СИСТЕМА УПРАВЛЕНИЯ МНОГОУРОВНЕВЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ НА МИКРОКОНТРОЛЛЕРЕ
Е. Ульянов, студент; А.А. Шавелкин, доц., к.т.н.
В настоящее время практически все системы управления преобразователями частоты выполняются на основе различных типов микропроцессоров, как правило, это специализированные DSP микроконтроллеры.
В данной работе рассмотрен вариант реализации системы управления для одной фазы многоуровневого преобразователя частоты (МПЧ) на микроконтроллере типа PIC 16F877, остальные фазы выполняются идентично.
Схема фазы МПЧ включает в себя три изолированных источника постоянного напряжения и восемь ключей на полевых транзисторах, при этом каждому значению выходного напряжения соответствует определенная комбинация включенных транзисторов.
Для построения системы управления МПЧ используется принцип квантования по уровню, при этом заданное синусоидальное напряжение регулируемой амплитуды и частоты сравнивается по уровню с пороговым Ui (U1 = Um/6, U2 = 3Um/6, U3 = 5Um/6). Если Uзад >Ui - осуществляется переход на следующий уровень напряжения - включается соответствующая комбинация ключей. Для исключения возможности возникновения к.з. при переключении ключей соединяющих соседние источники переход осуществляется в два этапа - используется промежуточная комбинация на интервале времени 1мкс, полученная из предыдущей комбинации путем подачи сигнала 0 в разрядах, управляющих выходящими из работы ключами. Только после этого подается комбинация включения следующей ступени напряжения.
Микроконтроллер типа PIC16F877 имеет восьмиразрядную шину данных, десятиразрядный встроенный аналогово-цифровой преобразователь (АЦП) и несколько 8-ми разрядных портов ввода - вывода. Порт А используется как аналоговый для ввода сигналов задания амплитуды и частоты выходного напряжения. При этом для того, чтобы ограничить преобразование восьмью разрядами, на входах АЦП предусмотрены делители напряжения 1:4. Для формирования сигналов управления ключами МПЧ используются остальные порты. Тактовая частота генератора 20МГц.
Упрощенная структура алгоритма управления МПЧ приведена на рис.1
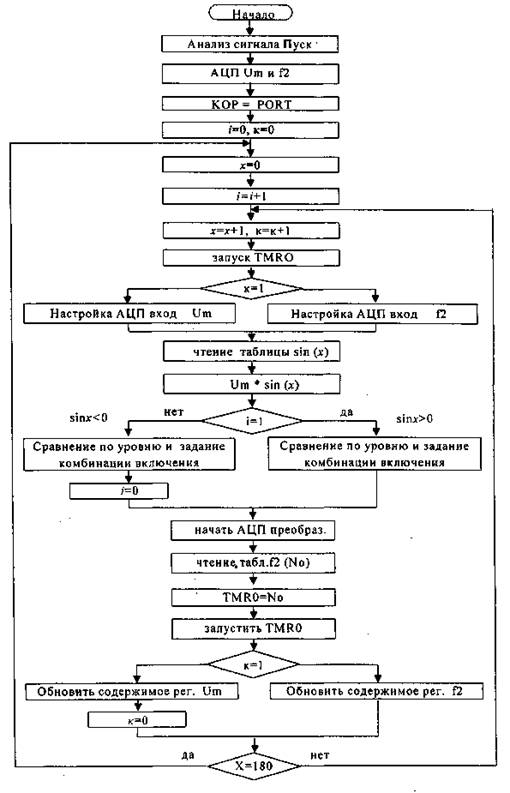
При запуске системы поочередно осуществляется АЦП преобразование сигналов задания амплитуды Um и частоты f2 выходного напряжения с сохранением результата в соответствующих регистрах.
Синусоидальное задающее напряжение формируется с дискретностью х = 1 град. с использованием табличной формы задания функции sinx (каждому значению х от 0 до 180 град. задается двоичный код 0 - 255). Все табличные функции размещаются в памяти программ микроконтроллера. Амплитуда задающего напряжения Um и значение функции sinx перемножаются - старшие, и младшие 8 разрядов результата сохраняются в соответствующих регистрах.
Алгоритм работы для положительного и отрицательного полупериодов выходного напряжения различается комбинациями используемых ключей. Для разделения полупериодов синусоиды введена вспомогательная переменная i, при этом положительной полуволне соответствует i = 1, а отрицательной i = 0.
Для измерения задающих напряжений амплитуды Um и частоты f2 поочередно (через 1 град.) используется один АЦП при соответствующем изменении входов. Для этого введена вспомогательная переменная i, принимающая два значения 1 или 0.