном для катализатора температурном режиме, при больших объемных скоростях и на возможно более чистом газе.
Для поддержания нормального температурного режима (460°С - 530°С) в колонне синтеза пользуются следующими способами: меняют интенсивность циркуляции газа, либо меняют соотношение газовых потоков, направляемых в колонну.
Изменением интенсивности циркуляции газа целесообразно пользоваться до тех пор, пока не будет установлена наиболее выгодная нагрузка агрегата по газу. В дальнейшем нагрузку изменяют только при резких расстройствах технологического режима.
Постоянным приемом регулирования температуры процесса синтеза является изменение соотношений газовых потоков, направляемых в колонну через главный вентиль и холодный байпас (иногда два байпаса, а в колоннах с полочной насадкой — даже четыре). При повышении температуры, наблюдаемом ранее всего на входе газа, открывают вентиль холодного байпаса до тех пор, пока температура не достигнет заданной нормы. Если же при полном открытии этого вентиля температура продолжает возрастать, для поддержания ее в нужных пределах прикрывают главный вентиль, что приводит к увеличению потока газа, идущего через холодный байпас.
При понижении температуры поступают обратным образом. Сначала полностью открывают главный вентиль, затем постепенно прикрывают вентили холодного байпаса. Если эти меры не дают эффекта, приходится уменьшать количество газа, подаваемого в колонну [2].
Управление процессом регулирования температурой в колонне синтеза аммиака производит непосредственно оператор-технолог, т.е. фактически регулирование производится вручную. Для того, чтобы автоматизировать данный процесс, необходимо использовать такую систему, которая была способна заменить специалиста-эксперта (в нашем случае, оператора-технолога), т.е. могла самостоятельно принимать решения на основании полученных данных.
Целью данной работы является исследование принципов регулирования температуры в колонне синтеза аммиака, выбор методов построения системы регулирования, а также ее частичная реализация.
Исследования
Как было сказано ранее, процесс регулирования во многом завит от действий оператора-технолога, от его профессиональных навыков и опыта. Поэтому для решения задачи реализации автоматического регулирования температурным режимом в колонне синтеза аммиака был выбран аппарат нечеткой логики, ведь он основывается на продукционных правилах, которые, в свою очередь, проектируются на основании экспертных оценок. Продукционные правила нечеткой логики близки по своей структуре со стилем мышления человека, что значительно упрощает управление сложными технологическими объектами.
Процессы нагревания и охлаждения колонны инерционны, поэтому при синтезе алгоритма управления температурным режимом учитывалась не только температура, но и скорость ее изменения, которые являются входными переменными алгоритма управления.
Для создания нечеткой модели управления температурным режимом колонны синтеза аммиака необходимо создать нечеткие правила, на основании которых температура автоматически будет поддерживаться в оптимальном для протекания реакции интервале. Регулирование температуры в колонне будет производиться за счет изменения соотношения газовых потоков, направляемых на каждую из четырех катализаторных полок колонны через холодные байпасы. На рисунке 2 показана модель нечеткого управления температурным режимом в колонне синтеза аммиака.
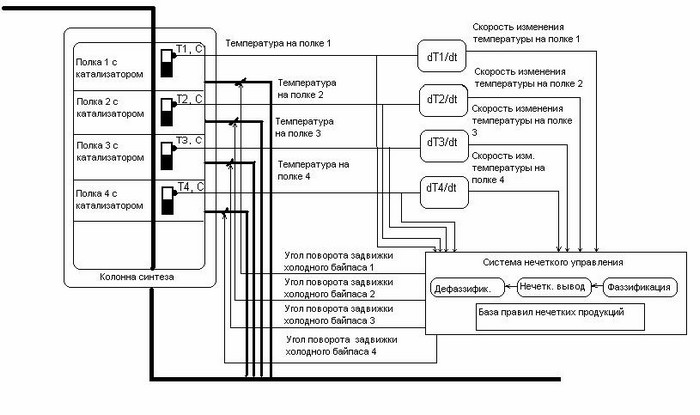
Рис. 2 Иллюстрация нечеткой модели управления температурным режимом в колонне синтеза аммиака
Отметим, что нечеткие правила управления составлены для регулирования температуры на одной полке с катализатором. Правила регулирования температуры для остальных трех полок идентичны разработанным правилам.
Входными параметрами для системы управления будут температура на полке колонны (X1), а также скорость изменения данной температуры (X2). Выходной переменной будет угол поворота задвижки холодного байпаса (Y). При этом, значение температуры измеряется в градусах Цельсия, скорость изменения температуры – в градусах Цельсия за секунду, угол поворота задвижки – в угловых градусах. Следует отметить, что поворот задвижки вправо означает положительное направление отсчета, поворот влево – отрицательное.
Значениям температуры (X1) были поставлены в соответствие следующие лингвистические термы:
NB – очень низкая;
NS – низкая;
Z – близкая к норме;
PS – высокая;
PB – очень высокая.
Значению скорости изменения температуры (X2) были поставлены в соответствие следующие лингвистические термы:
NB – очень низкая;
NS – низкая;
Z – близкая к нулю;
PS – высокая;
PB – очень высокая.
Выходной переменной алгоритма – углу поворота задвижки (Y) соответствуют следующие лингвистические термы:
PB – большой положительный;
PM – средний положительный;
PS – малый положительный;
Z – близкий к нулю;
NS – отрицательный малый;
NM – отрицательный средний;
NB – отрицательный большой.
Были сформированы следующие правила регулирования:
R1: ЕСЛИ X1 = PB И X2 = PB, ТО Y = NB;
R2: ЕСЛИ X1 = PB И X2 = PS, ТО Y = NB;
R3: ЕСЛИ X1 = PB И X2 = Z, ТО Y = NM;
R4: ЕСЛИ X1 = PB И X2 = NS, ТО Y = NM;
R5: ЕСЛИ X1 = PB И X2 = NB, ТО Y = NS;
R6: ЕСЛИ X1 = PS И X2 = PB, ТО Y = NM;
R7: ЕСЛИ X1 = PS И X2 = PS, ТО Y = NS;
R8: ЕСЛИ X1 = PS И X2 = Z, ТО Y = NS;
R9: ЕСЛИ X1 = PS И X2 = NS, ТО Y = Z;
R10: ЕСЛИ X1 = PS И X2 = NB, ТО Y = Z;
R11: ЕСЛИ X1 = Z И X2 = Z, ТО Y = Z;
R12: ЕСЛИ X1 = Z И X2 = PB, ТО Y = NS;
R13: ЕСЛИ X1 = Z И X2 = PS, ТО Y = NS;
R14: ЕСЛИ X1 = Z И X2 = NS, ТО Y = PS;
R15: ЕСЛИ X1 = Z И X2 = NB, ТО Y = PS;
R16: ЕСЛИ X1 = NS И X2 = NB, ТО Y = PM;
R17: ЕСЛИ X1 = NS И X2 = NS, ТО Y = PS;
R18: ЕСЛИ X1 = NS И X2 = Z, ТО Y = PS;
R19: ЕСЛИ X1 = NS И X2 = PS, ТО Y = Z;
R20: ЕСЛИ X1 = NS И X2 = PB, ТО Y = Z;
R21: ЕСЛИ X1 = NB И X2 = NB, ТО Y = PB;
R22: ЕСЛИ X1 = NB И X2 = NS, ТО Y = PB;
R23: ЕСЛИ X1 = NB И X2 = Z, ТО Y = PM;
R24: ЕСЛИ X1 = NB И X2 = PS, ТО Y = PM;
R25: ЕСЛИ X1 = NB И X2 = PB, ТО Y = PS.
При решении задач математического моделирования систем с использованием теории нечетких множеств необходимо выполнение большого объема операций над лингвистическими переменными, поэтому для выполнения нечетких операций использовались функции принадлежности стандартного вида – треугольные.
На основании приведенных правил нечеткого логического вывода была составлена табл. 1.
Значения функций принадлежности выходной принадлежности – угла поворота задвижки холодного байпаса Y определяется оператором Мамдани.
Конкретное значение управляющего воздействия определяется процедурой дефаззификации методом центра тяжести
Таблица 1 Правила логического вывода
|
Скорость изменения температуры X2 |
Значение температуры X1 |
||||
|
NB |
NS |
Z |
PS |
PB |
|
|
NB |
PB |
PM |
PS |
Z |
NS |
|
NS |
PB |
PS |
PS |
Z |
NM |
|
Z |
PM |
PS |
Z |
NS |
NM |
|
PS |
PM |
Z |
NS |
NS |
NB |
|
PB |
PS |
Z |
NS |
NM |
NB |
.
Для моделирования алгоритма использовался пакет Matlab и его приложение Fuzzy Logic Toolbox.
На рисунке 3 показано формирование входных переменных – температуры (X1) и скорости изменения температуры (X2). Как было сказано ранее, из-за большого объема операций над лингвистическими переменными для переменных использовались треугольные функции принадлежности, ввиду их простоты использования в вычислениях. Значение входной переменной температуры (Х1) лежит в интервале от 460°С до 530°С, т.к. в данном интервале лежат оптимальные значения температуры.
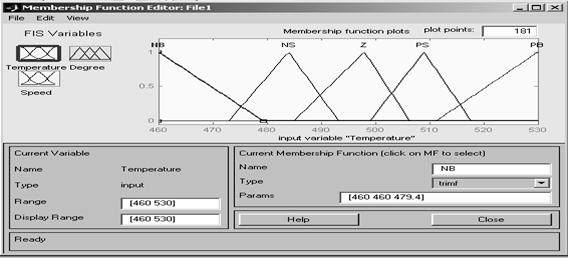
Рис. 3 Лингвистические термы входной переменной – температуры
На рисунке 4 представлена зависимость управляющего воздействия от входных значений температуры и скорости ее изменения:
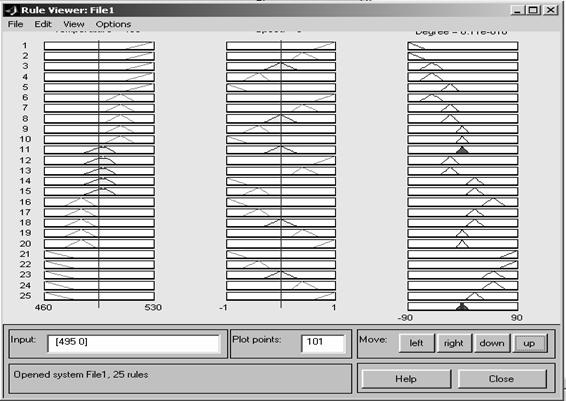
Рис. 4 Зависимость управляющего воздействия от значений входных переменных
Графический вид зависимости выходной переменной (угол поворота задвижки холодного байпаса) от входных значений температуры и скорости изменения температуры представлен на рисунке 5. Закономерно, что угол поворота задвижки растет при увеличении температуры и скорости ее приращения (еще раз напомним, что знак «-» в значении угла поворота задвижки означает то, что задвижка движется влево, т.е. при значении -90° задвижка полностью открыта), и наоборот, при уменьшении температуры угол поворота задвижки холодного байпаса уменьшается, т.е. задвижка постепенно закрывается.
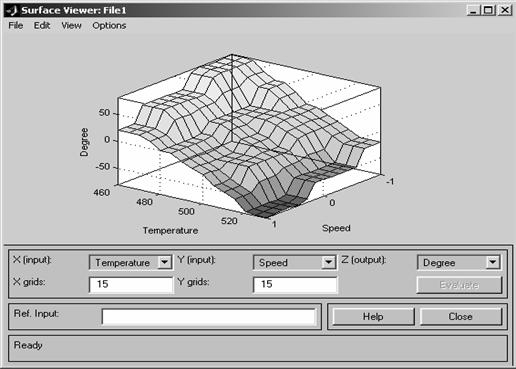
Рис. 5 Пространство возможных решений
Выводы
Регулируемое значение угла поворота задвижки холодного байпаса напрямую зависит от значения температуры на полке с катализатором, а также от скорости ее изменения. Чем больше температура, тем больше угол поворота, и наоборот. Например, при значении температуры 530 °С и скорости ее изменения 1 °С/сек мы видим, что значение угла поворота задвижки составляет -90 °, что означает, что задвижка холодного байпаса полностью открыта. При менее существенных температурных изменениях регулирование происходит более плавно. В целом, процесс поддержания оптимального температурного режима следует вести аккуратно, чтобы избежать очень сильных температурных колебаний.
Перспективным в направлении моделирования систем с нечетким управлением является проведение модельного эксперимента с использованием наложения различных шумов, разнообразных возмущающих воздействий и исследование устойчивости системы, а также исследование систем с векторным управляющим воздействием.
Литература:
1. Кузнецов Л.Д., Дмитренко Л.М., Рабина П.Д., Соколинский Ю.А. Синтез аммиака. М.: Химия, 1982 г.
2. В.В. Кафаров, В.Н. Ветохин Основы автоматизации проектирования химических производств. М.: Наука, 1987 г.
3. Прикладные нечеткие системы /Под ред. Тэтано Т., Асаи К., Сугэно М: Мир, 1993.
4. A.В. Леоненков Нечеткое моделирование в среде MATLAB, СПб, 2005 г.