Назад в библиотеку
Математические модели асинхронных двигателей для исследования динамических свойств приводов горных машин
Автор: В.Г. Гуляев, В.Г. Потапов, Н.Н. Мотин
Источник: Наукові праці Донецького державного технічного університету. Випуск 7, серія гірнича електромеханіка. –Донецьк: ДонДТУ.- 1999. –С.124-129.
Проблема и ее связь с научными и практическими задачами
При проектировании современных горных машин актуальной научной проблемой является повышение их надежности и производительности на основе системного исследования их рабочих режимов и оптимизации динамических свойств системы «электродвигатель-рабочая машина-технологическая нагрузка». При этом объективные результаты могут быть получены только в том случае, если применяемые математические модели приводных двигателей и системы в целом адекватно отражают их динамические характеристики и взаимодействие между собой и технологической нагрузкой с учетом структурных особенностей машины.
Постановка задачи
Целью данной работы является разработка рекомендаций по применению ММАД на основе перспективного анализа результатов научных исследований в этой области, выполненных на кафедре горных машин ДонНТУ за последние 50 лет с участием авторов под руководством Я.И. Альшица и В.Г. Гуляева.
Изложение материала и результаты
Впервые на кафедре горных машин отмеченные выше методологические подходы были сформулированы Я.И. Альшицем [1]. Вместе с тем взаимодействие двигателя с нагрузкой для выемочных машин с цепными исполнительными органами рассмотрены [1] на основе статической механической характеристики АД, описываемой формулой Клосса:
Соответствующая вышеизложенным задачам ММ двухдвигательного очистного комбайна с кинематически связанными двигателями и цепным тяговым органом (типа 1ГШ68), новизна которой заключается в возможности исследования динамики установившихся и переходных процессов типовых режимов работы очистного на пластах простого и сложного строения, рассмотрена в [1].
Здесь S - скольжение ротора; w – угловая скорость ротора, w0 – синхронная скорость магнитного поля статора; Sк, Мк – соответственно критические значения скольжения и вращающие момента двигателя; e - безразмерная величина (r1 - активное сопротивление обмотки статора, r2 - приведенное активное сопротивление ротора).
Исследование технологических машин с АД показали, что при наличии в спектре внешних нагрузок периодических составляющих с частотами fн > 20Sк, ток в обмотке статора и соответствующий ему электромагнитный момент не успевают принимать значений, соответствующих мгновенной скорости ротора (электромагнитная инерция электродвигателя) [2]. Для выемочных машин при скоростях резания порядка 2 м/с частота изменения нагрузок составляет 12-25Гц, поэтому в работе [3] электромагнитный переходной процесс рекомендуется учитывать с использованием динамической характеристики Пинчуком И.С. [2].
При работе электропривода с АД в области малых скольжений линеаризованную в точке М=0; S=0 математическую модель динамической характеристики АД обычно представляют в виде
где wс – круговая частота питающей сети,y- крутизна статической характеристики двигателя; Тэ =(Sк*wс)-1 – электромагнитная постоянная АД (мера электромагнитной инерции).
Степень влияния электромагнитных переходных процессов в АД на динамические процессы в электромеханических системах зависит от безразмерной частоты внешнего воздействия vкм = КТм и отношения постоянных времени Ж = Тэ/Тм (здесь К – угловая частота внешней нагрузки, Тм = yw0I – электромеханическая постоянная времени привода, w0 – синхронная скорость двигателя; I – суммарный приведенный к валу двигателя момент инерции привода) [4].
Экспериментальные исследования реакции комбайнового АД типа ЭДКО4-2М на импульсы внешней нагрузки показали [5], что в первом приближении переходной процесс в двигателе описывается дифференциальным уравнением вида
где I – момент инерции ротора и приведенных к нему элементов привода,bд - коэффициент демпфирования двигателя Сд = 2РМк – коэффициент жесткости электромагнитной связи ротора с полем статора, Р – число пар полюсов. Таким образом, по результатам работы [5] было установлено, что для динамической характеристики комбайновых двигателей можно применять и ММ Ривина Е.Н. [6].
Взаимодействие АД с механической частью привода исполнительных органов можно оценивать с помощью предложенного Мандельштамом Л.И. коэффициента связанности ?, который существенно зависит от степени расстройки собственных частот двигателя и механической части привода [7].
Амплитудно-частотная характеристика (АЧХ) двигателя по моменту. При описании его уравнениями (2) и (3), определяется по зависимости
где К0- собственная частота АД, с-1; е - безразмерный коэффициент демпфирования АД.
По мере увеличения скольжения (S>Sн) нелинейность характеристики и погрешность расчетов АЧХ по зависимости (4) возрастают.
Режимы работы комбайновых двигателей, в частности при автоматическом поддержании средней нагрузки на уровне устойчивого момента, обусловливают работу в зоне средних значений скольжений  , что требует применения ММАД, адекватно отражающих особенности динамических свойств с учетом нелинейности статической характеристики. В работе [8] на базе модели [1] получены зависимости для расчета АЧХ АД, учитывающие нелинейность статистической характеристики, зависимость от среднего уровня нагрузки двигателя его собственной частоты и коэффициента демпфирования.
, что требует применения ММАД, адекватно отражающих особенности динамических свойств с учетом нелинейности статической характеристики. В работе [8] на базе модели [1] получены зависимости для расчета АЧХ АД, учитывающие нелинейность статистической характеристики, зависимость от среднего уровня нагрузки двигателя его собственной частоты и коэффициента демпфирования.
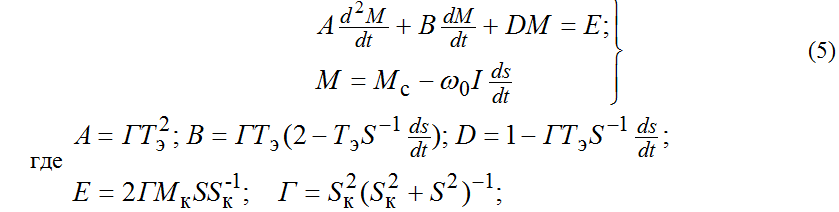
Если при работе на устойчивой части характеристики результирующий магнитный поток АД изменяется мало, то его нелинейную динамическую характеристику можно представить моделью Венцке [9]
М – электромагнитный момент двигателя;
Мс – момент сопротивлений.
В работе [10] на примере комбайнового двигателя ЭКВ4У-У5 выполнен сравнительный анализ АЧХ, полученных расчетом по [4], с учетом уровня средней нагрузки [8] и моделированием при описании АД системой уравнений (5).
В результате выполненного анализа работ [10, 11, 12, 13 и др.] можно указать целесообразную с точки зрения точности расчетов область применения рассмотренных выше ММ АД.
При анализе установившихся динамических процессов в области  целесообразно применять модели (2) и (3), которым соответствуют одинаковые АЧХ (4).
целесообразно применять модели (2) и (3), которым соответствуют одинаковые АЧХ (4).
Модель (2) (Пинчука-Вейца) позволяет определять значения момента и скольжения двигателя, а модель (3) (Ривина) учитывает только колебательные процессы в двигателе относительно средних значений момента и скольжения.
Модель (5), описывающую связь между S и М неоднородным дифференциальным уравнением второго порядка относительно М с примененными коэффициентами, являющимися функциями s и ds/dt целесообразно применять при исследовании установившихся и переходных динамических процессов, в том числе при импульсных нагрузках [13]Для исследования динамических нагрузок Мс 1,5Мн, в частности, переходных процессов в двигателях при их опрокидывании и пусках, следует применять ММ АД Парка-Гарева в виде соотношений пространственных векторов напряжений и потокосцеплений с учетом переменности параметров двигателя и влияния питающей сети. Такая ММ впервые на кафедре горных машин разработана и применялась для исследования переходных процессов пуска и опрокидывания двигателей, устойчивости работы двухдвигательного привода в области  в составе единой электромеханической системы «двигатели – трансмиссии – исполнительные органы – нагрузка» комбайна 1ГШ68 [14].
в составе единой электромеханической системы «двигатели – трансмиссии – исполнительные органы – нагрузка» комбайна 1ГШ68 [14].
В работе [14] учитывались:
-взаимосвязи между электромеханическими и электромагнитными процессами в системе привода и в сети электроснабжения с использованием результатов работы [15];
-непостоянство параметров приводных двигателей при изменении скольжения в диапазоне [16];
-структура и динамические свойства механической части привода;
-специфика формирования эксплуатационных нагрузок.
В формировании эксплуатационных спектров нагруженности выемочных и других породоразрушающих машин большое значение имеют переходные режимы при разрушении исполнительными органами угля, крепких включений (конкрементов), породных слоев забоя при реализации вращающих моментов двигателей в зоне  , а также пусковые режимы и возможные опрокидывания двигателей. Поэтому при решении комплексных задач исследования влияния динамических свойств приводов очистных и проходческих комбайнов, а также дробилок, на динамику рабочих процессов этих машин целесообразно применять математическую модель АД, разработанную на основе фундаментальных исследований Парка-Горева [17].
, а также пусковые режимы и возможные опрокидывания двигателей. Поэтому при решении комплексных задач исследования влияния динамических свойств приводов очистных и проходческих комбайнов, а также дробилок, на динамику рабочих процессов этих машин целесообразно применять математическую модель АД, разработанную на основе фундаментальных исследований Парка-Горева [17].
Особенностью комбайновых АД с глубокопазными роторами является необходимость учета изменения параметров схемы замещения двигателя от скольжения, что связанно с явлением вытеснения токов к поверхности стержней. Эта трудность может быть преодолена на основе работы [16] путем замены контура ротора с параметрами Хr(S) и Rr(S) эквивалентным двойным контуром с параметрами Хrв, Хrн и Rrв, Rrн не зависящими от S.
Для учета влияния питающей сети статорные уравнения дополнены составляющими падений напряжений, которые в координатной системе с достаточной степенью точности могут быть представлены в виде

где Rс и Хс – соответственно активное и реактивное сопротивление питающей сети.
С учетом изложенного выше система дифференциальных уравнений, описывающая динамические процессы в первом двигателе имеет вид:
?с = 314 рад/с – угловая скорость магнитного поля;
р- число пар полюсов;
?р1 = ?2 угловая скорость ротора первого двигателя;
- амплитуда напряжения в фазе.
Дифференциальные уравнения второго двигателя аналогичны (7) – (10) с учетом замены индекса 1 на 2.
С использованием разработанной ММ были исследованы динамические режимы комбайна 1ГШ68 с двигателями ЭКВ4У-У5. Решением уравнений производилось методом Рунге-Кутта с применением ПЭВМ. Некоторые результаты моделирования приведены на рис. 1.2.
Рисунок 1 – Электромагнитный момент и угловая скорость ротора первого ЭД при пуске опрокидывания АД.
Рисунок 2 – Пуск без нагрузки: а – результат моделирования; б – осциллограмма натурного эксперимента.
Полученные результаты подтверждают адекватность разработанной ММ реальному объекту.
С использованием разработанной модели создана ММ замкнутой системы «очистной комбайн – забой» со структурой группового привода рабочих органов и механизма подачи [18].
Отмеченные особенности АД учитывались при разработке математических моделей для имитационного моделирования рабочего процесса шахтных дробилок [19] и проходческих комбайнов [20], рассматриваемых как замкнутые динамические системы «электродвигатель – рабочая машина – технологическая нагрузка».
Выводы и направления дальнейших исследований
Применяемые на кафедре горных машин ДонНТУ математические модели приводных асинхронных двигателей соответствуют, решаемым задачам имитационного моделирования рабочих процессов выемочных комбайнов с групповым приводом рабочих органов и механизмов подачи с регулируемым гидроприводом, а также дробилок.
При разработке имитационных моделей функционирования замкнутых динамических систем «угольный забой – комбайн с индивидуальными электроприводами рабочих органов и тиристорным регулированием двигателей механизмов подачи (УКД300, КДК500 и др.) могут быть использованы рассмотренные ММ АД. Подлежат уточнению модели взаимодействия по нагрузке и через питающую сеть электроприводов блоков резания и частотно-регулируемых электроприводов подачи с учетом динамических характеристик тягового органа и нелинейной характеристики трения в опорно-направляющих устройствах комбайна.
Список источников
- Альшиц Я.И. Нагрузки в редукторах исполнительных органов машин для выемки угля и характеристики их двигателей// Горные машины, М.:Углетехиздат, 1959, №8, -С.58-76.
- Пинчук И.С. Переходные процессы в асинхронных двигателях при периодической нагрузке. //Электричество, 1957, №9. –С.15-18.
- Альшиц Я.И. и др. Горные машины. М.:Госгортехиздат, 1961.-492с.
- Вайц В.Л. Динамика машинных агрегатов. Л.:Машиностроение, 1969. –368с.
- Альшиц Я.И., Гуляев В.Г., Малеев Г.В. и др. Динамические характеристики комбайнового двигателя ЭДКО4-2М. //В кн. Горные машины, Киев, МВССО, 1971. –С.89-99.
- Ривин Е.И. Динамика привода станков. –М.: Машиностроение, 1966, 204с.
- Гуляев В.Г., Горбатов П.А., Лысенко Н.М. Некоторые вопросы динамики электромеханической системы двухдвигательного привода исполнительных органов угледобывающего комбайна 1ГШ68 //Из. вузов. Электромеханика, 1976, №5. –С.553-558.
- Шукайло В.Ф. Некоторые задачи статистической динамики электропривода. //Изв. вузов. Электромеханика, 1961, №5. –С.50-68.
- Wenzke W/ Zur Ableitung der dynamischen Kennlinic des Asynchronmotors in Hinblick quf dir Berechhung vor Schwingyngs-erscheinungen in Antribзanlagen/- Wiss. Zeitschrift der TH otto von Guericke, Magdeburg, 1970. H.5/6, s. 517-523/
- Гуляев В.Г., Горбатов П.А., Мотин Н.Н. Сравнение моделей динамических процессов в асинхронных двигателях горных комбайнов. //Изв. вузов. Горный журнал, 1983, №5, с.92-97.
- Гуляев В.Г. Научные основы оптимизации динамических свойств очистных комбайнов демпфирующими устройствами. дис. … докт. техн. наук, Донецк, 1985. –498с.
- Проектирование и конструирование горных машин и комплексов. /Г.В. Малеев, В.Г. Гуляев, Н.Г. Бойко и др. М.: Недра, 1988. –368с.
- Мотин Н.Н. Снижение пиковых нагрузок в системе привода исполнительных органов очистных комбайнов. Автореф. дис. … докт. техн. наук, Донецк, ДПИ, 1992. –20с
- Потапов В.Г. Режимы работы и определение рациональных параметров привода двухдвигательных очистных комбайнов. Дис. … - докт. техн. наук, -Донецк, 1982. –245с.
- Сивокобыленко В.Ф., Костенко В.И. Математическое моделирование динамических режимов двухдвигательного асинхронного электропривода. // Изв. вузов. Энергетика, 1974, №1, С.43-48.
- Сивокобыленко В.Ф., Павлюков В.А. Параметры и схемы замещения асинхронных электродвигателей с вытеснением тока в роторе. // Электрические станции, 1976, №2. –С.51-54.
- Гуляев В.Г., Сивокобыленко В.Ф.,, Жуков К.В. Математическая модель двухдвигательного привода исполнительных органов очистного комбайна. //Труды ДонГТУ. Вып.7. Серия: горно-электромеханическая. Донецк, 1999. –С.97-102.
- Гуляев В.Г., Жуков К.В. Математическая модель для имитационного моделирования функционирования системы «очистной комбайн – забой». Горный информационно-аналитический бюллетень. М.: МГГУ, 2000, №4. С.129-131.
- Кондрахин В.П., Тарасекно В.А. Математическая модель динамики одновалковой дробилки. Наукові праці Донецького державного технічного університету. Випуск 7, серія гірнича електромеханіка. –Донецьк: ДонДТУ.- 1999. –С.124-129.
- Кондрахин В.П., Хиценко А.И. Имитационное математическое моделирование процесса функционирования проходческого комбайна. Труды международной научно-технической конференции «Горная энергодинамика и автоматика. Том.1. –Донецк – 2003. –С.128-138.