Исследование динамических свойств регулируемого объёмного гидропривода механизмов перемещения очистных комбайнов
Автор: д.т.н., проф. В.Г. Гуляев, магистрант С.Ю. Харламов
Источник: Уголь Украины, 2010, № 12, с. 22 - 30.
Автор: д.т.н., проф. В.Г. Гуляев, магистрант С.Ю. Харламов
Источник: Уголь Украины, 2010, № 12, с. 22 - 30.
В настоящее время в угольной отрасли Украины и странах, имеющих запасы угля, все более насущными становятся вопросы создания наиболее перспективных средств механизации угольных пластов.
Выемочные комбайны проектируются под высокую теоретическую производительность, реализация которой становится возможной при автоматизации их работы. В выемочных машинах в первую очередь должно применяться автоматическое плавное регулирование скорости подачи в зависимости от нагрузки двигателя. В качестве объекта регулирования используется механизм подачи на основе объемного гидропривода.
Схема автоматического регулирования скорости подачи "Эйкоматик" имеет вид представленный на рис. 2, где
1- трансформатор тока; 2- устройство сравнения; 3- задатчик тока;4- усилитель; 5- задатчик скорости; 6- гидравлический усилитель; 7- гидравлический установочный прибор; 8- гидравлический серводвигатель; 9- главный электродвигатель; 10- исполнительный орган; 11- подпиточный насос; 12- гидронасос; 13- гидродвигатель подачи; 14- ведущая звезда.
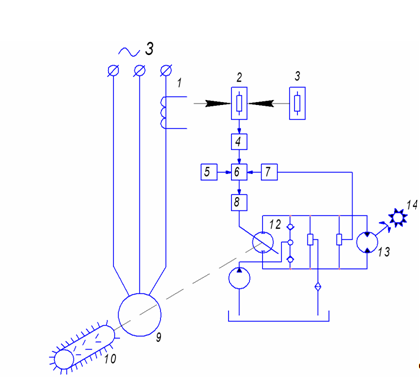
Рисунок 2 – Схема автоматического регулирования скорости подачи "Эйкоматик" (ФРГ)
В подсистемах механизмов перемещения (ПМП) очистных комбайнов с упругим (ЦСП) и жестким (БСП) тяговым органом находит широкое применение регулируемый объемный гидропривод. Обычно регулируемым параметром является переменный эксцентриситет радиально-плунжерного насоса или угол наклона диска аксиально-плунжерного насоса.
На рис.3 показаны принципиальная (а), расчетная (б) и структурная (в) схемы объемного гидропривода ПМП ОК.
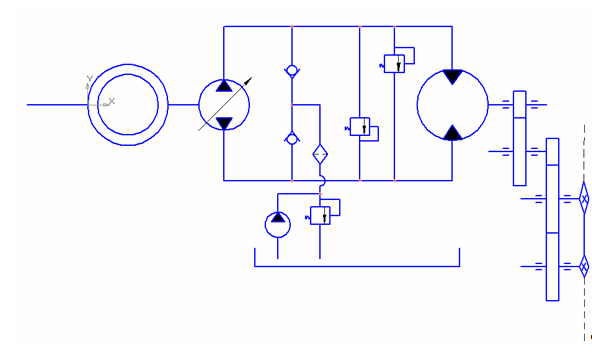
а)
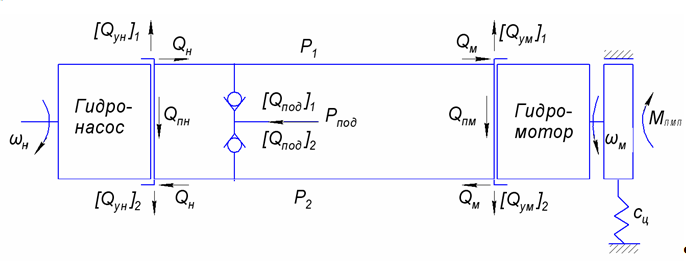
б)
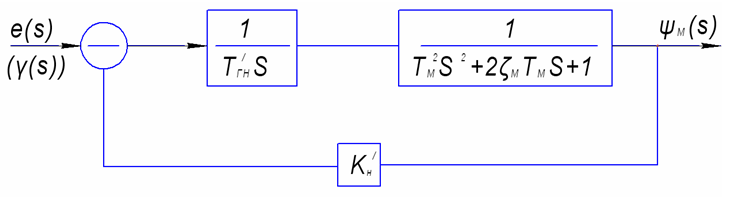
в)
Рисунок 3 - Принципиальная (а), расчетная (б) и структурная (в) схемы гидропривода ПМП
Зависимость скорости установившегося движения ненагруженного гидропривода от величины параметра регулирования статической скоростной характеристикой (или характеристикой регулирования скорости объемного гидропривода):

где Qн - теоретическая подача насоса; qгм - рабочий объем гидромотора;
Отношение рабочих объемов насоса и гидромотора (гидравлическое передаточное число гидропередачи):
Параметр регулирования по рис. 4:
Для гидромотора с реверсируемым потоком жидкости

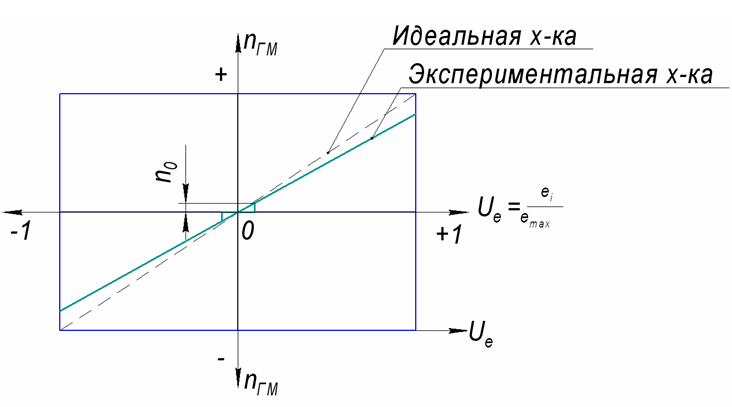
Рисунок 4 – Скоростная характеристика объемного гидропривода
На рис.4 через n0 обозначена минимальная устойчивая скорость гидромотора. Она обусловлена сжимаемостью и утечками жидкости, инерцией ротора и автоколебаниями в гидромоторе на "ползучих" скоростях, при "падающей" зависимости трения от скорости (разность между трением покоя и движения в поршневых группах и других элементах гидромотора). Таким образом, строго говоря, скоростная характеристика - нелинейная, однако зона ползучих скоростей (0-n0) не является рабочей, см. рис. 4.
Статическая механическая характеристика регулируемой гидропередачи показывает зависимость между скоростью вращения гидромотора и моментом его нагрузки при различных значениях параметра регулирования Ue, рис. 5.
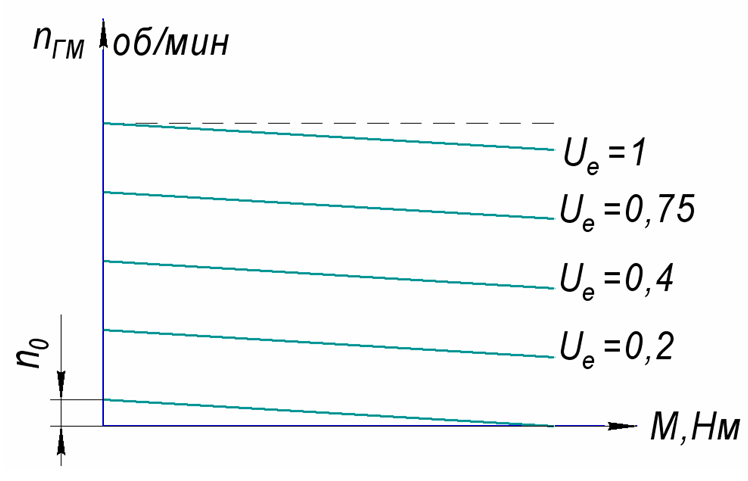
Рисунок 5 – Механическая характеристика объемной гидропередачи

или

где ан,агм - коэффициенты утечек в насосе и гидромоторе; Р=Р1-Р2 - перепад давления на гидромоторе; М и Км - момент гидромотора и коэффициент момента.
Уравнение нагрузки гидромотора механизма подачи МП очистного комбайна при

Оно соответствует режимам с ускоренным и замедленным вращением гидромотора.
где (Р1-Р2)qгм - момент гидромотора; Iгм - момент инерции гидромотора; m - масса комбайна; r - радиус ведущей звезды; i - передаточное число редуктора МП; Mcмп - момент сопротивления.
Уравнение движения комбайна можно представить в виде
где mx - сила инерции; Сц - коэффициент жесткости цепи (тягового органа); (rф-x) - упругая деформация тягового органа; Fтр - сила трения; Fпx - проекция на ось Х полезных сил сопротивления (резания и подачи); mg sin(a) - продольная составляющая силы тяжести комбайна в пласт с углом наклона a.
Момент сил сопротивления на валу гидромотора можно записать в виде:

Для гидрообъемной передачи и гидромотора нагрузку (момент) на его валу можно рассматривать как внешнее возмущение, действующее на «входе» в ПМП ОК.
Как известно [1,2], что даже при отсутствии полезной нагрузки на ИО комбайна, т.е. Fпx=0, момент Мспм, формирующийся на валу гидромотора, можно считать случайной функцией, так как, при изменяющемся случайным образом коэффициенте трения в опорах комбайна, кинетическая характеристика трения является стохастической не зависимо от жесткости тягового органа.
Общая закономерность падающей зависимости силы трения от скорости скольжения сохраняется, однако численные значения функции кинетической характеристике трения при одних и тех же значениях аргумента могут изменяться. Следует также отметить, что система "комбайн - конвейер - тяговый орган", является системой с переменным упругим параметром: с перемещением комбайна непрерывно изменяется длина рабочего участка тягового органа, а следовательно, и коэффициент жесткости, что приводит к изменению собственной частоты колебаний системы, см. рис.6.
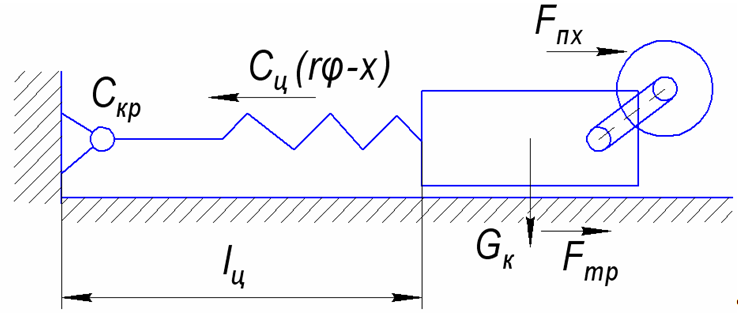
Рисунок 6 – Динамическая модель процесса перемещения ОК

 - коэффициент жесткости системы, зависит от длины тягового органа и жесткости узла крепления к головке конвейера рабочей ветви цепи.
- коэффициент жесткости системы, зависит от длины тягового органа и жесткости узла крепления к головке конвейера рабочей ветви цепи.
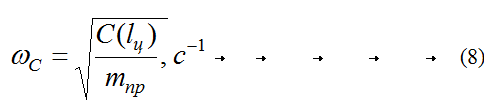
Так, например, для комбайна 1ГШ-68 с Gк=14500 кг; Cц=5100000 кг/м; q=13,6 кг/м; Cкр=1000000 кг/м зависимость wс=(С(lц)/mпр)^1/2, графически можно представить в виде падающей кривой при увеличении длины цепи, рис.7.
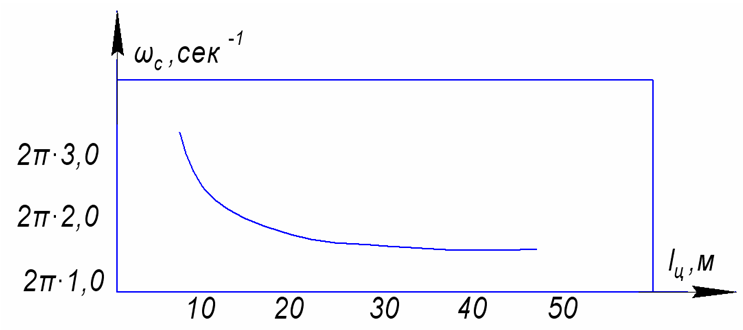
Рисунок 7 – Зависимость собственной частоты ОК от длины цепи
Таким образом, частота автоколебаний скорости подачи и момента изменяются в зависимости от длины рабочего участка тягового органа.
Составляющая суммарного момента сил сопротивления на валу гидромотора

где a и b - коэффициенты, отражающие конструктивные особенности ИО; т - время запаздывания.
Fпx*r соответствует процессу резания угля и имеет, как известно, явно стохастический характер. Таким образом, нагрузка на входе гидромотора должна описываться вероятностными характеристиками, одной из которых является спектральная плотность нагрузки:
Согласно теории случайных функций и статистической динамики линейных систем, спектральная плотность нагрузки на выходе (в данном случае в гидронасосе):
где W(jw) - частотная характеристика системы "насос - гидромотор - движитель ОК".
Следовательно, дисперсия нагрузки в гидроприводе, характеризующая амплитуду переменной составляющей выходного параметра (например, давления) может быть вычислена по формуле:
Таким образом, динамические нагрузки в системе объемного гидропривода ПМП определяются не только внешним воздействием, но и в значительной степени динамическими свойствами привода, т.е. его амплитудно-частотными характеристиками.
Иными словами, соотношение между амплитудой колебаний давления в системе "насос-гидромотор" МП и амплитудой периодических составляющих момента нагрузки на валу гидромотора (ведущей звезды движителя) зависит от частоты нагрузки.