Исследование кинетической характеристики трения в опорах комбайна с цепным тяговым органом
Автор: В.Г.Гуляев, К.В.Жуков, А.О.Артемьева
Источник: Наук. Вісник нац.гірн. академії України. – 1998. - №4, С. 54-57.
Автор: В.Г.Гуляев, К.В.Жуков, А.О.Артемьева
Источник: Наук. Вісник нац.гірн. академії України. – 1998. - №4, С. 54-57.
Ключевые слова: опоры очистного комбайна, кинетическая характеристика трения, релаксационные автоколебания
В настоящее время весьма актуальной научной и практической задачей оптимального проектирования очистных комбайнов является разработка имитационных моделей, адекватно отражающих главные особенности динамики их рабочих процессов. При разработке математической модели замкнутой динамической системы «забой-очистной комбайн-конвейер» важным этапом является выявление закономерности формирования и матема-тическое описание силы трения в опорах очистного комбайна (ОК) на конвей-ер, которая является одной из главных причин возбуждения в системе автоко-лебаний.
Большинство исследователей [1-4 и др.] отмечают сложный характер процесса трения и нелинейную зависимость силы трения от скорости скольжения и состояния трущихся поверхностей. В технической литературе имеется достаточно много примеров определения кинетических характеристик трения для различных очистных комбайнов. В ряде случаев полученные данные противоречивы, что связано с большой сложностью проявления законов трения в условиях стохастической среды и применением различных методик.
Задачей данной работы является установление зависимости силы (коэффициента) трения в опорах комбайна на конвейер на основе данных натурного шахтного эксперимента с использованием известных методик.
Представляется целесообразным нахождение интересующей зависимости с использованием данных натурного эксперимента в представительных условиях [1,2]. Учитывая большую сложность и случайный характер процессов, происходящих в опорно-направляющих устройствах комбайна и конвейера, принимаются следующие допущения:
- коэффициент трения является функцией мгновенной скорости переме-щения комбайна только в направлении подачи;
- деформируемым элементом является только цепной тяговый орган (ЦТО), который считается упругой невесомой нитью; провисание ЦТО не учи-тывается, а масса его приводится к массе ОК по методу Релея;
- не учитываются демпфирование в опорах ОК и крутильные колебания ведущей звезды механизма подачи ОК (угловая скорость ведущей звезды по-стоянная).
Обработке подвергались данные натурного эксперимента, выполненного под руководством проф. Гуляева В.Г. сотрудниками кафедры «Горные машины» ДонНТУ на ш. «Октябрьская» ПО «Донецкуголь». Объект исследования - двухдвигательный ОК 1ГШ68. Измеряемые и осциллографируемые величины : мгновенная скорость перемещения ОК и усилие подачи (крутящий момент на валу гидромотора).
Для режима холостого хода ОК расчетная схема приведена на рис.1.
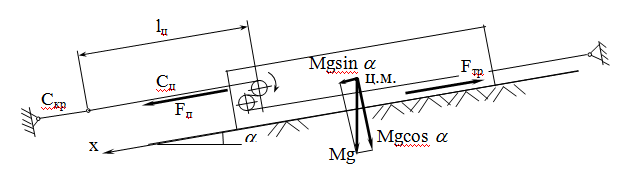
Рисунок 1 – Расчетная схема натурного эксперимента
На основании принятых допущений запишем уравнение движения комбайна в режиме холостого хода:

где М – масса комбайна с приведенной массой тяговой цепи; Fп, Fтр – усилие подачи и сила трения соответственно; С – коэффициент жесткости последовательно соединенных узла крепления це-пи и ЦТО.

Скр - коэффициент жесткости крепления цепи, который является величиной, нуждающейся в идентификации. Для нахождения его величины были обработаны осциллограммы с квазигармоническими колебаниями скорости подачи и найдены собственные частоты колебаний для коротких длин рабочей ветви ЦТО (lц.=8-12)м
Из уравнений (2) и (3) было найдено среднее значение Скр для нескольких опытов; a – угол падения пласта; V0 – линейная скорость вращения звезды (принимается равной средней скорости подачи ОК); Е – продольная жесткость ЦТО;
Для определения функциональной зависимости коэффициента трения от мгновенной скорости подачи ОК можно воспользоваться обратным построени-ем Льенара или методикой проф. Крагельского []. Исходными данными для обеих методик служат зависимости мгновенных значений усилия подачи и ско-рости движения ОК от времени, представленные в виде числовых массивов.
Нахождение кинетической характеристики трения обратным построением Льнара подробно описано в работе [5].
Метод проф. Крагельского заключается в нахождении коэффициента трения из уравнения движения (1):

Ускорение ОК находится методом гафического дифференцирования:

По данным методикам были обработаны осциллографические записи релакса-ционных колебаний, свойственных ОК с гибким тяговым органом (объем обра-ботанных данных - 12 пульсов подачи ОК для четырех средних скоростей), что позволило установить следующие особенности изучаемых процессов.
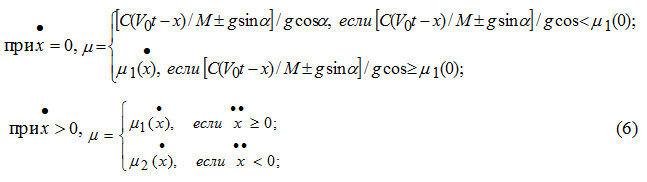
1. В каждом периоде релаксационных колебаний ОК можно выделить участки останова, ускоренного и замедленного движения. Коэффициент трения находится по зависимости:
2. Более достоверный результат можно получить, воспользовавшись ме-тодикой проф. Крагельского, так как, при использовании обратного построения Льенара, погрешности появляются при аппроксимации фазовой траектории и при оценке коэффициента жесткости крепления цепи.
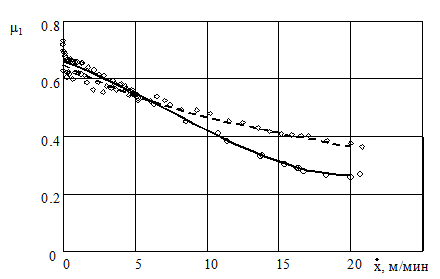
Рисунок 2 – Кинетический коэффициент трения ОК о конвейер для ускоренного движения ОК
Коэффициент, вычисленный по обеим методикам, аппроксимировался полиномами третьей степени методом наименьших квадратов. На рис. 2 приведены результаты обработки экспериментальных данных и регрессионные кривые. Сплошной линией обозначена зависимость, полученная по методике обратного построения Льенара:

Штриховой линией обозначена зависимость, полученная по методике проф. Крагельского:

3. Кинетический коэффициент трения (при отрицательных значениях ускорения) зависит от максимальной мгновенной скорости подачи. На рис. 3 приведены результаты опытных данных, обработанных по методике проф. Крагельского, и аппроксимирующая зависимость (10) в относительных единицах. За базисные величины приняты максимальная мгновенная скорость пульса подачи и соответствующее ей значение.

Совместное решение уравнений (1), (2), (6), (8), (9), (10) позволяет опре-делять параметры автоколебательного процесса перемещения в направлении подачи и усилие подачи (нагрузку на механизм подачи) на холостом ходу ОК. Некоторые результаты моделирования для ОК 1ГШ68 приведены на рис. 4,5.
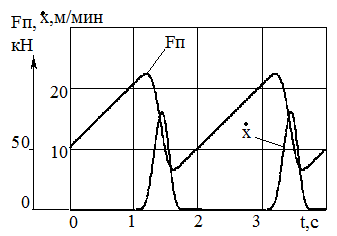
Рисунок 4 – Скорость и усилие подачи при холостом ходе ОК
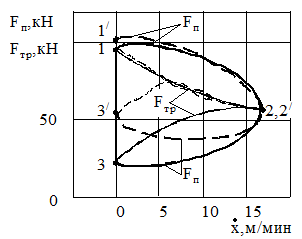
Рисунок 5 – Усилие подачи и сила трения в зависимости от скорости
На рис. 5 результаты моделирования изображены сплошными линиями, обработка экспериментальных данных – штриховыми. Сила трения обозначена более тонкими линиями. Участок 1-2 соответствует ускоренному движению ОК, 2-3 – замедленному движению, 3-1 – остановке комбайна. Кинетический коэффициент трения на участке 2-3 при моделировании определялся, учитывая непрерывность ускорения ОК. Несовпадение кривых на участке 2-3 объясняет-ся принятыми допущениями, что подтверждает анализ результатов обработки данных эксперимента.
Сравнительный анализ результатов исследований натурного объекта и модели позволяет сделать следующие выводы:
1.Впервые предложена методика определения оценок кинетической характеристики трения в режиме релаксационных автоколебаний с учетом особенностей формирования силы трения при ускоренном и замедленном движении очистного комбайна.
2.Использование полученной характеристики трения позволяет разработать математическую модель движения комбайна в режиме холостого хода, адекват-ную в главном реальному объекту.
3.При дальнейших исследованиях в математической моделе динамики рабочих процессов ОК должны учитываться зависимость продольной жесткости ЦТО от провисания рабочей ветви и взаимодействие силовых подсистем ОК, обусловленное связями в системе «забой-очистной комбайн-конвейер».