УДК.621.311
МЕТОДЫ НАСТРОЙКИ НЕЧЕТКОГО АДАПТИВНОГО ПИД-РЕГУЛЯТОРА
Михайленко В.С., Ложечников В.Ф.
При управлении сложными объектами, функционирующими в условиях нестационарности, широкое применение нашли адаптивные регуляторы, реализующие типовые ПИ- или ПИД-законы регулирования. Адаптивные контроллеры зарубежных и отечественных производителей: Ремиконт, Овен, Сименс, Микрол и т.д., как правило, реализуют метод Зиглера-Николса [1]. Следует отметить, что данный метод предполагает вывод объекта в область автоколебаний, за счет перехода на П-закон и грубого варьирования коэффициента усиления Кр. Однако, значительный ряд технологических процессов по условиям эксплуатации не допускают автоколебательного режима. Таким образом, задача нахождения оптимального метода адаптации остается открытой.
Вместе с тем, в последнее время широкую популярность находят нечеткие модели и алгоритмы управления [2,3,5]. Известно, что нечеткое управление основано на использовании не столько аналитических или теоретических моделей, сколько на практическом применении знаний квалифицированных специалистов, представленных в форме лингвистических баз правил. Нечеткое управление эффективно в случаях недетерминированности параметров объектов, когда существует определенный опыт экспертов по управлению и настройке автоматизированной системы регулирования (АСР). Теория нечеткой логики позволяет использовать знания специалистов – наладчиков с целью улучшения процессов управления и оказания помощи (супервизорный режим) по настройке типовых регуляторов. Исходя из вышесказанного, задача создания метода адаптации ПИД-регулятора, реализующего опыт наладчиков, становится актуальной.
Целью статьи является разработка нечеткой экспертной системы, определяющей оптимальные настройки ПИД-регулятора, для его адаптации к объекту управления, и ее апробация в пакете Matlab (Simulink). Разобьем научную задачу на ряд этапов. На первом этапе определим структуру адаптивной АСР (рис.1):
Рис. 1 Структура адаптивного нечеткого управления
где Е – ошибка; Z – задание; Y – выходное значение; N – возмущение; Кр, Ти, Кd – настройки ПИД-регулятора.
На втором этапе в программе Matlab (FLT) производится создание системы нечеткого вывода или адаптера (рис.2)
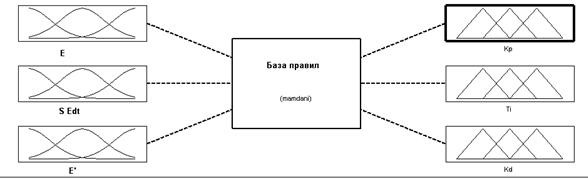
Рис. 2 Графический интерфейс редактора FIS
На третьем этапе проводится фаззификация входных и выходных лингвистических переменных (ЛП). Фаззификация входных значений (ошибки регулирования (Е), ее интеграла и производной) производится согласно рекомендациям [4]. Графики функций принадлежности входных ЛП представлены на рис. 3 - 5.
Функцию принадлежности Z–вида, представляющую терм – «отрицательная ошибка “otr”» можно представить в виде: fz (x, -0.6, -0.1) = [ 1, x < - 0.6; -0.1 – x / 0.5; 0, -0.1 < x].
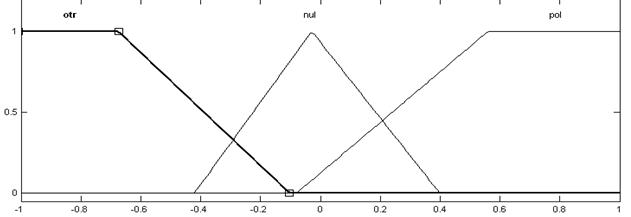
Рис. 3 Функции принадлежности ЛП «ошибка»:
оtr - отрицательная, nul – нулевая, pol – положительная
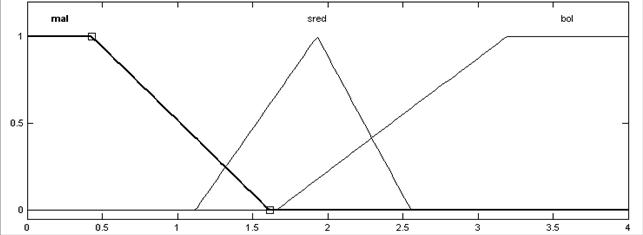
Рис. 4 Функции принадлежности ЛП «интеграл ошибки»:
mal – маленький, sred – среднний, bol – большой
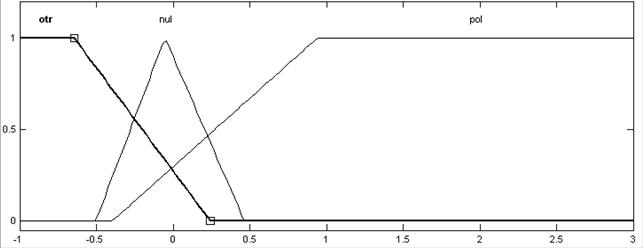
Рис. 5 Функции принадлежности ЛП «производная ошибки»
Этап фаззификации выходных ЛП «настройки ПИД-регулятора» проведен с учетом рекомендаций [4,5] и представлен на рис. 6.
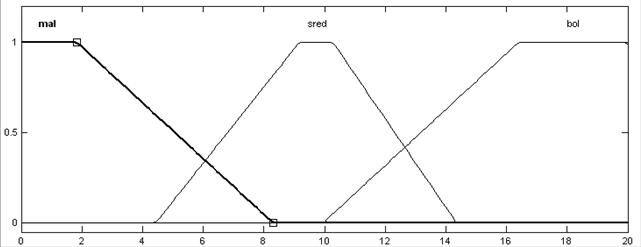
Рис. 6 Функции принадлежности ЛП «коэффициент усиления Кр»:
mal – маленький, sred – среднний, bol – большой
Функции принадлежности ЛП «Ти» и «Кd» также отображаются Z и S – образными графическими видами. Следует отметить, что Ти лежит на универсуме [0-5], а Кd = [0-15].
Четвертый этап заключается в создании базы правил вида «ЕСЛИ …ТО». Исходя из рекомендаций из специализированной литературы [5], проведенных экспериментов в редакторе FLT, а также опыта экспертов-наладчиков систем автоматизации, предлагаются следующие правила: ЕСЛИ «ошибка есть отрицательная» И «интеграл ошибки есть маленький» И «производная ошибки есть отрицательная» ТО «Кр есть большой», «Ти есть большой», «Кd есть большой» и т.д. (рис. 7)
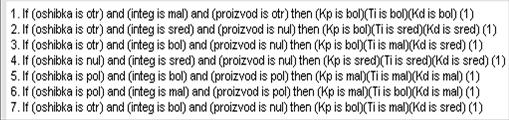
Рис. 7 Фрагмент базы правил
На следующем этапе проводится компьютерное апробирование нечеткой модели. В первоначальном эксперименте использовалась АСР с ПИД-регулятором, функционирующем по каналу задания Z=1, при влиянии на объект канала возмущения при этом: Wоб(S) = 2.5/(5S2+3S+1); WN(S) = 0.5/(5S+1). Настройка регулятора проводилась методом Зиглера-Николса. Значения настроек равны Кр=1.3; Ти=0.15; Кd=10.3, а переходный процесс удовлетворяет основным показателям качества. Предположим, что в связи с неопределенностью условий эксплуатации объекта, произошло изменение значений ключевых параметров такового. Например, Wоб(S) = 2.5/(15S 2 +2S+1); WN(S) = =3.5/(15S+1). При известных настройках регулятора, переходный процесс с новыми значениями передаточных функций обладает перерегулированием G=80%, что недопустимо (рис.8).
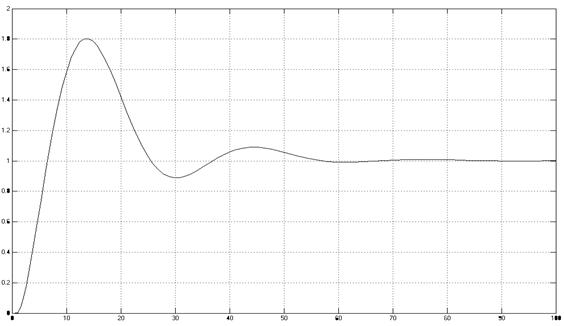
Рис. 8 Переходный процесс по каналу задания
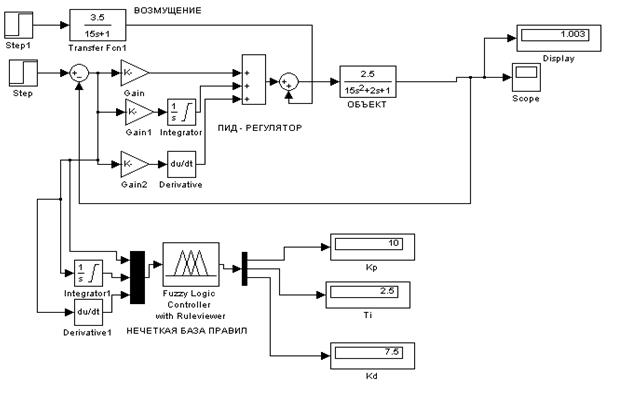
Рис. 9 Экспериментальная схема, выполненная в программе (Simulink)
Таким образом, необходима временная остановка сложного технологического процесса и перенастройка значений настроек ПИД-регулятора.
Произведем проверку нечеткого адаптера при известных условиях (рис.9). Нечеткая система выдала следующие результаты: Кр=10; Ти=2.5; Кd=7.5, а переходный процесс регулирования при данных настройках для ПИД-регулятора показан на рис.10.
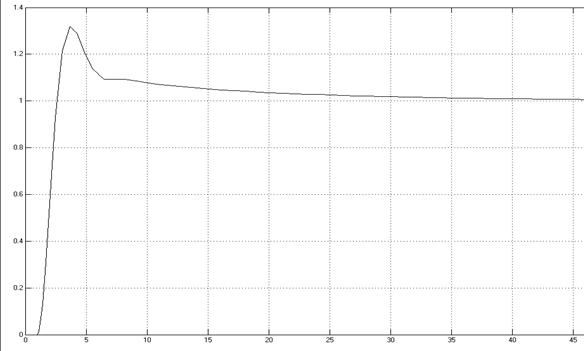
Рис. 10 Переходный процесс, полученный при адаптивных настройках
Как видно из рис.10, перерегулирование G не превышает 30%, что допустимо, а время регулирования Tр уменьшилось по сравнению с предыдущем на 30 секунд. Результат работы нечеткого адаптера в программе Matlab (FTL) показан на рис.11.
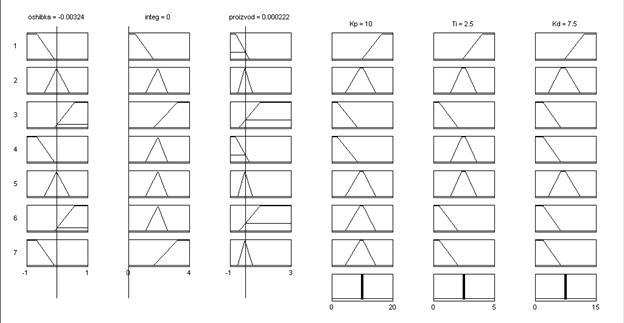
Рис.11 Результат работы нечеткого адаптера
Таким образом, использование нечетких адаптивных ПИД-регуляторов позволит эффективно управлять технологическими процессами без их остановов, а дальнейшее введение нейрокомпьютера может привести к самообучающейся адаптации по определению оптимальных настроек без корректировки базы правил.
ЛИТЕРАТУРА
1. Дьяконов В.П. Simulink 5/6/7 Самоучитель. – М.:ДМК, 2008 – 781с.
2. Леоненков А. Ю. Нечеткое моделирование в среде Matlab и fuzzyTech. - С. - Птб.: БХВ, 2003. - 720 с.
3. Мелихов А.Н. и др. Ситуационные советующие системы с нечеткой логикой. – М.: Наука, 1990. – 272 с.
4. Ротач В.Я., Клюев А.С. Автоматизация настройки систем управления. М.: Энергоиздат, 1984 – 272 с.
5. Алиев Р.А., Церковный А.Э., Мамедова Г.А. Управление производством при нечеткой исходной информации. М.: Энергоиздат. 1991. – 234 с.