Энергоэфективное управление трехфазным асинхронным двигателем – Обзор.
Перевод с английского: Соседко В.А.
Источник: International Journal of Computer and Electrical Engineering, Vol. 1, No. 1, April 2009
Авторы: C. Thanga Raj, S. P. Srivastava, Pramod Agarwal
Аннотация – Благодаря прочности, надежности, низкой цене и простому техническому обслуживанию, асинхронные электродвигатели получили наибольшее применение в промышленности. Влияние этих двигателей (в роли потребления энергии), в энергоемких отраслях занимает значительное место. Эта статья представляет собой обзор разработок в области повышения эффективности использования трехфазных асинхронных двигателей за счет оптимального управления и методов проектирования. Оптимальное управление включает в себя широкие подходы, а именно контроль потерь по модели и поисковый контроль. Оптимальное проектирование включает разработку модификаций материалов и конструкций с целью оптимизации эффективности двигателя. Использование методов искусственного интеллекта, а именно таких как искусственные нейронные сети, нечеткая логика, экспертные системы и естественные алгоритмы, генетические алгоритмы и дифференциальной эволюции в оптимизации, также включены в эту статью. Также проиллюстрированы экспериментальное моделирование и примеры эффективности оптимизации.
Ключевые термины – оптимизация конструкции, асинхронный двигатель, оптимальное управление, быстродействующее програмное обеспечение.
I Введение
Асинхронный двигатель является высоко эффективной электрической машиной при работе на ее номинальном крутящем моменте и скорости. Тем не менее, при малых нагрузках, нет баланса междупотерями в меди и стали, в результате значительное снижение эффективности. При частичной нагрузке КПД и коэффициент мощности может быть улучшена путем корректировки возбуждения двигателя в соответствии с нагрузкой и скоростью. Для реализации указанной цели, асинхронный двигатель должны быть либо подается через инвертор или переработан с оптимизация алгоритмов.
Оптимизации конструкции асинхронного двигателя с исскуственным интелектом и естественными алгоритмами уделялось большое внимание в последнее время. Конструктивная оптимизация трехфазного асинхронного двигателя может быть решена методами нелинейного программирования и стандартный нелинейного программирования. Но эти методы вычислений очень дорогие и неэффективные, в то время как естествнные алгоритмы является компетентным инструментом для решения нелинейного програмирования. Обширная работа была произведена над конструкцией питаюшего асинхронный электродвигатель инвертором, для того, чтобы реализовать колебающийся крутящий момент и гармонический ток. Некоторые конструкционные результаты оптимизации имеются в [1] – [23].
В оптимальном управлении существует два основных подхода к повышение эффективности работы асинхронного двигателя на малых нагрузках, а именно: контроль потерь по модели [24] – [65], поисковый контроль [66] – [80] для минимальных затрат энергии. В литературы [81] – [83] описан как выполняется контроль потерь по модели и поисковый контроль, [84] – [89] описан другой оптимизационный контроль эффективностью асинхронного ддвигателя и [90] – [95] описанние плавного пуска для улучшения характеристик двигателя. Контроль потерь по модели определяет оптимальный поток воздуха через зазор по модели двигателя. В случае поискового контроля, он измеряет мощность привода и производит поиск оптимального потока возбуждения или тока возбуждения.
Эта статья описывает различные виды оптимизации в том числе методов мягких вычислений для эффективной оптимизации асинхронных двигателей в разделе II, оптимальная конструкция асинхронного двигателя приводится в разделе III, обзор контроля потерь по модели и поискового контроля эффективности оптимизации приведены в разделе IV и V соответственно, и эта работа завершается в разделе VI.
II Методы оптимизации
Оптимальная конструкция асинхронного двигателя это множество нелинейных задач измерея, в то время как оптимальный контроль – одна или две задачи измерения. Поэтому роль методов оптимизации является более важным в конструкции, чем контроль мгновенными значений для получения глобального оптимума.
А. Обычные методы оптимизации
Статистический метод [1], метод Monto Corlo [2], минимизация последовательной технической непринужденности [11], [12] изменения крюка Jeeves [3], метод Han Powel [4], модифицированый метод Han Powel[5] и несколько методов, которые применялись успешно в конструкции асинхронного двигателя в прошлом.
Б. Базовые методы оптимизации
Существует много типов контроллеров с исскуственным интелектом применяется для оптимизации контроля над асинхронным двигателем, а также разработки и имеющиеся в литературе [35], [36], [63], [77] – [80]. Некоторые контроллеры на нечеткой логике [653], [77] – [80], исскственной нейронной сети [35], [36]. Быстрая конвергенция может быть достигнута за счет этих контроллеров.
C. Естесственные алгоритмы базовых методов оптимизации
Естесственные алгоритмы есть относительно новое прибавление к классу базовых стохастических исследований техники основаных на однородных организовывающих процессах в природе и человеческих деятельности. Наиболее популярными естесствеными алгоритмами являются генетические алгоритмы [61], [62], [18], Рarticle Swarm Optimization(PSO) [48]–[51], [23], Эволюционный Алгоритм [98], иммитация отжига [19], [22], и стратегическая эволюция [21]. Естесственные алгоритмы кажутся перспективными, за их социально – совместный подход и их способности адаптироваться в постоянно меняющейся окружающей среде.
III Конструктивная оптимизация асинхронного двигателя
А. Обычные алгоритмы
В работе [6], метод крюка Jeeves поиска используется для поиска оптимальной конструкции асинхронного двигателя. Эффективность стоимость рассматриваются как целевые функции. Авторы проанализировали последствия изменения напряжения питания в двигателе на производительность и пришли к выводу, что повышение эффективности может быть получен за счет увеличения напряжения. Условие были рассмотрены в [7], следующие изменения помогли прийти к минимуму энергии, при этом длина сердечника статора увеличится до 130%, а количество обмотки статора уменьшится на 10%.
Оптимизация конструкции гидравлического насоса в авиационно–космической промышленности была рассмотрен в [8]. Частота питающей сети, окружающей среды, пусковой ток считаются ограничеными. Два уровня оптимизации проведено в работе [9], с точки зрения затрат материальных и других эксплуатационных расходов.Глобальный подход оптимизации был введен в [10]. Здесь ошибка воспринимается как целевая функция для максимизации эффективности. Если ошибка не больше, размер шага используется для корректировки переменных.
метод минимизации последовательностей непринужденности был успешно применен для оптимизации асинхронного двигателя в [11], [12]. пульсации крутящего момента были рассмотрены в [11] в качестве дополнительного ограничение для конструкции инвертора питающего двигатель. Авторы предложили, что поток и высшие гармоники токов столь должны быть низкими, чтобы иметь минимум пульсаций. Реактанс должен быть незатухающий по меньшей мере в 4 раза больше, чем у нормальной машины. Кроме того, чтобы иметь минимум пульсаций, выберается больше глубина сердечника статора ,глубже слот ротора и больше расточка диаметра статора.
В работе [13], ограничен метод Розенброка для оптимизации двигателя. Авторы рассматривают стоимость материалов как целевую функцию и пришли к выводу, что более высокие значение плотности тока, необходимое для получения оптимального значения. От шести до четырех полюсов машин были выбраны для регулирования скорости до 3600 оборотов в минуту, необходимые рекомендации предложены в работе [14].
Последовательное квадратичное программирование для нелинейной техники ограниченой оптимизации была успешно реализован в конструкции [15]. В данной работе авторы практическими соображениями свесли вычисления времени. Ниже приведены практические соображения [15],
—Влияние начальных векторов:
Здесь начальные значения переменных с их нижним предел, верхним предел и промежуточными значениями. Анализ был проведен в целях итерации значений функции. Значения переменных, доступных в литературе также рассматривается для анализа. Из четырех сочетание переменных, верхний предел изменения предлагает плохие результаты при запуске, но хорошие результаты при окончательной итерации.
—Влияние велечены шага:
Авторы отмечают, что размер шага для увеличения значения переменных слишком мал (менее 0,001) или слишком большой (больше 0,1) ухудшает результат в асинхронном двигателе мощностью 30кВт и рекомендуется установить значение 0,005 в качестве шага, чтобы получить хорошие результаты.
—Влияние ограничений:
Как утверждают авторы, нет четкой разницы между различными наборами ограничений.
—Влияние изменения целевой функции:
Авторы рассмотрели различные типы влияний функций на эффективность, коэффициент мощности, крутящий момента и заметили, что эффективность немного снизилась, когда крутящий момент считался целевой функцией.
—Изменение переменных и параметров производительности в итерации:
Авторы установили все переменные и верхние пределы проанализировав выполнение параметров, связанных с итерацией. По наблюдению, эффективность и мощность были почти те же, что и в последующей итерации.
Потери в меди статора и основные гармонические потери уменьшаются при оптимальном выборе конутрукции паза статора [16]. Авторы использовали метод конечных элементов для снижение основных потерь в обмотке на 2,22%. Эффективность асинхронного двигателя была улучшена в [17], изменив производственый технологический процесс и стоимость. Она не требует полной перестройки конструкции. Авторы модифицировали полностью закрытый обдуваемый вентилятором стандартный асинхронный двигатель, в ротора с медной обмоткой включены пазы с алюминиевой литой клетью, (II) увеличение основного осевой длины, (III) отжига сердечника статора. Авторы решили, что производство более эффективных двигателей значительно уменьшается производственно технологическую стоимость.
Б. Исскуственный интелект и естественные алгоритмы в базовых алгоритмах
Применение генетические алгоритмов для конструкции асинхронных двигателей привела к 25% сокращению общей стоимости. Большинство естесственных алгоритмов были рассмотрены в [18] максимизации эффективности асинхроннх двигателей. Гибридизация эволюционного программирование и имитации отжига также предложены и применены к конструкции асинхронных двигателей [19]. Здесь эволюционное програмирование используется для поиска оптимальной точки. Авторы заключили, что эволюционное прграмирование имитации отжига была выполнена хорошо, если гибридизация не применяется.
Эволюционный алгоритм был применен в работе [20] и получил хорошие результаты по времени схождения / глобальной конвергенции и способность обрабатывать дискретные переменные. Улучшенная стратегия эволюции (ES) имеет были рассмотрена в [21] для конструкции двигателя служит для электрических транспортных средств. Колебания были включены, чтобы избежать локальных минимумов, которые появляются в обычных еволюционных стратегиях. В работе [22] авторы использовали для разработки иммитации отжига асинхронного двигателя и пришли к выводу иммитации отжига, что более эффективен, чем традиционные методы. Улучшенная Рarticle Swarm Optimization с интерполяцией квадратичной был использован в [23].
IV Оптимальное управление асинхронным двигателем по модели потерь
Оптимальное управление асинхронным двигателем является существенным, потому что оно должно оптимизировать КПД двигателя для каждой операционной точки оптимизации конструкции машины. Во многих устройствах постоянной скорости, асинхронный двигатель работает под частичной нагрузки для продления периода, таких, как спиннинг диск текстильной промышленности [24], шахтных подъемных установки, перфораторов. В этих устройствах, асинхронный двигатель должен работать на уменьшеном потоке, что вызывает баланс между потерями в железе и потерями в меди, как простейший результат повышения эффективности. Методом повышения эффективности асинхронного двигателя является работа на нагрузку в соединении звезда , что в результате снизить энергопотребление. Когда мотор запущен в режиме звезда, напряжение на обмотке статора фазы снижается на коэффициент корень из 3. Поскольку крутящий момент, развиваемый в двигателе прямо пропорциональна квадрату напряжения, развитый крутящий момента в режиме звезда также уменьшается на коэффициент в корень из 3. Таким образом, двигатель может работать в режиме звезды до 0,33 о.е. нагрузки.
В этом случае развитый момент двигателя должна быть измерян и найден достаточный для приведения в действие системы управления и также измерять температуру до нормальной. Даже если этот метод не подходит для широкого спектра переменных нагрузкок, он по–прежнему является применим во многих агрегатах текстильной промышленности в Индии. Здесь нет коммутационных потерь в связи с отсутствием контроллеров силовой комутации.
Контроллер необходимдля измерения скорости и тока статора и определяет оптимальный поток воздушного зазора в связи с моделью потерь двигателя. Внутренняя часть, алгоритм управления, может быть в скалярным [25] – [45] или векторным [46] – [65]. В скалярном управлении, переменные контролируются только по величине во времени,а в векторном управлении, переменные контролируются по величине и фазе. Комплекс индукции двигателя может быть смоделирован как двигатель постоянного тока, выполняя простые преобразования в схеме управления вектором.
Искусственный интеллект, как нечеткие логика, также может быть использован для нахождения оптимального уровня потока за минимальное время. В этом подходе требуются точные значения параметров машины в том числе их изменения из–за основных потерь основных и главных потерь на насыщение индуктивности. Рис. 1 [24] показывает различные части потерь в асинхронных двигателях. Многими исследователям были зарегистрированы несколько стратегий с использованием различных переменных для минимизации потерь в аснхронном двигателе. Некоторые алгоритмы используют скорости скольжения [24], [29], [30], поток ротора [54], [55], ток возбуждения [52], напряжения [31]. Блок–схема системы управления скоростью с оптимальной энергетикой и с использованием нечеткой логики показано на рис. 2. Здесь нечеткой логики используется для поддерживать хорошую устойчивость привода при изменении потока на оптимальное управление.
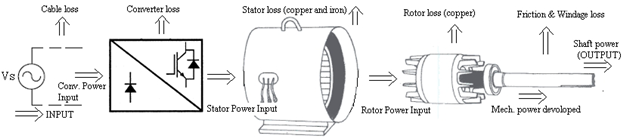
Рисунок 1 – Потери в асинхронном электроприводе
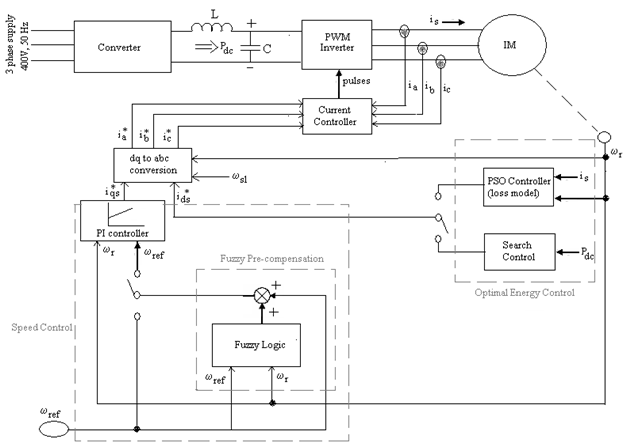
Рисунок 2 – Блок–схема системы управления скоростью,с использование PSO и нечеткой логики
А. Скалярные регулируемые приводы
Поведение привода переменного тока описывается тремя независимыми переменными: скоростью, терминал напряжение, терминал частоты и параметры двигателя с его питающей мощностью [25]. В любой рабочей точке характеризуется скоростью и крутящим моментом, можно определить оптимальный поток (другими словами, соотношение напряжения и частоты), что отвечает требованиям операционной точки и сводит к минимуму общие потери. Потери асинхронного двигателя представлены сопротивлениями в эквивалентной схеме на рис. 3 [26]. Паразитные потери нагрузки представлены эквивалентным сопротивлением RSTR со стороны статора. Как и на рис. 3, потери мощности в сопротивлении зависит от тока статора и должны быть измерены для вычисления оптимального потока воздушного зазора, а также, чтобы избежать чрезмерного тока в двигателе [27]...