Evaluation of a mobile manipulator arm by disabled people
The
authors:
Sébastien Delarue, Ornella Plos, Philippe Hoppenot, Etienne
Colle
Source:
Advancement Assistive of
Technology in Europe (AAATE), San Sebastian : Spain (2007)
The
authors:
Sébastien Delarue, Ornella Plos, Philippe Hoppenot, Etienne
Colle
Source:
Advancement Assistive of
Technology in Europe (AAATE), San Sebastian : Spain (2007)
ARPH project deals with restoring object manipulating and grasping function for upper limb handicapped people. The system is a semi autonomous mobile arm manipulator designed keeping in mind specificities due to a close cooperation between human and machine. In order to take into account the diversity of situation three kinds of control modes are proposed to the user. The paper focuses on the evaluation of ARPH system by disabled people in situation close to daily living. Several types of information were obtained concerning use, interface, ergonomics, safety and training. It should be noted that the phase of familiarisation during which the people were free to use the robot with their own way was particularly interesting for the usage foreseen by the designers of the product and the need for physical exchanges with others that the robot by its capacities of displacement and contact makes it possible to recreate...
In the domain of assistive robotics for handicapped people, we can find many kinds of systems. Our interest goes on manipulator arm based ones, allowing manipulation of any kind of objects by the user. We find static systems which can only operate in a limited space such as MASTER project [1] . In an other way, it’s possible to fix a manipulator on a wheel chair as in FRIEND system [2] . In this case, the operating space is increased but the user has to move with the arm. In this article, we focus on an autonomous mobile manipulator arm such as MOVAID [3] . So, user can remotely control the system even if he is not in his wheelchair. This mobile system takes into account human factors by presenting various autonomy abilities (trajectory planning, obstacle avoidance) and helpful control modes.
First, we present the system ARPH and the associated control modes. Secondly, we describe protocols used for evaluation of the system and then we present the results and analysis derived from these evaluations. We then conclude on the efficiency of the ARPH system.
ARPH (Figure 1.a) is a mobile robot for assistance to handicapped people. It is composed of a mobile platform with two driving wheels and equipped with a manipulator arm called MANUS (6 degrees of freedom). An ultrasonic sensors belt makes possible to localize the robot in the environment and to avoid obstacles. The system is remotely controllable via customer/server architecture and a wireless WIFI network. Therefore it is equipped with a pan-tilt camera.
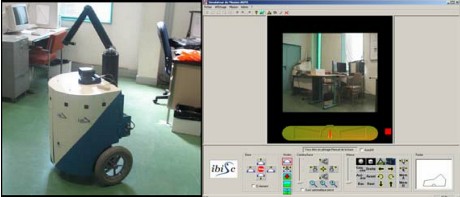
Figure 1 – ARPH system (a) and Human-Machine Interface (b)
The user interface shown on Figure 1.b is installed on a distant computer. Users can control using different control modes.
It is possible to add obstacle avoidance capacity (of the mobile base) to these modes. Thus, using the belt ultrasound, the mobile platform can avoid the obstacles while keeping for principal objective the direction imposed by the user. This is particularly useful for displacements in the corridors. In this configuration, the user asks for a simple walk before and the mobile platform moves while remaining automatically in the middle of the corridor.
The evaluation was carried out in two parts: a first phase in situation close from daily living situations called experimental conditions and the second phase in totally ecological situation called evaluation in ecological conditions ([6],[7] ).
Protocol aimed at evaluate ARPH system in a way as close as possible from daily living conditions. It understood three parts, all of them corresponding to go and get back a glass, a bottle or a pack of cookies in different starting and ending situations. 7 quadriplegic users have participated on a random way to the evaluation. Six of them only have produced results we could make use of.
Before the tests, subjects have to answer a semi directed questionnaire. Then, they had a learning phase in which they can manipulate the system after a complete explanation of its functionalities and the presentation of the Human-Machine Interface. This took about 30 minutes to 45 minutes, depending on the persons. After the evaluation period, a new questionnaire was proposed to the subjects.
During the learning phase, three kinds of activities have been observed:
Technical aids most important criteria:
Utility: Before manipulation, 5 persons out of 6 thought the system should be useful for daily living activities. After manipulation, they were 6 of them to find it useful. Concerning usefulness of fitting the manipulation arm to the wheelchair, 4 users out of 6 think it is more interesting to fix it on the wheelchair. All of them have indicated the usefulness of the mobile base when they are in their bed for picking up forgotten objects. Figure 2 points out importance of independence gain either at home or in a crowdy location (supermarket, leisure), both cases corresponding to situations of daily living they cannot get away from.
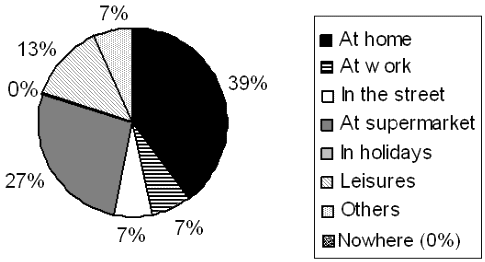
Figure 2 – Distribution of places where people would use the system
Ease of use: All users have carried out all tasks, only number of tries differs. For example, to go and get back a glass 5 out of 6 users have succeeded in the first attempt.
Satisfaction level: Several detailed data have been collected concerning robot, interface, arm and base ease of use, as well as driving complexity and tiredness evaluation according to the different tasks. All in all, 4 users out of 6 have been satisfied, one very satisfied, one more or less satisfied.
Same kind of evaluation has been driven at a user home, one in-sight, the other off- sight.
Global time for activity realization has been improved. Performances between first try and second try increase from 30% to 60% depending on activity actions (Figure 3).
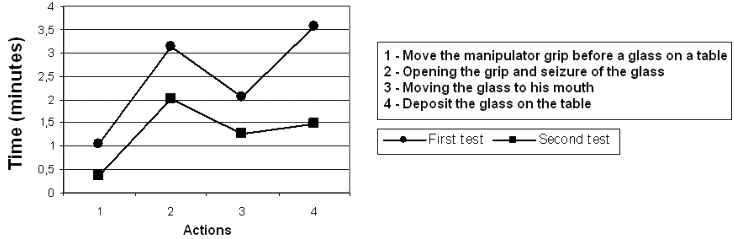
Figure 3 – Time to achieve activity
It is interesting to note that a lot of complementary comments have been collected in spite of the fact we have been able, up to now, to evaluate only one user in these ecological conditions. It could have occurred that this specific person had a more accurate analysis but, obviously, to make able a user to achieve tests in the environment he is used to live in allows to get other pertinent comments.
For instance, he has objected that two many successive operations was needed to achieve an action, to bring a cup to his lips, so this was asking for too many concentration and, consequently, was subject to generate a lot of manipulation errors. That clearly points out that HMI has to be reconsidered to bring more automated phases, taking care, at the same time, not to let the user without control when necessary. We have also noticed that the user was frequently referring to stress, fear, not for himself but for manipulated objects. In this precise case, it was a cup with great sentimental attachment) that we had not observed at such a level from non ecological evaluations. The off-sight activity has highlighted the necessity to find a way to bring reference marks and movement scale to the user through video system as well as the absolute need for a true real time visualization system.
These evaluations show the interest of a mobile arm manipulator for handicapped people. The system was well accepted and people debates more about efficiency than about look or safety. What is important for them is to get back power on the world by restoring manipulation ability and physically interact with other people. People would like to use this system in many situations (home, supermarket). They think the system is globally easy to use even if some tasks as seizure need more cognitive effort. These evaluations show us (researchers, designers) what can be changed on the system. Users ask for semi automatic modes for seizure to help them in associating mental scheme with manual actions proposed by the actual system. They would like a global controlling mode allowing us to move the grip without driving the base (it has to move automatically). Even if users didn’t spoke about safety, we have to make effort to avoid collision between the arm and the environment by proposing safely procedures while moving the base.