Автоматизація на SIMATIC S7
Автор: Войтко В.К.
Источник: Збірник рефератів робіт всеукраїнського конкурсу студентських наукових робіт з галузі знань „Електротехніка та електромеханіка”, Дніпродзержинськ, 2012 г. – с.11
Автор: Войтко В.К.
Источник: Збірник рефератів робіт всеукраїнського конкурсу студентських наукових робіт з галузі знань „Електротехніка та електромеханіка”, Дніпродзержинськ, 2012 г. – с.11
На сьогоднішній день проблеми автоматизації роботи механізмів дуже актуальні та нові. Складність програмування систем з великою кількістю електроприводів і невелика досліджувана якість цього питання в літературі відкривають для дослідника широкий простір для діяльності.
Проектування та програмування спрощеної моделі вже відомої системи «Вертикальна пакувальна машина». Ця машина дуже широко використовується на виробництві та здійснює упаковку певної продукції, наприклад цукерок, в поліетиленові пакети.
Ознайомившись з вертикальною пакувальною машиною на виробництві , я визначив для себе основні кроки для створення спрощеної моделі установи для подальшої автоматизації та аналізу її роботи. На рисунку 1 зображена загальна схема моделі. Де 1 – бункер для завантаження продукції , яка переміщатиметься по конвеєру 3 в бункер 4 , який обладнаний поворотним механізмом для розподілу продукції в фурми 7 для подальшого упакування. Упакована продукція переміщатиметься до кінцевого пункту по конвеєру 8. Для приведення конвеєрів та поворотного механізму в рух використовуються двигуни постійного струму 5,6 та 9. Розрахунок двигунів та візуалізацію процесу буде виконано в дипломному проекті.
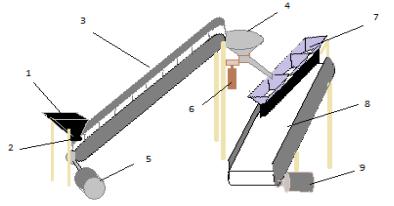
Рисунок 1 – Загальна схема процесу
В ході виконання роботи була створена програма на мові Step 7 та діаграму її функціонування. Діаграма зображена на рисунку 2.
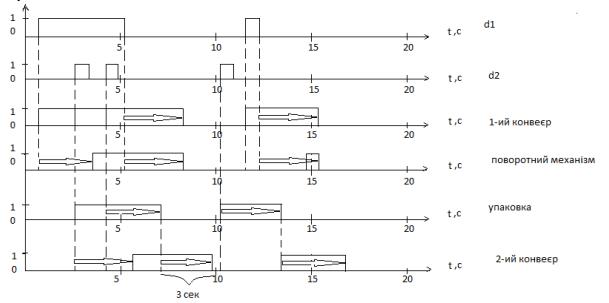
Рисунок 2 – Діаграма роботи системи
В програмі були використані таймери в яких було зсимульовано роботу конвеєрів , поворотного механізму та процесу упакування . Рух першого конвеєра починається одразу після появи на ньому продукції( датчик d1) та триває ще 3 секунди після закриття першого бункера. Рух поворотного механізму закінчується при зупинці першого конвеєра, а починається через 3 секунди після відкриття бункера 1. Упаковка 1 величини продукції здійснюється впродовж 3 секунд і починається при спрацьовуванні датчика d2 (поява продукції в фурмах) Одразу після упаковки по другому конвеєру готова продукція впродовж 3 секунд переміщується до кінцевого пункту
Об’єктом дослідження даної роботи була вертикальна пакувальна машина серії CVM 85. В результаті роботи ми створили спрощену модель системи , запрограмували її за допомогою середовища пакета Simatic S7, проаналізували її роботу на прикладі діаграми.
1. Вертикальные упаковочные машины
2. Конспект лекцій по курсу « Промислові системи управління».