Обеспечение достоверности оценки технического состояния при диагностировании асинхронных электродвигателей
Автор: Гребченко Н.В., Полковниченко Д.В.
Источник: Вісник Приазовського державного технічного університету, випуск 18. – Маріуполь: ПГТУ. – 2008.
Аннотация
Гребченко Н.В., Полковниченко Д.В. Обеспечение достоверности оценки технического состояния при диагностировании асинхронных электродвигателей. The current of an inverse sequence has good responsivity at diagnosing the large number of imperfections of asynchro-nous electric motors in operating duties. The measures for a heightening of an exactitude of measurement and handling of parameters of an operating duty of electric motors allowing are developed to ensure(supply) reliability of statement of the diagnosis with the automized system of technical diagnostics. The accepted measures have passed inspection on mathematical model, in laboratory and industrial conditions.
Непрерывность технологических процессов электрических станций и промышленных предприятий требует надежной работы всех механизмов, участвующих в этих процессах. Для привода большинства рабочих механизмов, благодаря известным преимуществам, используют трехфазные асинхронные электродвигатели (АД) с короткозамкнутым ротором (КЗР).
Необходимость применения автоматизированной системы технической диагностики (АСТД) электродвигателей в последнее время возросла в связи с тем, что большая часть их исчерпала свой ресурс. При этом наибольшую эффективность обеспечивает диагностирование в рабочих режимах электродвигателей, за счет выявления дефектов на ранней стадии их развития.
В настоящее время имеется достаточно много разработок систем диагностирования электродвигателей, позволяющих выявлять практически все возможные виды повреждений. Однако можно выделить основные недостатки большинства из них:
- необходимость отключения электродвигателя или использование для диагностирования режимов пуска, пуска АД с заторможенным ротором и т.д.;
- необходимость использования дополнительных датчиков (вибрации, температуры и т.д.);
- возможность выявления лишь определенного вида дефектов.
Методика диагностики состояния роторных обмоток АД с КЗР [1] основанная на анализе пускового тока в одной из фаз двигателя вторичной цепи тока статора, применима только в режиме пуска электродвигателя. В работе [2] в качестве диагностических параметров предлагается использовать вибрационное ускорение, а также другие параметры вибрационно-механического процесса и уровень шума, при помощи которых можно оценивать неисправности технического состояния машины в процессе работы. Однако для контроля этих параметров необходимо использование дополнительных датчиков вибрации. Недостаток АСТД [3], основанной на контроле пульсаций обобщенного тока статора, заключается в том, что она направлена на выявление только дефектов стержней КЗР и, таким образом, имеет ограниченную область применения.
Проведенный в[4-8] анализ различных видов повреждений показал, что практически любое повреждение электродвигателя приводит к появлению соответствующей электрической или магнитной несимметрии. Проведенные экспериментальные исследования [9] и математическое моделирование установившихся режимов работы АД с КЗР позволили установить, что величина и частота тока обратной последовательности обладают хорошей информативностью при диагностировании часто возникающих дефектов АД (витковые замыкания, обрыв параллельных ветвей обмотки статора и стержней КЗР, дефекты механической части, нарушение паяных и сварных соединений).
Помимо наличия дефектов несимметрия электродвигателя может быть обусловлена следующими причинами:
- несимметрией питающего напряжения;
- естественной несимметрией электродвигателя (несимметрия при отсутствии явных дефектов машины) и сети;
- погрешностью измерения и обработки параметров рабочего режима электродвигателя;
- влиянием помех на канал измерения АСТД.
Неучет этих причин при диагностировании электродвигателей приводит к возможности неправильной постановки диагноза. Возможны два случая неправильной постановки диагноза о состоянии электродвигателя. Первый случай имеет место, когда обследуемый двигатель бракуется, но в действительности он годен. Это приводит к ненужным затратам на вывод в ремонт исправного двигателя. Второй случай имеет место, когда принимается решение об исправности двигателя, тогда как имеет место повреждение. Это приводит к дальнейшему развитию повреждения, возможному выходу двигателя из строя и к увеличению затрат на последующий ремонт.
Для обеспечения достоверности постановки диагноза АСТД электродвигателей требуется использование соответствующих аппаратных и программных мер, позволяющих отстроится или уменьшить влияние вышеприведенных причин появления несимметрии.
Разработанная методика диагностирования АД с КЗР основана на непосредственном измерении фазных токов. При этом изменение величины тока или его составляющих, соответствующее возникновению повреждения на ранней стадии, как правило, не велико и соизмеримо с величиной погрешности канала измерения. Поэтому для практической реализации методики диагностирования необходимо добиться такой степени точности измерения токов, при которой изменение диагностической величины будет больше, чем погрешность канала измерения тока. Основную погрешность в этом канале имеют трансформаторы тока (ТТ). Для повышения точности измерения тока электромагнитными ТТ разработан алгоритм восстановления первичного тока ТТ по известному вторичному [10]. Алгоритм основан на вычислении тока намагничивания с учетом конструктивных особенностей конкретного ТТ. Экспериментальные исследования, проведенные для ТТ типа УТТ-5, показали, что применение разработанного алгоритма позволяет уменьшить погрешность ТТ в нормальном режиме работы (0,37I1ном.тт) на 92,3 %, а в режиме насыщения ТТ (4,6I1ном.тт) на 92,8 %.
В ходе проведения диагностирования на работающих электродвигателях выполняется осциллографирование фазных токов АД и напряжений секции при помощи цифрового устройства регистрации параметров режима (УРПР), выполненного на базе ПЭВМ. Разрядность применяемых в УРПР аналого-цифровых преобразователей (АЦП) не всегда обеспечивает необходимую точность преобразования мгновенных значений токов и напряжений из-за большого диапазона сигналов. Для решения этой проблемы выполняется расширение диапазона измерений путем нормализации сигнала перед его обработкой в АЦП. Разработана математическая модель 10-разрядного АЦП с блоком предварительной нормализации сигнала. Эта модель позволила выбрать оптимальное количество уровней нормализации сигнала – три (фиксируется увеличение модуля входного сигнала более чем в 2, 4, и 8 раз относительно установленного значения). Выбор производился по возможности обеспечения минимальной погрешности при меньшем количестве уровней блока нормализации. На рис.1 приведены осциллограммы изменения тока обратной последовательности, обусловленного погрешностью вносимой 10-разрядными АЦП, без применения нормализации сигналов и при применении трехуровневой нормализации сигналов при амплитуде контролируемых сигналов 1000 делений АЦП. В этом случае использование трехуровневой нормализации снижает погрешность расчета тока обратной последовательности на 46,81%.
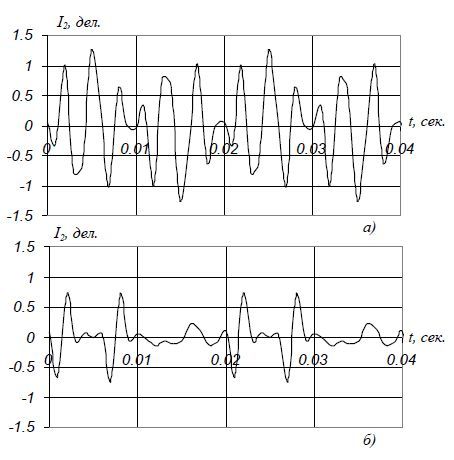
Рисунок 1 – Осциллограммы изменения тока обратной последовательности, обусловленного погрешностью вносимой АЦП: а – без применения нормализации сигналов; б – при применении трехуровневой нормализации сигналов
На рис.2 приведены зависимости величины погрешности расчета коэффициента обратной последовательности по току К2I (относительного содержание тока обратной последовательности в токе статора) от величины используемого динамического диапазона 10–разрядного АЦП. Как видно, без применения блока нормализации сигналов погрешность расчета сильно зависит от величины используемого динамического диапазона АЦП (график 1). В случае же применения блока нормализации сигналов величина используемого динамического диапазона АЦП мало влияет на погрешность расчета тока обратной последовательности (график 2).
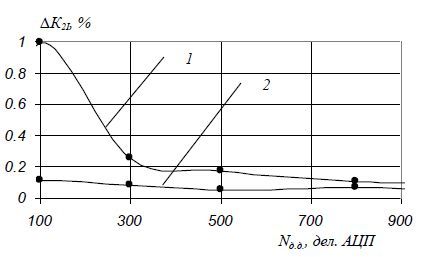
Рисунок 2– Зависимости погрешности расчета К2I от величины используемого динамического диапазона 10 – разрядного АЦП Nд.д.: 1 – без применения нормализации сигналов; 2 – с применением блока трехуровневой нормализации сигнала
Точность обработки контролируемых параметров режима работы АД и расчета тока обратной последовательности зависит от выбора алгоритма расчета векторов токов и напряжений по их мгновенным значениям. Проведенный анализ известных алгоритмов показал, что наименьшую погрешность расчета векторов токов и напряжений по их мгновенным значениям обеспечивает алгоритм двух выборок [11]. На основании этого алгоритма составлена программа расчета симметричных составляющих токов и напряжений.
Из-за дефицита генерирующих мощностей частота в энергосистеме Украины в настоящий период часто снижается значительно ниже номинального значения. На рис.3 приведена зависимость погрешности определения коэффициента обратной последовательности по току K2I от величины отклонения частоты от номинального значения 50 Гц. Результаты расчета этой зависимости показывают, что неучет реально возможного отклонения частоты дает погрешность в определении тока обратной последовательности свыше 0,5 % от номинального тока. Для устранения этой погрешности в программе расчета симметричных составляющих токов и напряжений автоматически производится расчет основной частоты тока f1 для использования при дальнейших расчетах. Для обеспечения требуемой точности измерения f1 разработан следующий алгоритм. Путем подсчета числа периодов дискретизации в течение заданного количества периодов сигнала (например, 50) определяется длительность времени, которая затем уточняется с учетом поправки перехода сигнала через нуль.
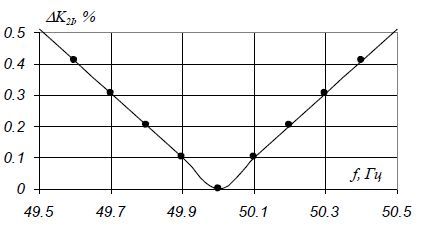
Рисунок 3– Погрешность определения коэффициента ОП по току K2I при отклонении частоты от номинального значения
Начало развития повреждения сопровождается незначительным изменением диагностических параметров. Поэтому для повышения чувствительности системы диагностики и обеспечения достоверности диагноза требуется отстройка от помех, вызванных электромагнитными наводками в условиях системы собственных нужд, шумами АЦП и т.д. Величина составляющих помехи во входном сигнале иногда может превышать величину полезного сигнала. При обработке измерянных выборками и квантованных сигналов чаще всего применяются цифровые фильтры. С их помощью в сигнале выделяются или заглушаются определенные частоты для улучшения отношения сигнал/шум. Для улучшения отношения полезный сигнал/помеха при обработке измеряемых выборками сигналов применяется цифровой фильтр (ЦФ).
Для применения в алгоритме обработки экспериментальных данных выбран нерекурсивный ЦФ, т.к. при этом выходной сигнал фильтра зависит только от значений входного сигнала, в отличие от рекурсивного, в котором зависит от предыдущих значений выходного сигнала [12].
Выбор полосы пропускания ЦФ определяется частотой полезного сигнала. Повреждения обмотки стато-
ра (витковые замыкания, обрыв параллельных ветвей) приводят к появлению тока ОП с частотой сети f1. Ток
ОП, обусловленный повреждением стержней ротора, имеет частоту [5]
f2 = f1(1-2S),
где S – скольжение АД.
Ограничившись режимами работы АД, при которых скольжение может изменяться от 0,001 до 0,1, получим, что при повреждениях обмотки ротора АД f2 = (0,8 - 0,998)f1.
Приняв диапазон изменения частоты питающего напряжения f1 =49 - 55 Гц и коэффициент надежности равным 1,1, с учетом вышесказанного выбираем полосовой ЦФ с полосой пропускания 30 - 60 Гц.
Таким образом, принят нерекурсивный ЦФ, имеющий следующие параметры:
- порядок фильтра – 100;
- частота дискретизации – 1000 Гц;
- верхняя граничная частота – 60 Гц;
- нижняя граничная частота – 30 Гц;
- тип фильтра – полосовой.
Правильность работы выбранного ЦФ проверена с помощью математического тестирования путем подачи на вход фильтра различных сигналов с помехами и анализа сигнала на выходе ЦФ.
На рис.4 приведены осциллограммы тока обратной последовательности без предварительной и с предварительной цифровой фильтрацией фазных токов АД привода дымососа типа ДАЗО–1910–12У1 Зуевской ТЭС, показывающие эффективность использования выбранного ЦФ.
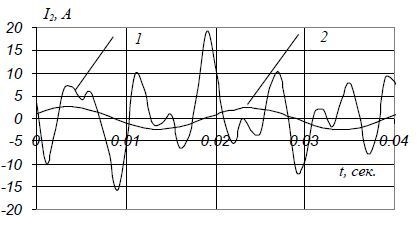
Рисунок 4 – Осциллограммы токов обратной последовательности без предварительной (1) и с предварительной цифровой фильтрацией (2) фазных токов АД привода дымососа
Реальный неповрежденный электродвигатель обычно имеет некоторую несимметрию, которую назовем естественной несимметрией электродвигателя. Эта несимметрия может быть вызвана как недостатками конструкции двигателя (например, разное количество витков по фазам или отклонение величины фазы токов от 1200), так и возникнуть после проведении ремонтных работ (например, после вырезания части поврежденных витков в одной из фаз обмотки статора). Так каждый процент вырезанных при ремонте АД витков дает примерно 2 % дополнительного тока обратной последовательности [13], а отклонение фазы одного из токов на каждый градус приводит к увеличению несимметрии на 0,6 %.
Вывод
Достоверность оценки технического состояния АД обеспечивается за счет использования наиболее информативного параметра – тока обратной последовательности. Достаточная точность определения этого тока может быть получена при применении 12-разрядного цифрового преобразования аналоговых сигналов и алгоритма двух выборок для расчета векторов токов и напряжений по их мгновенным значениям, а также при использовании разработанных алгоритмов, выполненных в виде программ, позволяющих отстроиться от влияния помех, несимметрии питающего напряжения и естественной несимметрии электродвигателя и сети, погрешностей элементов канала измерения АСТД.
Список использованной литературы
1. Брюханов Г.А., Князев С.А. Метод и устройство для диагностики состояния роторных обмоток асинхронных электродвигателей // Электрические станции. – 1986. – №2. – С. 44-45.
2. Гашимов М.А. Диагностическое исследование межвиткового замыкания в асинхронных электродвигателях // Электрические станции. – 1986. – №11. – С. 47-49.
3. Сивокобыленко В.Ф., Гребченко Н.В., Нури Абделбассет. Автоматизация диагностики стержней короткозамкнутых роторов асинхронных двигателей собственных нужд электрических станций // Сборник научных трудов Донецкого государственного технического университета. Серия: электротехника и энергетика, выпуск 2. – Донецк: ДонГТУ. – 1998. – С. 6-13.
4. Булычев А.В., Ванин В.К. Метод контроля состояния механической части асинхронного электродвигателя // Электротехника. – 1997. – № 10. – С.5-9.
5. Гашимов М.А., Аскеров Н.А. Выявление неисправности стержней ротора асинхронных электродвигателей // Электрические станции. – 1984. – № 8. – С. 60-66.
6. Гимоян Г.Г. Релейная защита горных электроустановок. – М.: Недра, 1978. – 349 с.
7. Корогодский В.И., Кужеков С.Л., Паперно Л.Б. Релейная защита электродвигателей напряжением выше 1 кВ. – М.: Энергоатомиздат, 1987. – 248 с.
8. Таран В.П. Диагностирование электрооборудования. – Киев: Техника, 1983. – 200 с.
9. Гребченко Н.В., Полковниченко Д.В. Экспериментальные исследования установившихся режимов работы асинхронных электродвигателей при наличии в них дефектов // Сборник научных трудов ДонГТУ. Серия: электротехника и энергетика, выпуск 17. – Донецк: ДонГТУ. – 2000. – С. 110-114.
10. Гребченко Н.В., Полковниченко Д.В., Нуайми Абделали. Программное восстановление первичного тока электромагнитных трансформаторов тока // Технічна електродинаміка. Спеціальний випуск. – Київ. – 1998. – С. 123-126.
11. Шнеерсон Э.М. Дистанционные защиты. – М.: Энергоатомиздат, 1986. – 448 с.
12. Шрюфер Э. Обработка сигналов: цифровая обработка дискретизированных сигналов: Учебник / Под ред. В.П. Бабака. – К.: Либідь, 1992. – 296 с.
13. Казовский Е.Я. Работа трехфазной машины переменного тока с асимметрией в обмотке статора // Вестник электропромышленности. – 1956. – №4. – С. 17-34.
14. ГОСТ–13109–87. Требования к качеству электрической энергии в электрических сетях общего назначения. – М.: Изд-во стандартов, 1988.