МОБИЛЬНЫЙ РОБОТ «КОАЛА» ДЛЯ РЕШЕНИЯ ТЕХНИЧЕСКИХ ЗАДАЧ
Авторы: А.А. Мельник, Ю.Н. Петровичева
Источник: Конференция Донбасс – 2020 ДонНТУ / Материалы VI Международной научно-практической конференции студентов, аспiранов и молодых учёних. – Донецк, ДонНТУ – 2012, Том 6, с. 132–136.
А.А. Мельник, Ю.Н. Петровичева. МОБИЛЬНЫЙ РОБОТ «КОАЛА» ДЛЯ РЕШЕНИЯ ТЕХНИЧЕСКИХ ЗАДАЧ. В статті показані можливості мобільних роботів, на прикладі робота «Коала» («Ка-Тім», Швейцарія), по переміщенню у просторі, розглянуті шляхи розв’язання прикладних задач із використанням модулів розширення. Навігація у просторі та аналіз даних щодо навколишнього середовища здійснюється на підставі теорії штучних нейронних мереж.
Введение.
Развитие робототехники в последнее время отмечается сразу по нескольким направлениям. Приоритетное направление, которому уделяется основное внимание в последние несколько десятков лет, – это создание высокопроизводительных промышленных роботов целевого назначения (автомобилестроение, металлургия, кузнечное производство, машиностроение и др.) с элементами очувствления, с возможностью самообучения и др.Рост производства во всем мире в различных отраслях промышленности ведет к нарушению экологического равновесия в природе, к увеличению числа аварий и аварийных ситуаций. Аварии на шахтах на больших глубинах, на химических комбинатах, предприятиях переработки требуют анализа текущей обстановки и физико-химического анализа атмосферы в зоне инцидента.
В большинстве случаев отсутствует возможность направить сразу специалистов в очаг повреждения (поражения). Поэтому первым в зону аварии должны быть направлены мобильные роботы-разведчики, которые возьмут пробы грунта, воздуха, проведут фотографирование в районе очага повреждения или в режиме «on-line» передадут изображение с места повреждения/аварии.
Цель работы. Показать возможности мобильных роботов, на примере робота «Коала» («Ка-Тим», Швейцария), по оценке состояния окружающей среды, по возможности перемещения в незнакомом пространстве, запоминании его конфигурации и возможности повторения перемещения в прежнее положение с обходом появившихся препятствий. Материал и результаты исследования. Прототипом робота Koala «Коала» («Ка-Тим», Швейцария) является робот «Кипера» («Ка-Тим», Швейцария) [1, 5], который первоначально рассматривался как объект базовых (тривиальных) исследований и изучения разработанных алгоритмов по заданию траектории перемещения и объезде препятствий, а также, используя информацию сенсоров, формирование гипотез поведения робота в различных условиях. В состав робота «Кипера» входило необходимое программное обеспечение для управления, наблюдения текущего состояния сенсоров и внесения пользовательских настроек.
Однако, робот «Кипера», диаметр которого составлял 50 мм, вследствие своих малых размеров не мог быть использован для реализации практических задач.
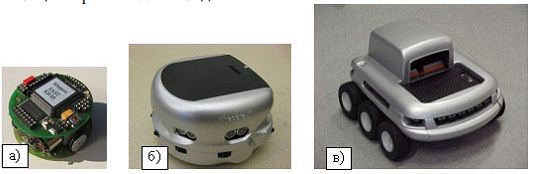
Рис. 1. Разработки компании «Ка-Тим» (Швейцария): а) первое поколение мобильного робота «Кипера»; б) мобильный робот «Кипера III»; в) мобильный робот «Коала».
Улучшенной модификацией робота «Кипера» является робот «Коала», размеры которого составляют 30х30см. Главным отличием и достоинством робота Коала является возможность его практического применения, он способен нести на себе больше дополнительных модулей и аксессуаров. Увеличение числа модулей расширения позволяют роботу адаптироваться к широкому классу задач: задание положения; регулирование параметров перемещения; навигация в знакомом, частично знакомом и незнакомом пространствах; распознавание объектов, оценка параметров среды без участия человека, перемещение объектов в пространстве.
Робот «Коала» используется как базовый для разработки и создания интеллектуальной мобильной системы, т.е. для решения проблем навигации. Последняя состоит в способности мобильных роботов к планированию и реализации, которая в общем случае может иметь размытые очертания. В таких условиях САУ роботом должна быть в состоянии понять и оценить структуру этой среды. Для достижения своих целей без столкновений, роботы должны быть наделены восприятием - системой датчиков, обработкой данных,
Обучением, мышлением, интерпретацией, способностью принятия решений и потенциалом различных действий.
Для решения задач навигации используются алгоритмы, базирующиеся на методологии теории нейронных сетей [2] для планирования столкновений со стационарными препятствиями в структурированной среде. Решение этой задачи возможно в том случае, если в управлении роботом будут задействованы датчики, определяющие положение последнего, система обработки данных, интеллектуальная система с элементами самообучения и принятия решений.
На рис. 2 приведены робот «Коала» с информационной камерой и этапы получения информации и её обработки.
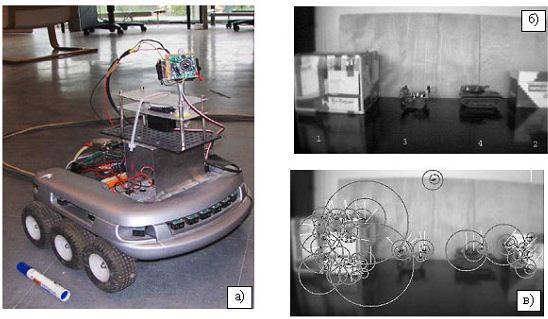
Рис. 2. Мобильный робот «Коала» оборудованный камерой для получения информации об окружающем пространстве (а) и иллюстрации этапов получения и обработки (б,в)
Как отмечалось выше, алгоритмы управления роботом «Коала» построены на базе теории нейронных сетей. На рис.3 показан принцип организации искусственной нейросети для решения задачи управления перемещением на плоскости с учетом информации с датчиков сенсорной группы.
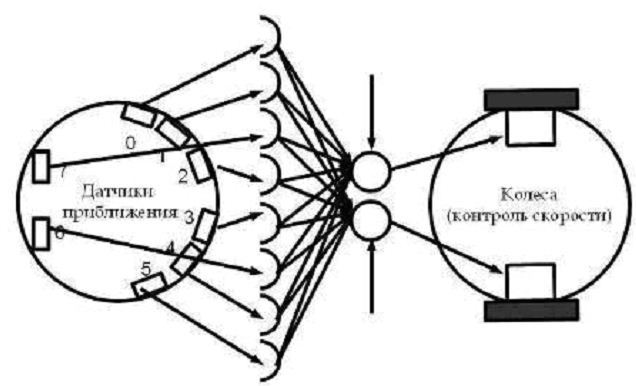
Рис. 3. Принцип работы нейросети при решении задачи управления движением
После ряда тренингов, проведенных для обучения системы в плане распознавания объектов, возможность на основании данных датчиков сенсорно-моторной группы сформировать задание на направление и скорость передвижения, причём задание на скорость идёт по двум каналам управления: правым и левым приводными двигателями. С учётом угла отклонения (аоткл) закон изменения частоты вращения двигателя может быть записан в виде:
где wзад - задание на угловую скорость; wп, wл - частоты вращения правого (+) и левого двигателей (-).
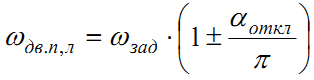
Робот «Коала» может быть оснащён специальными датчиками для взятия проб в базовой среде. В случае аварийных ситуаций на промышленных предприятиях в условиях агрессивной среды «Коала» будет незаменимым помощником, так как в его памяти может быть введена карта задымлённости, служащая эталоном для сравнения с реальной газовой средой, отбираемой для проб датчиками. Например, робот «Коала» оборудован стереоскопическим устройством наблюдения, а также датчиками запаха, расположенными на левой и правой сторонах рамы крепления аксессуаров рис.4. Камера позволяет реализовать неконтролируемую систему наблюдения, а датчики запаха позволяют определить природу и параметры газа в среде. Описанная система может применяться при авариях в химическом производстве без участия человека.
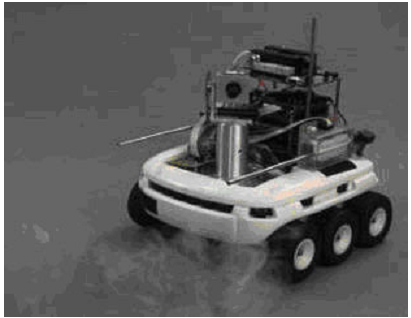
Рис. 4. Мобильный робот «Коала» с устройством наблюдения и также двойным датчиком запаха
Выводы
Очевидно, что базовая модель робота «Коала» обладает широкими возможностями в плане навигации в незнакомой среде (оценке среды и обхода препятствий), определение задымлённости и вида газа, помощи людям с нарушениями органов зрения и движения. В отмеченных направлениях и планируется дальнейшее совершенствование системы управления и алгоритмов, учитывающих контакт со средой и человеком.
Библиографический список
1. F. Mondada, E. Franzi. and A. Guignard. (1999) The Development of Khepera. Experiments with the Mini-Robot Khepera, HNI-Verlagsschriftenreihe, Heinz Nixdorf Institut, vol. 64. p. 7-14
2. F. Mondada, P. Verschure. Modeling system-environment interaction: the compli-mentary roles of simulation and real world artifacts, ECAL'93 , Brussels, pp 808-817, March 1993.
3. M. Maillard, L. Hafemeister, P. Gaussier. Formalisme et mesure de la perception : IntMrxt de la dynamique sensori-motrice chez un agent robotique, Gretsi-05, 2005.
4. M. Maillard, O. Gapenne, Ph. Gaussier, and L. Hafemeister. Perception as a dy-namical sensori-motor attraction basin. In Capcarrere et al., editor, Advances in Artificial Life (8th European Conference, ECAL), volume LNAI 3630 of Lecture Note in Artificiallntelligence, pages 37-46. Springer, sep 2005.
5. K-Team Corporation | Mobile Robotics [Электронный ресурс] / Manufacturer of education and research robots in Europe; K-Team Corporation, 2010 Режим дос-тупа: http://www.k-team.com/, свободный. — Загл. с экрана. — Яз. англ.