1. Вступление
В области вспомогательной робототехники для людей с ограниченными возможностями мы можем найти многие виды систем. Наше внимание останавливается на руке манипуляторе, который позволяет совершать манипуляции любыми видами объектов пользователем. Мы находим статические системы, которые могут только
действовать в ограниченном пространстве, таком как MASTER проект [1]. Другим способом, возможно закрепить манипулятор на кресле-каталке как в FRIEND системе [2].
В этом случае, пространство для действий увеличено, но пользователь должен двигать рукой. В этой статье, наше внимание обращено на автономную мобильную руку манипулятора, такую как MOVAID [3]. Пользователь может отдаленно управлять системой, даже если он не находится в своем инвалидном кресле. Эта мобильная система
принимает во внимание человеческие факторы, представляя различные способности к автономии (траектория планирования, предотвращение препятствия) и полезные режимы управления.
Во-первых, мы представляем систему ARPH и связанные режимы управления. Во-вторых,
мы описываем протоколы, используемые для оценки системы, и затем мы представляем результаты и анализ на основе этих оценок. Завершим мы на эффективности
системы ARPH.
2. Описание системы
2.1 Архитектура
ARPH (Изображение 1.a) является мобильным роботом для помощи людям с ограниченными возможностями. Это составленный из мобильной платформы с двумя ведущими колесами и оборудованный рукой манипулятора под названием МАНУС (6 степеней свободы). Сверхзвуковой сенсорный пояс делает возможным локализовать робота в окружающей среде и избежать препятствий. Система отдаленно управляема через архитектуру клиента/сервера и беспроводную сеть WI-FI. Поэтому он оборудован камерой наклона.

Изображение 1.a – Система ARPH
2.2 Командные модули
Изображение 1.b –Human-Machine Interface
Пользовательский интерфейс, показанный на рисунке 1.b, установлен на отдаленном компьютере. Пользователи могут контролировать робота используя различные режимы управления:
Ручной контроль: пользователь просто управляет платформой
Контроль камеры: Некоторые исследования ([4], [5]) показали, что ориентация
головы человека зависит от желаемой траектории. Например, чтобы повернуть
налево, водитель поворачивает голову влево. Эта идея была перемещена
и осуществлена в ARPH. В режиме управления камеры, пользователь контролирует ориентирование камерой, чтобы получить желаемую скорость вращения платформы. Это
зависит от угла азимута в данный момент. Средства управления "вперед" и
"назад" идентичны ручному режиму. В ручном режиме, кнопка простой остановки
одновременно отменяет линейную и угловую скорость платформы. В
режим управления камеры, эта кнопка отменяет только линейную скорость.
Дополнительная кнопка “центрировать камеру” делает возможным центрировать камеру, камера (вернуть к начальной ориентации, смотреть вперед), и таким образом отменяет угловую скорость. Этот способ контроля более интуитивен и делает возможным сгладить траекторию.
Также к этим способам возможно добавить способность предотвращения препятствия (мобильной основы). Поэтому, используя ультразвук пояса, мобильная платформа может избегать препятствий, держа за главную цель направление, заложенное пользователем. Это особенно полезно при перемещениях в коридорах. В этой конфигурации, пользователь просит простую прогулку и мобильная платформа двигается, оставаясь
автоматически в середине коридора.
Оценивание
Оценка была выполнена в двух частях: первая фаза в ситуации приближенная к ежедневной ситуации, называемой экспериментальные условия, и вторую фазу в полностью экологической ситуации назвали оценкой в экологических условиях ([6] [7]).
3.1 Эксперементальная оценка
3.1.1 Протокол
Протокол, к которому стремятся, оценивает систему ARPH в максимально близком направлении к повседневным условиям жизни. Это поняло три части, все они соответствовали чтобы пойти и принести назад
стакан, бутылку или пакет печенья при различных условиях старта и окончании ситуаций. 7 парализованных пользователей участвовали на случайном пути к оценке. Только шесть из них привели к результатам, которые мы могли использовать.
Перед тестами предметы должны ответить на полу-направленный анкетный опрос. Тогда, они имели фазу обучения, в которой они могли управлять системой после полного
объяснения её функциональности и представление HMI.
Это заняло приблизительно от 30 до 45 минут, в зависимости от людей. После
испытательный срока, испытуемым был предложен новый опрос.
Результаты
Во время обучения наблюдались три вида действий:
действия относились к другим людям
действия относились к самому пользователю
действия относились к объектам.
Технические пособия большинство важных критериев:
5 из 6 пользователей выбрали наиболее важный критерий как важная непринужденность использования и выгода независимости.
4 из 6 пользовательских оценок, выбрали экономию времени как важный критерий.
Только два из 6 считают важным критерием безопасность, комфорт и эстетство.
Анализ
Полезность: Перед манипуляцией 5 человек из 6 думали, что система должна быть
полезной для повседневных действий. После манипуляции 6 из них нашли его полезным. По поводу полноценности приспособления руки манипуляции к инвалидному креслу, 4 пользователя из 6 думают, что более интересно закрепить его на инвалидном кресле. Все они отметили полезность мобильной основы, когда они находятся в своей постели для того, чтобы поднять объекты, о которых забывают. Изобразжние 2 пункта показывает важность независимости их в доме или в закрытом помещении (супермаркет), оба случая описывающие ежедневные ситуации, не могут никуда деться.
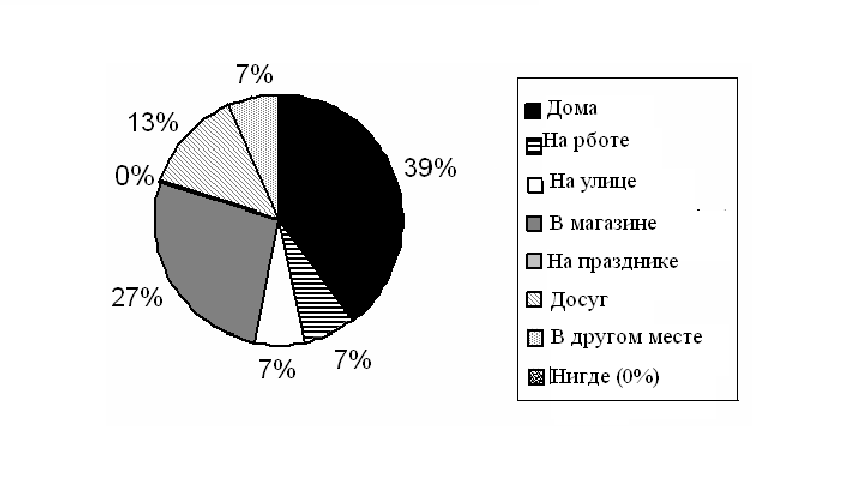
Изображение 2 –Распределение мест, где люди использовали бы систему
Простота использования: Все пользователи выполнили все задачи, отличается только число попыток. Например, чтобы пойти и возвратить стакан 5 из 6 пользователей преуспели еще в первой попытке.
Уровень удовлетворения: Несколько подробных данных были собраны относительно робота, интерфейса, руки и главное простоты использования, так же как ведущая сложность и усталость оценка согласно различным задачам. В целом, 4 пользователя из 6 были удовлетворены, один очень удовлетворенный, еще один менее удовлетворенный.
Оценка в экологических условиях
Такой же вид оценивание провели у пользователя дома, один внутри, второй снаружи.
Время для реализации действий было улучшено. Действия между первой и второй попыткой увеличились с 30% до 60% в зависимости от активности действий
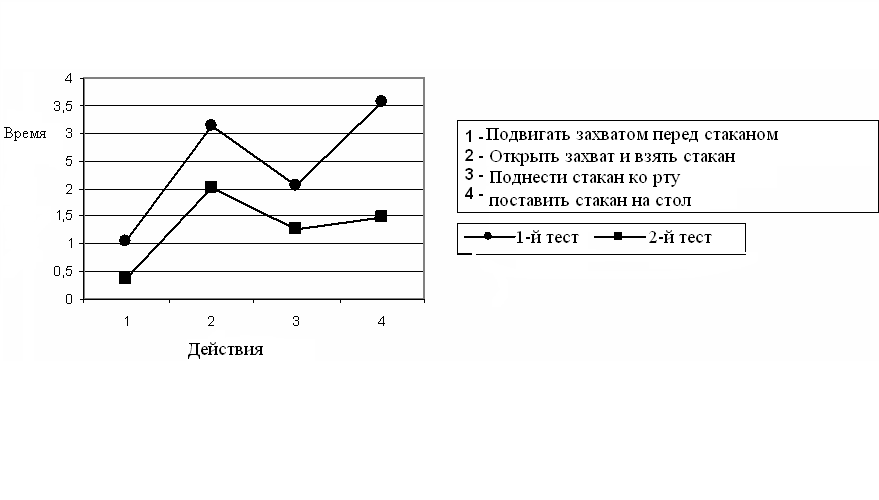
Изображение 3 – Время для выполнения действия
Интересно отметить, что много дополнительных комментариев было собрано
несмотря на тот факт, что до сих пор, оценить мы могли только одного пользователя в
этих экологические условия., Возможно, что этот определенный человек имел более точный анализ, но, очевидно, чтобы мы сделали способным пользователя сдать тест в
окружающей среде, в которой он находится, чтобы жить, позволяет получать другие подходящие комментарии.
Например, он возразил, что слишком много последовательных операций были необходимы для выполнения действия, чтобы поднести чашку к его губам, таким образом, это требовало слишком большой концентрации и, следовательно, было поводом, чтобы произвести много ошибок манипуляции
Это ясно указывает, что HMI должен быть пересмотрен, чтобы создать более автоматизированную фазу, заботясь, в то же самое время, чтобы не оставить пользователя без контроля когда это необходимо
Мы также заметили, что пользователь часто испытывал стресс, боялся не за себя, а за объекты, которыми управлял. В этом случае это была чашка с
сентиментальным отношением, которое мы не наблюдали на таком уровне от не экологической оценки. Деятельность вне дома выдвинула на первый план потребность, чтобы найти способ подать знаки пользователю через видео систему так же как
абсолютная потребность в истинной оперативной системе визуализации.
Заключение и перспективы
Эти оценки показывают интерес людей к мобильному манипулятору руки для инвалидов. Система была хорошо принята, и люди дебатирует больше об эффективности, чем
о виде или безопасности. Для них важно возвратить силу мира и восстановить способности к манипуляции и физически взаимодействовать с другими людьми. Людям бы нравилось использовать эту систему во многих ситуациях (дом, супермаркет). Они думают, что система очень удобна, даже если некоторые задачи как конфискация нуждаются в большем познавательном усилии. Эти оценки показывают нам (исследователям, проектировщикам), что может быть изменено в системе. Пользователи
просят полу автоматические способы для помощи им в соединении умственной схемы
с ручными мерами, предложенными фактической системой. Они хотели бы глобальное
управление способом, разрешающим нам перемещение, не ведя основу (это должно переместиться автоматически). Даже если пользователи не говорили о безопасности, мы должны приложить усилие, чтобы избежать столкновение между рукой и окружающей средой, предлагая благополучные процедуры, в то время перемещения основы.
Список литературы
- M. Hillman, K. Hagan, J. R. Jepson, A wheelchair Mounted Assistive Robot. Proc. ICORR’99 6th
International Conference on Rehabilitation Robotics, pp. 86-91, Stanford California, USA, July 1999.
- C. Martens, N. Ruchel, O. Lang, O. Ivlev, A. Graser. A FRIEND for assisting handicapped people.
Robotics & Automation Magazine, IEEE , Vol. 8, Issue 1, pp. 57-65, Mars 2001
- C. Laschi, G. Teti, G. Tamburrini, E. Datteri, P. Dario. Adaptable Semi-Autonomy in Personal Robots.
Proc. 10th international workshop on Robot and Human Interactive Communication, 2001, Bordeaux,
Paris, France pp. 152-157, 2001.
- Land, M.F. (1998). The visual control of steering. In L.R. Harris & K. Jenkin (Eds). Vision and Action,
163-180. Cambridge University Press.
- Grasso, R., Glasauer, S., Takei, Y., & Berthoz, A. (1996). The predictive brain : Anticipatory control of
head direction for the steering of locomotion. NeuroReport, 7, 1170-1174.
- Nielsen J. (1993). In London Academic Press. Usability Engineering
- Shackel B. (1986). Usability – Context, framework, definition, design and evaluation. In Human
Factors for Informatics Usabilirty, Shackel B. & Richardson S. (Ed), Cambridge University Press,
pp.21-37.
5