
Aperçu
Sommaire
- Introduction
- 1. Actualité de la thèse
- 2. Description du robot de Katana
- 3. Détermination de flux optique
- 4. Description de caméra Fire–i
- 5. Modèle de définition de flux optique
- 6. Le réseau neuronal
- Conclusion
- Bibliographie
Introduction
La developpement de la robotique est aujourd’hui un domaine qui ouvre beaucoup de perspectives à l’industrie.
Les robots accomplissent de nombreuses fonctions à la fois dans l'industrie et dans la vie quotidienne. Il y a plusieurs façons d’interagir entre un humaine et un robot. En raison du développement rapide de la photographie et de l'industrie vidéo, il est devenu possible d'utiliser différents appareils pour capturer la vidéo en robotique, et des connexions haut débit de permettre l'utilisation de dispositifs de vidéo pour une utilisation en temps réel.
La photographie et la vidéo ont connu un développement rapide. Il existe désormais de nombreux appareils performants permettant de capturer et de traiter l’information visuelle pour des tâches robotiques. De plus, les connexions haut débit en permette un usage en temps réel. Ce qui en fait l’une des branches les plus intéressantes de la robotique.
Le robot, équipé d'un système de vision par ordinateur, peut ainsi évaluer la situation et achever la tâche, en évitant les obstacles et les collisions, tout en transmettant ces informations à l'opérateur. La commande du robot est réalisé par le biais d’un réseau neuronal multi-couche.
1. Actualité de la thèse
La nouveauté se trouve dans l'utilisation de la vision par ordinateur pour les taches du contrôle par robot, ce qui permet au robot de s'adapter à l’environnement inconnue et d'effectuer les manipulations nécessaires sans intervention de l'opérateur.
2. Description du robot de Katana
L’objective consiste en creation d’un système de la commande par le bras robotique qui suivra et répètera les mouvements d’un agent interagit. Les parametres du mouvement seront extrait du flot optique re?u de caméra Fire-i embarqué et seront transmis au bras robotique. La compensation entre les mouvements du manipulateur et l'objet d'un moyen de réseau neuronal de rétropropagation sera réalisée.
L'objet de contrôle est un robot - manipulateur Katana 200 (Neuronics).Katana 2000 cédé par l’UCP а l’UNTD en 2010

Figure 1 – Robot – manipulateur Katana 200
Le Katana interface native (KNI) est une librairie logiciel libre pour commander le robot Katana. Le KNI est écrit en C++ et structuré de manière à ce que le portage vers d'autres langues et des cadres facile. Le code est maintenu indépendant de la plateforme et Uber peut à la fois sous Windows avec MS Visual Compilateur C++ et Linux avec le compilateur « GNU toolchain » être compilé. Le NCI résumés les couches sous-jacentes, ce qui permet de telles demandes à écrire pour le Katana, sans entrer dans les détails être impliqués dans le système. Les établissement de connexion et l'initialisation du robot se fait avec des appels de quelque fonctions. Le protocole pour commander par le robot à partir d'un ordinateur est complètement abstraite. La CBI comprend une mise en oeuvre de la cinématique de robots et des routines de calcul de trajectoire à de contrôler tous les axes de manière synchrone et aller avec les chemins de l'effecteur dans l'espace.L'ouverture de code source complet en fait l'outil idéal pour NCI recherche et l'éducation, puisque l'ensemble de la La mise en oeuvre reproduit à volonté et peut être modifié et adapté [8].
3. Détermination de flux optique
Les sources different, qui present l’information de flux optique, fait son definition pour se objet. Voila quelques une d’eux:
Flux optique ce dessin de visible mouvement des objet, surfaces au bord de la scene, qui obtient au resultat de deplacement d’observateur (yeux ou camera) par rapport de scene. [1]
Flux optique – c’est mouvement de pixels separe de video;
Mais pour la definition matematique de flux optique on analise le copcept de flux vectoriel.
Le champ vecteurelle est une matrice à deux dimensions de vecteurs binaires. Ils peuvent ?tre utilisés pour convertir les images dans lequel chaque vecteur représente la direction et l'intensité de la déformation géométrique locale. Les éléments d'un champ de vecteur peut être représenté comme une sorte d'instructions d'affectation symbole: dans chaque cas, le role de la variable joué le pixel situé au début du vecteur, et lui attribue une valeur est la couleur d'un fragment de l'image originale, ce qui indique un vecteur opposé à cela.
L'équation pour un pixel (x, y, t) avec l'intensité I d'un flux optique dimétrique peut être[2] :

Etant donné que les déplacements sont petits, nous utilisons une série de Taylor:

A partir de ces équations qu'il suit:

ou
En conséquence, nous obtenons:
Vx et Vy – les vitesses de changement de flux optique sur les coordonnées concernés.
4. Description de caméra Fire–i
Le flux optique, on obtient l'aide de caméra Fire–i.

Figure 2 – caméra digital Fire–i
Les avantages de la caméra:
- Multiple opération caméras et affichés simultanément sur le même PC;
- Partage de photos entre plusieurs PC;
- Images fixes ou des captures vidéo en continu, tout en surveillant;
- Stockage dans n'importe quel format d'encodage
- Faible consommation d'énergie;
- Bright (F 2,0), éléments en verre, 4,3 mm de longueur focale, de lentilles;
- Deux ports FireWire 400Mbps;
- Résolution de 640x480 vidéo.
5. Modèle de définition de flux optique
Dans un environnement Matlab, Simulink suivi mis en place et protement des flux optique pour les deux algorithmes, tel que décrit ci-dessus[4].

Figure 3 – Exemple d'un programme afin de déterminer le flux optique dans Simulink/Matlab

Figure 4 – Interpolation entre les cadres à trouver le flux optique
Voici les résultats du travaux des deux méthodes.
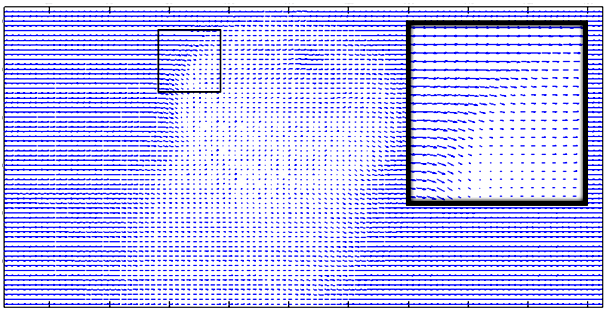
Figure 5 – Champ de vecteurs et de flux optique (algorithme de la Horne – Schunk)
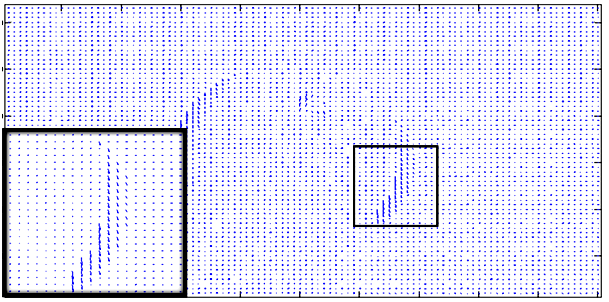
Figure 6 – Champ de vecteurs et de flux optique (algorithme de Lucas – Canada)
6. Le réseau neuronal
Le domaine des réseaux de neurones peut être considéré comme étant lié à intelligence artificielle, apprentissage automatique, traitement parallèle, les statistiques, et d'autres domaines. L'attraction des réseaux de neurones, c'est qu'ils sont le mieux adapté pour résoudre les problèmes qui sont les plus difficiles à résoudre par les méthodes traditionnelles de calcul.Un réseau des neurones est utilisé pour réduire au minimum l'erreur de position entre l'objet et le robot, qui répète le mouvement d'un objet[5]:
Se référant aux animation et figure 6, les fonctions réseau comme suit: Chaque neurone recoit un signal à partir des neurones dans la couche précédente, et chacun de ces signaux est multiplié par une valeur de poids séparé. Les entrées pondérées sont additionnées, et passé à travers une fonction de limitation dont les échelles de la sortie d'une plage fixe de valeurs. La sortie du limiteur est ensuite diffusé à tous les neurones de la couche suivante. Donc, pour utiliser le réseau de résoudre un problème,on applique les valeurs d'entrée aux entrées de la première couche, de permettre aux signaux de se propager à travers le réseau et de lire les valeurs de sortie.
Animation: 6 cadres, durée de chaque cadre - 80 ms, 56 Кб
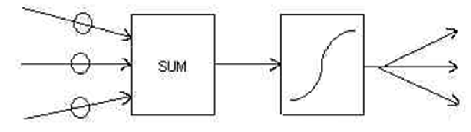
Fifure 7 – La structure d'un neurone
Depuis l'intelligence du réseau existe dans les valeurs des poids entre les neurones, nous avons besoin d'une méthode d'ajustement des poids pour résoudre un problème particulier. Pour ce type de réseau, l'algorithme d'apprentissage le plus commun est appelé Retropropagation.
Conclusion
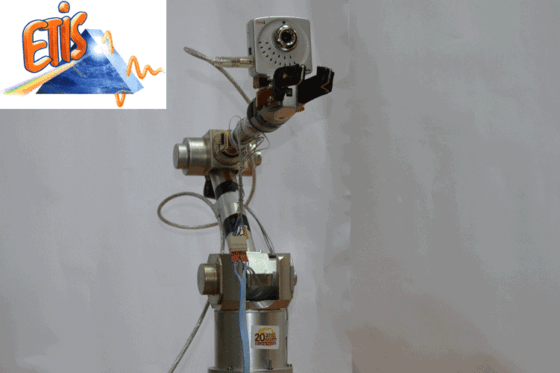
Figure 8 – Stand de la recherche
On a realise l’algorithme de commande du robot-manipulateur Katana en fonction d’un objet.On choisie et verifie les libraries nécessaire pour connecter le robot avec l’ordinateur. On fait les comparaisons entre les deux algorithmes principaux de flux optique dans le logiciel Simulink Matlab. On choisie le réseau de neurones pour commander un robot manipulateur. Les plans visant à poursuivre les recherches sur le stand de la figure 8.
Bibliographie
- Fleet D.J. , Weiss Y., Toptical Flow Estimation
- Horn K.P., Rhunck B. G., Determining Optical Flow, Artificial Intelligence Laboratory, Massachusetts Institute of Technology, Cambridge, MA 02139, U.S.A.
- Fire-i Digital Camera Specifications Fire-i Digital Camera
- Computer Vision System Toolbox Object Detection, Motion Estimation, and Tracking
- Tadeusiewcz R. "Sieci neuronowe", Principles of training multi-layer neural network using backpropagation, Krakow 1992
- Fahlman S.E., An Empirical Study of Learning Speed in Back-Propagation Networks
- Bouguet J.-Y., Pyramidal Implementation of the Lucas Kanade Feature Tracker Description of the algorithm
- Рябченко В.В., Дацун Н.Н. Использование моделирующей среды для создания программного обеспечения программно-аппаратного комплекса управления роботом-манипулятором семейства Katana фирмы Neuronics AG, Наукові праці Донецького національного технічного університету 14 (188), 2011. – 335 – 339
- Hasnain S. K., Gaussier P., Mostafaoui G., A synchrony based approach for human robot interaction. Paper accepted in Postgraduate Conference on Robotics and Development of Cognition (RobotDoC-PhD) organized as a satellite event of the 22nd International Conference on Artificial Neural Networks ICANN 2012. Lausanne, Switzerland, 10–12 September, 2012
- Computer Vision System Toolbox Object Detection, Motion Estimation, and Tracking