Автор: D.S. Tawil, D. Rye, M. Velonaki
Автор перевода: А.А. Пугач
Improved EIT drive patterns for a robotics sensitive skin
Источник: D.S. Tawil, D. Rye, M. Velonaki. Improved EIT drive patterns for a robotics sensitive skin // Australasian Conference on Robotics and Automation (ACRA), December 2-4, 2009, Sydney, Australia. – pp. 425-435.
Аннотация
Электрическая импедансная томография (ЭИТ) является методом, который используют для оценки внутренней проводимости электропроводящего тела, используя только измерения на его границах. Если тело состоит из тонкого, гибкого и эластичного материала, который реагирует на локальные изменения в проводимости, он может быть использован для создания искусственной чувствительной кожи, при этом предполагалось, что электроды находились только на границе тела. В тонкой чувствительной коже, электроды могут быть расположены внутри тела. Эта статья сравнивает существующие модели искусственной кожи, в которых электрод находится внутри тела. Результаты моделирования показывают, что размещение электрода в центре тела может улучшить разрешение и устойчивость к шумам при восстановлении изображения.
1. Введение
Как растут способности роботов так и растет заинтересованность в создании роботов, которые могут взаимодействовать с людьми более естественными способами; например робот Kismet [Breazeal, 2003], которое отображает и понимает эмоции человека. Роботы, такие как Fish-Bird [Velonaki et al., 2005] показали, что люди, естественно, стремятся взаимодействия через прикосновение и ожидают реакции роботов на тактильный раздражители. Ученые так же разработали роботов с базовым «пониманием» и реакцией на прикосновение; некоторые примеры Paro the seal [Wada et al., 2002], Huggable [Stiehl and Breazeal, 2005], и Hapticat [Yohanan et al., 2005]. Эти роботы не напоминают реальных животных, тем самым уменьшая ловушки сверхъестественной природы.
Касания является перворазвитым и крупнейшим из всех человеческих чувств. Наш организм буквально покрыт миллионами различных рецепторов осязания; наши мышцы, суставы и органы все связаны с нервами, которые постоянно посылают информацию в мозг. Почти все, что мы делаем, в том числе ходим, разговариваем, сидим и целуемся основано на прикосновениях; невозможно представить себе жизнь без них.
Интерпретация касаний между людьми является очень сложным и настоятельно продиктована рамками взаимодействия, наряду с коммуникативной культурой, эмоциями и убеждениями [McDaniel and Andersen, 1998]. Ранние работы про социальные взаимодействия [Heslin, 1974] показали, что люди извлекают определенные характеристики от тактильных раздражителей, которые взаимодействуют разными сообщениями, и что толкование прикосновения зависит от таких факторов, как модальность, место, продолжительность, интенсивность и частота прикосновений.
В робототехнике важно разработать метод сенсорной идентификации, который может быть активным на всех или большинстве участков тела робота; это может быть сделано с использованием чувствительной искусственной кожи. Функциональные требования к искусственной коже являются спорными, и в какой-то степени должны зависеть от применения робота. В литературе, понятие искусственнойй чувствительной кожи, как правило, рассматривается как гибкий [Minato et al., 2007], растяжимый [Hoshi and Shinoda, 2006] массив датчиков, которые расположены на изогнутой поверхности робота. В существенной степени имеет способность чувствовать тактильную информацию, такую как давление [Shimojo et al., 2004], расстояние [Stiehl and Breazeal, 2005], температуру [Stiehl and Breazeal, 2005], скольжение и текстуру. Кожа может быть мягкой [Mukat, 2004] и должна чувствовать себя "хорошо", при прикосновении. Для реализации этого в робототехнике, все оборудование должно быть включено в робота и программное обеспечение должно работать в реальном времени.
С первого всеобъемлющего выяснения понятия “чувствительной кожи" Владимиром Люмельским [2001], учеными робототехниками, внесшими свой вклад из нескольких прототипов искусственной чувствительной кожи, которая обычно состоит из ряда дискретных датчиков, [Mukai et al., 2008] связанных индивидуально или в сетевых конфигурациях [Papakostas et al., 2002], способные реагировать на прикосновения, температуру [Stiehl and Breazeal, 2006] и другие физические явлений. Подходы к зондированию в диапазоне от использования органических полевых транзисторов ЕЭТЧ (OFETs) [Someya et al., 2006] или пьезоэлектрических полупроводников [Mukai et al., 2008] до преобразователей, которые используют емкость [Chang et al., 2006], пьезоэлектричество [Ishiguro and Nishio, 2007] или оптику [Nicholls, 1991], и последнее использование в электрическая импедансная томография [Kato et al., 2007].
Электрическая импедансная томография (ЭИТ) [Holder, 2005] это визуализация, используемая для оценки внутренней проводимости электропроводящего тела, используя только измерения, выполненные на границе тела. Если проводимости в теле изменяются, нынешнее распределение также изменения и СПЭ может применяться для количественной оценки этих изменений. Применение СПЭ для чувствительной кожи, было ранее описано в Kato et al. [2007], Nagakubo et al. [2007] and Alirezaei et al. [2009]. Эти исследования электродов, расположенных на границе прорезиненной ткани, которая реагирует на давление с локальными изменениями в сопротивлении. Применяя ЭИТ, изменения в сопротивлении и, следовательно, давление может быть определенно. Поскольку большинство чувствительных областей состоит из однородного тонкого материала без каких-либо проводов, гибкая и растягивающаяся "кожа" может быть реализована..
Математически задача ЭИТ - реконструкция некорректной нелинейной обратной задачи, в которой основное сложность заключается в том, что реконструированное изображение не обязательно уникальное и стабильное: небольшие изменения в данных (например, электрических помех) может привести к большим изменениям в реконструкции. Существует распространенное мнение, что электроды могут быть расположены только на границе в тонкой чувствительной коже, однако, электроды могут легко находиться в организме, а также на границе. В данной статье проводится сравнение разных моделей активного измерения потенциала, которые были использованы и в которых контрольный электрод находится внутри тела чувствительной кожи. Результаты моделирования показывают, что электрод в центре тела улучшает разрешение восстановленного изображения и его стабильность в присутствии шума.
2 Электрическая импедансная томография
EIT-это метод, используемый, в основном, в медицинских целях для оценки внутренней теплопроводности внутренних органов человека, используя только измерения, выполненные на коже человека. Как правило, различные электроды размещаются на грудной клетке человека и небольшой переменный ток подается через два электрода. Ток будет течь не только между двумя электродами, но и в целом по проводящему телу; в результате измеряется потенциал на всех электродах . Локальные изменения внутренней проводимости тела изменяется, в результате изменения потенциала на границе. Повторяя эти шаги и сканирование вокруг различными парами электродов, можно рассчитать распределение тока внутри тела через обратное решение уравнений Максвелла. Медицинский образ может быть построен с различными структурами внутри человеческого тела обладающего разными сопротивлениями. Если постоянный ток используется вместо переменного тока и тот же метод, метод называется электрическая резистивная томография (ERT).
Проблемой реконструкции ЭИТ является проводимость внутри объекта, когда ряд введенных потоков и получающихся потенциалов известен. Первый из предложенных методов для реконструкции - метод резервной проекции [Barber et al., 1992], линейный, неитерационный метод, в котором эквипотенциальный объем между парой электродов (рисунок 1) является резервным, спроектированным и записанным по всей граница тела. Этот метод похож на рентген-компьютерную томографию (КТ), основная разница в том, что в ЭИТ ток не движется по прямой линии, но движется в областях между истоком и стоком. Хотя резервная проекция была очень успешной для простой 2D геометрии, число детерминированных алгоритмов, основанных на матрице Якоби (от границы потенциальных внутренних проводимостей) дискретных были выведены на первый план.
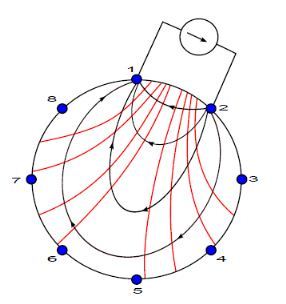
Рисунок 1: Подобие эквипотенциальных линий (красные) для кругового 2D тела с текущим введением через пары соседних электродов.
По сравнению с другими методами визуализации (например, рентгеновские КТ), ЭИТ / ERT представляется более сложной, потому что матрица Якоби, что касается внутренних дел проводимости возмущений для измерений потенциалов на электродах, очень плохое состояние и небольшие изменения в данных могут привести к значительным и непредсказуемым изменениям в восстановленном изображении.
Прямая задача может быть получена путем решения эллиптических частичных дифференциальных уравнений Лапласа

со смешанными граничными условиями Дирихле и Неймана. В результате прямой задачи:

где σ- электропроводность, u-электрический потенциал, n- единичный вектор внешней нормали к границе (∂Ω) и j является отрицательно нормальной составляющей введенного тока плотностью Js, или просто вводимого тока.
Завершенная модель электрода [Vauhkonen, 1997] considers the existence of a discrete number of electrodes of finite size. Измеряемая величина Vl на l-ном электроде равен сумме потенциалов на границе поверхности под электродом, что позволяет электроду связаться с сопротивлением zl. Эта модель также указывает, что плотность тока по поверхности s электродов составляет ток Il через электрод. Полная модель электрода:
Кроме того, для обеспечения единственности решения сохранения заряда теоремы должно выполняться

вместе с возможностью выбора произвольного заземления

2.1 Числовая аппроксимация
Данная техника широко используется для решения системы частных дифференциальных уравнений (1-5) методом конечных элементов (МКЭ). Метод основан на преобразовании непрерывной формы задачи дискретной аппроксимации построенной как набор конечных элементов K с постоянной проводимостью между собой через N узлов. Применение метода конечных элементов [Silvester and Ferrary, 1983] и перестановки системы конечных элементов уравнений в представлении матрицы приводит к

где где U - это вектор потенциалов в узлах N конечного элемента

так же известна как симметричная матрица проводимости. Эта матрица связывает каждый из К элементов с ее составным узлом и ее проводимостью. Дополнительная информация [Vauhkonen, 1997; Holder, 2005].
Для завершения системы, а также обеспечения единственного решения, передовая модель должна включать формы введенные в текущую

таким образом ток, введенный в тело, равняется потоку, погруженному.
2.2 Обратная задача и восстановление изображений
Функциональные требования к искусственной чувствительной коже в области робототехники являются спорными. Ясно, одно, что интеграция кожи на всей или большей части поверхности тела робота будет потенциально улучшать возможности робота для взаимодействия через прикосновение. Для достижения цели такой как сбор данных и интерпретация алгоритма все должно выполняться в реальном времени.
Динамического отображение [Adler and Guardo, 1996] является быстрым, не итерационным методом визуализации, который уменьшает возможные проблемы с неизвестным сопротивлением контакта и неточной позицией электрода [Lionheart, 2004]. Суть метода заключается, в том что для начала необходимо определить начальное состояние потенциалов σ0 для предполагаемого однородного тела с «известной» проводимостью. Дискретная модель заменяется линейной аппроксимацией для вычисления только разностной величины (δσ) в случае неоднородности. Затем, после вычисления матрицы Якоби J между изменениями потенциальной и внутренней проводимости, дискретная форма задачи становится линеаризованной.

где n - вектор шума; δVl является разностными потенциалами между двумя измерениями: в случае однородности и неоднородности.
Так малый ток проходит через все элементы, значения составляющих матрицы Якоби будут близки к нулю. Деление на такие маленькие величины вызывает числовую чувствительность, поэтому для решения необходимо, чтобы небольшие изменения во взвешенных потенциалах могли вызвать большие изменения в восстановлении; это некорректная задача должна быть решена путем регуляризации.
Неформально, регуляризация означает, что дополнительная информация вводится таким образом, чтобы некорректная задача могла быть заменена более корректной задачей. Для ЭИТ дополнительная информация обычно является предположением, и что она постепенно меняется.(δσ) is slowly changing, smooth or `blocky' [Kolehmainen et al., 1997].
Широко используется метод регуляризации по Тихонову, в котором плохо обусловлена проблема

произведем замену

где α скалярный гиперпараметр, который управляет количеством регуляризаций и R является регуляризации матрицы, которая управляет гладкости решения
Для этого исследования, обобщенные регуляризации А. Н. Тихонова, представленные в [Adler and Guardo, 1996; Holder, 2005; Adler and Lionheart, 2006], которые используются; это решение имеет такой вид:

где W является матрицей взвешивания для фиксированной начальной σ матрицы Якоби и формула (JTWJ + α2RTR) которая может быть рассчитана в автономном режиме, значительно ускоряет решение...
4 Выводы
Сенсорная интерпретация осязательный чувств является весьма сложной. При внедрении искусственной чувствительной кожи для роботов, мы должны учесть несколько требований, которые в определенной степени зависит от применения робота. Эта работа была сосредоточена на развитие чувствительной кожи на основе ЭИТ для всего тела, главной целью является внесение вклада в улучшение взаимодействия роботов с человеком через прикосновение.
Электрическая импедансная томография - техника отображения, в которой внутренняя проводимость тела может быть оценена при использовании только измерений на его границе. Если эта техника применена в тонком, гибком и поддающийся растягиванию материале, который отвечает на прикосновение с местными изменениями проводимости, можно считать что искусственная чувствительная кожа создана. К сожалению, плохо изложенная обратная задача, в которой небольшие изменения в измерениях могут вызвать большие непредсказуемые изменения в реконструкции; особенно в центре тела, где менее всего электрического тока.
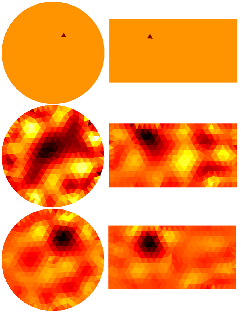
Рисунок 9 - Реконструкция для различных дисковых образов
Эта работа показала, что добавление в центр электродов повышает разрешение, проводимость вдоль тела и надежность в реконструкции. Кроме того, центр координат для всех измерений напряжения значительно упрощает аппаратную реализацию в разрешений параллельных измерений, следовательно, сокращение сбора данных.
Этот документ также внес ряд показателей, которые могут быть использованы для оценки эффективности изображения ЭИТ с точки зрения местоположения и разрешение одним электродом. Эти показатели также характеризуют способность различать электроды, распологаемые в разных местах на чувствительной коже.
Хотя испытания проводились, когда контрольные электроды были расположены в разных местах внутри тела, лучшее разрешение и устойчивость к шуму было получено с контрольного электрода, размещенного в центре тела, где ожидались наихудшие показатели.
Будущая работа могла будет направлена на определение лучшего местонахождения электрода в более сложных конфигурациях. Кроме того, количество электродов могут быть увеличены для улучшения разрешения в областях, которые имеют большие геометрические размеры.
References
[Adler and Guardo, 1996] A. Adler and R. Guardo.
Electrical impedance tomography: regularized imaging and contrast detection. IEEE Transactions on
Medical Imaging, 15(2):170-179, Apr. 1996.
[Adler and Lionheart, 2006] Andy Adler and William
R B Lionheart. Uses and abuses of EIDORS: an extensible software base for EIT. Physiological Measurement, 27:S25-S42, 2006.
[Alirezaei et al., 2009] H. Alirezaei, A. Nagakubo, and
Y. Kuniyoshi. A tactile distribution sensor which enables stable measurement under high and dynamic
stretch. IEEE Symposium on 3D User Interfaces 2009,
pages 87-93, Mar. 2009.
[Avis and Barber, 1994] N J Avis and D C Barber. Image reconstruction using non-adjacent drive configurations. Physiological Measurement, 15:A153-A160,
1994.
[Barber et al., 1992] D.C. Barber, B.H. Brown, and N.J.
Avis. Image reconstruction in electrical impedance tomography using filtered back projection. Proceedings
of the Annual International Conference of the IEEE
Engineering in Medicine and Biology Society, 5:1691-1692, Oct. - Nov. 1992.
[Breazeal, 2003] Cynthia Breazeal. Toward sociable
robots. Robotics and Autonomous Systems, 42:167-175, 2003.
[Chang et al., 2006] W. Chang, K. E. Kim, H. Lee, J. K.
Cho, B. S. Soh, J. H. Shim, G. Yang, S.-J. Cho, and
J. Park. Recognition of grip-patterns by using capacitive touch sensors. In IEEE International Symposium
on Industrial Electronics, volume 4, pages 2936-2941,
2006.
[Demidenko et al., 2005] E. Demidenko, A. Hartov,
N. Soni, and K.D. Paulsen. On optimal current patterns for electrical impedance tomography. IEEE
Transactions on Biomedical Engineering, 52(2):238-248, Feb. 2005.
[Geselowitz, 1971] David B. Geselowitz. An application of electrocardiographic lead theory to impedance
plethysmography. IEEE Transactions on Biomedical
Engineering, BME-18:38-41, 1971.
[Graham and Adler, 2006] B M Graham and A Adler.
Objective selection of hyperparameter for EIT. Physiological Measurement, 27:S65-S79, 2006.
[Heslin, 1974] R. Heslin. Steps toward a taxomony of
touching, May 1974. Paper presented to the annual
meeting of the Midwestern Psychological Association,
Chicago, IL.
[Holder, 2005] David S Holder. Electrical Impedance Tomography. Institute of Physics Publishing, Bristol and
Philadelphia, 2005.
[Hoshi and Shinoda, 2006] T. Hoshi and H. Shinoda. A
sensitive skin based on touch-area-evaluating tactile
elements. Haptic Interfaces for Virtual Environment
and Teleoperator Systems, 2006 14th Symposium on,
pages 89-94, Mar. 2006.
[Ishiguro and Nishio, 2007] Hiroshi Ishiguro and Shuichi
Nishio. Building artificial humans to understand humans. Journal of Artificial Organs, pages 133-142,
2007.
[Kaipio et al., 2007] Jari P Kaipio, Aku Seppnen, Arto
Voutilainen, and Heikki Haario. Optimal current patterns in dynamical electrical impedance tomography
imaging. Inverse Problems, 23:1201-1214, 2007.
[Kato et al., 2007] Y. Kato, T. Mukai, T. Hayakawa,
and T. Shibata. Tactile sensor without wire and sensing element in the tactile region based on EIT method.
In IEEE Sensors 2007, volume 2, pages 792-795, Oct.
2007.
[Kolehmainen et al., 1997] V. Kolehmainen,
M. Vauhkonen, P.A. Karjalainen, and J.P. Kaipio. Spatial inhomogeneity and regularization in
EIT. In Engineering in Medicine and Biology Society,
1997. Proceedings of the 19th Annual International
Conference of the IEEE, volume 1, pages 449-452
vol.1, Oct-2 Nov 1997.
[Lionheart, 2004] William R B Lionheart. EIT reconstruction algorithms: pitfalls, challenges and recent
developments. Physiological Measurement, 25:125-142, 2004.
[Lumelsky et al., 2001] Vladimir J. Lumelsky, M.S.
Shur, and S. Wagner. Sensitive skin. IEEE Sensors
Journal, 1(1):41-51, Jun. 2001.
[McDaniel and Andersen, 1998] Ed McDaniel and Peter A. Andersen. International patterns of interpersonal tactile communication: A field of study. Nonverbal Behavior, 22:1, 1998.
[Minato et al., 2007] Takashi Minato, Yuichiro
Yoshikawa, Tomoyuki Noda, Shuhei Ikemoto, Hiroshi
Ishiguro, and Minoru Asada. Cb2: A child robot
with biomimetic body for cognitive developmental
robotics. 7th IEEE-RAS International Conference on
Humanoid Robots, 1:557-562, 2007.
[Mori, 1970] Masahiro Mori. Bukimi no tani [The uncanny valley]. Energy, 7(4):33-35, 1970. In English:
K. F. MacDorman and T. Minato (translate).
[Mukai et al., 2008] T. Mukai, M. Onishi, T. Odashima,
S. Hirano, and Zhiwei Luo. Development of the tactile
sensor system of a human-interactive robot RI-MAN.
IEEE Transactions on Robotics, 24(2):505-512, Apr.
2008.
[Mukat, 2004] T. Mukat. Development of soft areal tactile sensors for symbiotic robots using semiconductor
pressure sensors. Proceedings of ROBIO 2004. IEEE
International Conference on Robotics and Biomimetics, pages 96-100, Aug. 2004.
[Nagakubo et al., 2007] A. Nagakubo, H. Alirezaei, and
Y. Kuniyoshi. A deformable and deformation sensitive tactile distribution sensor. Proceedings of ROBIO
2007. IEEE International Conference on Robotics and
Biomimetics, pages 1301-1308, Dec. 2007.
[Nicholls, 1991] H.R. Nicholls. Tactile sensing for
robotics. IEE Colloquium on Robot Sensors, pages
5/1-5/3, Jan. 1991.
[Papakostas et al., 2002] T.V. Papakostas, J. Lima, and
M. Lowe. A large area force sensor for smart skin applications. Proceedings of IEEE Sensors 2002, 2:1620-1624, 2002.
[Persson and Strang, 2004] Per-Olof Persson and
Gilbert Strang. A simple mesh generator in matlab.
SIAM Review, 46:2, 2004.
[Shi et al., 2006] Xuetao Shi, Xiuzhen Dong, Wanjun Shuai, Fusheng You, Feng Fu, and Ruigang
Liu. Pseudo-polar drive patterns for brain electrical
impedance tomography. Physiological Measurement,
27:1071-1080, 2006.
[Shimojo et al., 2004] M. Shimojo, A. Namiki,
M. Ishikawa, R. Makino, and K. Mabuchi. A
tactile sensor sheet using pressure conductive rubber
with electrical-wires stitched method. IEEE Sensors
Journal, 4(5):589-596, Oct. 2004.
[Silvester and Ferrary, 1983] P.P. Silvester and R.L Ferrary. Finite Elements for electrical engineers. University of Cambridge, 1983.
[Someya et al., 2006] T. Someya, T. Sakurai, and
T. Sekitani. Large-area electronics based on organic
transistors. 64th Device Research Conference, pages
209-210, Jun. 2006.
[Stiehl and Breazeal, 2005] Walter Dan Stiehl and Cynthia Breazeal. Aective touch for robotic companions.
Proceedings of Aective Computing and Intelligent Interaction (ACII-05), 3784:747-754, 2005.
[Stiehl and Breazeal, 2006] Walter Dan Stiehl and Cynthia Breazeal. A sensitive skin for robotic companions featuring temperature, force, and electric field sensors.
Proceedings of IEEE/RSJ 2006. International Conference on Intelligent Robots and Systems, pages 1952-1959, Oct. 2006.
[Vauhkonen, 1997] Marko Vauhkonen. Electrical
impedance tomography and prior information. PhD
thesis, 1997.
[Velonaki et al., 2005] M. Velonaki, D.C. Rye, S.J.
Scheding, and S.B. Williams. Fish-bird: Autonomous
interactions in a new media arts setting. In Proceedings of Vital Signs, 2005.
[Wada et al., 2002] K. Wada, T. Shibata, T. Saito, and
K. Tanie. Analysis of factors that bring mental eects
to elderly people in robot assisted activity. Proceedings of IEEE/RSJ 2002. International Conference on
Intelligent Robots and System, 2:1152-1157, 2002.
[Wheeler et al., 2002] James L Wheeler, WeiWang, and
Mengxing Tang. A comparison of methods for measurement of spatial resolution in two-dimensional circular EIT images. Physiological Measurement, 23:169-176, 2002.
[Xu et al., 2008] Canhua Xu, Xiuzhen Dong, Xuetao
Shi, Feng Fu, Wanjun Shuai, Ruigang Liu, and
Fusheng You. Comparison of drive patterns for single current source EIT in computational phantom. In
Proceedings of ICBBE 2008. The 2nd International
Conference on Bioinformatics and Biomedical Engineering., pages 1500-1503, May 2008.
[Yohanan et al., 2005] Steve Yohanan, Mavis Chan,
Jeremy Hopkins, Haibo Sun, and Karon MacLean.
Hapticat: Exploration of aective touch. Proceedings of ICMI'2005. International Conference on Multimodal Interfaces, pages 222-229, 2005.