Метод регистрации данных, основанный на трехмерных объектах
Автор: Lou Xiaoping, Lv Naiguang, Sun Peng, Lin Yimin.
Перевод с английского: С.Ю. Соловьёв
Источник:http://www.scientific.net/AMM.103.87
Автор: Lou Xiaoping, Lv Naiguang, Sun Peng, Lin Yimin.
Перевод с английского: С.Ю. Соловьёв
Источник:http://www.scientific.net/AMM.103.87
Техническое зрение, регистрационные данные, трехмерные объекты, оптимизация расположения
Данные метод регистрации использвует специальные трехмерные объекты,чтобы наблюдать за структурированной системой измерения света. Оптическое устройство сканирования, отслеживания объекта и стерео системв видения связаны воедино для создания профиля инспекции крупних объектов с поверхностью произвольной формы без специально отмеченных точек. Архитектура системы и этапы обработки представлены в виде модели методов оптимизации отображения трехмерных объектов. Результаты экспериментов показали обоснованность метода регистрации и предостовляют данные для повышения точности системы.
Профиль контроля является одним из ключевых факторов, которые повышают квалификацию производства крупных устройств. С развитием оптико-электронных методов обработки, все болеше оптических методов измерения 3D объектов разрабатываются и используются для точной проверки передовых промышленных продуктов с поверхностью произвольной формы. Для того, чтобы достичь цели автоматизации, в большинстве оптических 3D-систем измерения объектов применяются матрицы типов CCD (прибор с зарядовой связью) и CMOS (комплементарная логика на транзисторах металл-оксид-полупроводник), как датчики изображения, и они называются системами видение измерение.
Области измерения оптического 3D-сканирующего устройства ограничены и методы регистрации данных разработаны, чтобы преодолеть этот недостаток. Основной принцип регистрации – преобразование координат и специальные методы, используемые для отслеживания позиции сдвига измерительной системы. По данным соответствующих документов и литературы, механическое, электромагнитное, оптическое оборудование может быть использовано для выполнения позиционирования и затем данные измерений могут быть переданы в ту же систему координат автоматически [1, 2].
Метод регистрации обсуждается в этой статье, отличается от традиционных [3].Специальная трехмерный (3D) объект крепится к структурированной системе измерения света [4]. Другая стерео система видения используется для позиционирования объекта. Эта технология слежения показана на ссылке 3. Однако объект описанных выше двумерный (2D). На основе 2D-объекта, построен 3D объект с оптимизированным макетом и профиль измерения крупных объектов произвольной формы обрабатываются автоматически.
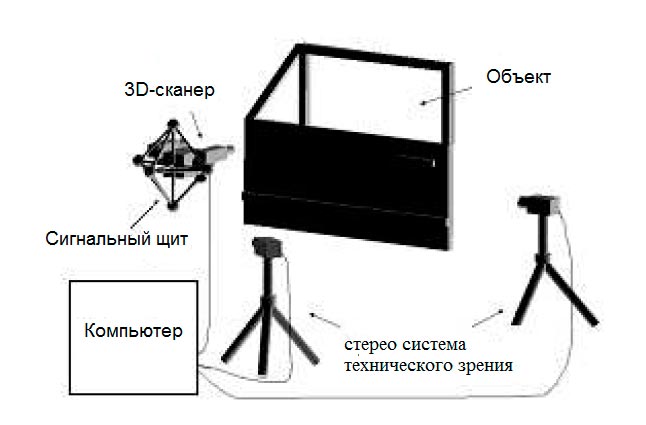
Рис.1 – Схема зрительной системы измерения в 3D
Как показано на рис.1, зрительная система измерения включает в себя объект, 3D сканер, отслеживаемую цель, стерео систему технического зрения и компьютер. Принцип этой системы заключается в следующем : во-первых, отслеживание цели с множества выбраных точек осуществляется с помощью 3D-сканера [5, 6] для формирования измерительной системы с помощью которых 3D-данные фрагментов объекта получаются точно, и преобразование из системы координат отслеживаемого объекта в систему координат 3D- сканера можно вычислить с помощью промежуточных объектов; Во-вторых, отслеживание системы координат происходит с помощью калибровки камеры, которая выступает в качестве измеретельной системы стерео видения.Расположение и отношение измерительной системы рассчитывается путем получения изображения, распознавания и поиска отмеченных точек отслеживаемого объекта с помощью системы слежения. Наконец, переход от системы измерения к системе слежения может произведен с помощью 3D-данных фрагментов объекта,которые будут объединены в отслеживающей системе координат. После этого трехмерную форму регистрации большого объекта с поверхность произвольной формы может быть выполнена эффективно , в соответствии точностью системы.
В зрительной системе отслеживания расположения предпочтительней использовать датчик для обнаружения и отслеживания измерительной системы с достаточной гибкостью и точностью. Для реализации оцифровки больших объектов лучше использовать точные платформы или взять большее колличество точек на поверхности объекта. Кроме того, 3D-данные могут быть получены от измерительной системы в любом месте и с любым отношением тех пор, пока есть достаточное количество точек,которые получены системы слежения.
В целях повышения точности местоположения и отношение движущегося объекта, используется математическое моделирование отношений между измерительными точками и точности позиционирования [7], расположение которых оптимизируется знаком точки. Как показано на рис.2, XTYTZT cистемы координат отслеживающего устройства (стерео системы измерения видимости), X1Y1Z1 и X2Y2Z2 cистема координат 3D сканера отдельно в позиции 1 и 2, XЕ1YЕ1ZЕ1 и XЕ2YЕ2ZЕ2 является системой координат системы отслеживания объекта позиции 1 и 2
Преобразование матрицы из системы слежения в 3D-сканер MT1 может быть рассчитано через промежуточные объекты. MЕT1 и MЕT2 преобразование матрицы из системы наблюдения за объектом в систему наблюдения в позиции 1 и 2. Они могут использовать зрительную стерео систему измерения и работают как контролирующее устройство. Отсюда можно сделать вывод:
| MЕ=MT1MЕT1 | (1) |
| MT1=MЕMЕT2-1=MN1MЕT1MЕT2-1 | (2) |
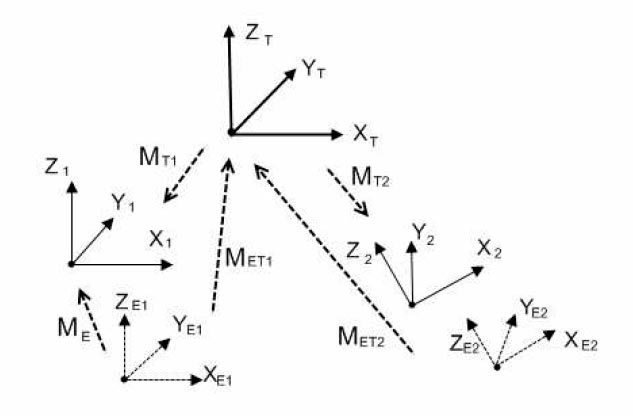
Рис.2 – Регистрация модели с использованием трехмерного объекта
Если модель двумерного объекта (имеется четыре измерительных точки, входящие в объект) как показано на рис.3, то отношения между значением R, Θ и погрешность позиционирования описаны в таблице 1 и 2. Эти данные являются результатом моделирования экспериментов.
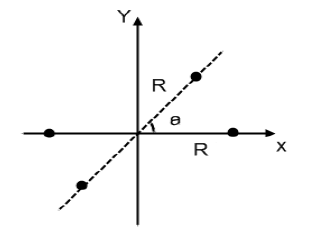
Рис.3 – Модель двумерного объекта
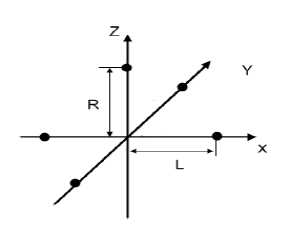
Рис.4 – Добавление еще одной точки
| R | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | 1000 |
| ε | 11.62 | 6.34 | 3.94 | 3.028 | 2.43 | 2.08 | 1.78 | 1.64 | 1.44 | 1.21 |
| σ | 6.11 | 2.99 | 1.77 | 1.52 | 1.24 | 0.86 | 0.77 | 0.71 | 0.64 | 0.62 |
| Θ(°) | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 |
| ε (мм) | 39.09 | 21.55 | 14.26 | 13.33 | 9.29 | 8.94 | 7.98 | 7.96 | 8.17 |
| σ (мм) | 30.45 | 16.76 | 8.76 | 7.66 | 5.57 | 5.08 | 4.39 | 4.10 | 3.94 |
Добавление еще одной точки в двумерном объекте показано на рис.3, из результатов эксперментов следует вывод: если эта точка из общего числа, то погрешность позиционирования может быть сведена к минимуму. Это означает, что трехмерный объект лучше, чем двумерные. Модель объекта из пяти измерительныз точек показан на рис. 4.
Согласно приведенных данных, отслеживание цели, как показано на рисунке 5 (б), который включает в себя девять многогранников, грани которого трапециидальны и имеют одну измерительную точку соответственно, как показано на рисунке 5 (а). Избежать можно не только проблем окклюзии, но и расширить диапазон измерений и эффективное отслеживание объекта, так как по крайней мере пять измительных точек могут быть обнаружены на наблюдаемом объекте с любого угла наблюдения.
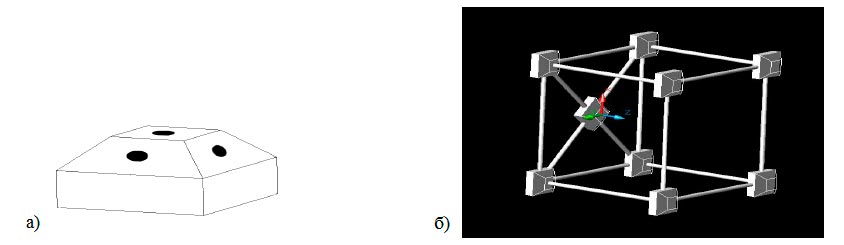
Рис.5 – Структурная схема наблюдаемого объекта
а) многогранник с измерительными точками
б) трехмерный наблюдаемый объект
Как показано на рис.6, в соответствии с принципом визуальной технологии отслеживания расположение показано на Рис.1, координаты преобразуются между системой слежения и 3D системой сканирования, эффективного отслеживание цели и данные измерений шести подобластей объединены в системы координат наблюдения. Регистрация результата с 6 точек наблюдения показана на рис. 7.

Рис.6 – Визуальные системы слежения
Экспериментальные результаты показывают, что поле измерения было расширено с помощью системы слежения за расположением и скрытые точки объекта можно получить для того, чтобы точность и целостность больших объекты произвольной формы была обеспечена.
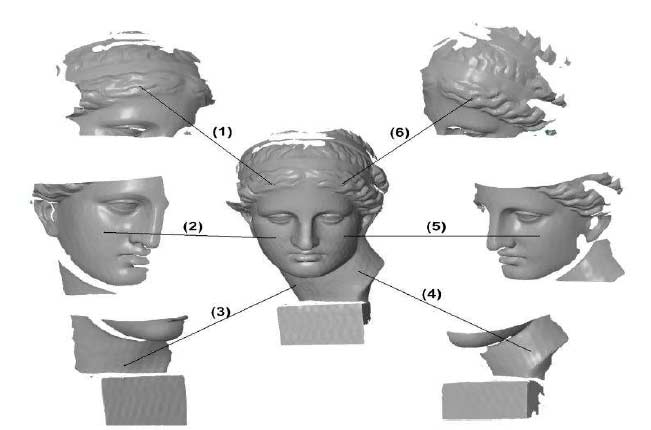
Рис.7 – Данные измерений шести подобластей и 3D регистрации
Некоторые проблемы, которые следуют из результатов исследования и личныйопыт показывают, что дальнейшие исследования можно улучшить следующим образом:
(1) В целях повышения точности измерения в широких диапазонах измерений стерео видения, точность калибровки камеры должна быть повышена.Высокая точность калибровки камеры в маленьком диапазоне могут быть получены в настоящее время. Однако, в связи с большой точностью модель калибровки не может гарантировать результат ,также большая погрешность калибровки может возникнуть при использовании небольших образцов асимметричной формы.Распределение точности измерения, калибровка стерео видения большого диапазона высокой точности на линии должны быть выполнены немедленно.
(2) Активный, а не пассивный компонент используется в основном для отслеживания объектов на границе, таких, как инфракрасный диод. Причина в том, что размер измерительных точек , снятых с помощью CCD камеры небольшой и распределение серого цвета в измерительных точках симметрично, что влияет на интенсивность света, однако этот параметр можно регулировать в соответствии с расстоянием, с которого производятся измерения. Таким образом, активный компонент обеспечивает надежную основу для высокой точности позиционирования. Хотя этот метод менее применяем в Китае в последнее время, однако в результате дальнейших исследований для проектирования активных компонентов и характерных ее изображение будет необходимо.
[1] J. Salvi, C. Matabosch, D. Fofi and J. Forest: A review of recent range image registration methods with accuracy evaluation, Image and Vision Computing, 25(2007), pp: 578-596.
[2] Z. W. Li, Y. S. Shi: Real-Time Complex Object 3D Measurement, International Conference on Computer Modeling and Simulation, 2009, pp: 191-193.
[3] HAN Jian-dong, Lu Nai-guang, et al.: 3D data registration method based on optical tracking technology, Optics and Precision Engineering, Vol.17, No.1 (2009), pp: 45-51. (in Chinese)
[4] CHEN X R , CAI P , SHI W K:. The latest development of optical noncontact 3D profile measurement, Opt. Precision Eng., 2002, 10(5), pp: 5282532. (in Chinese)
[5] Lou, X., Lv, N., Sun, P., et al.: Heterodyne multi-frequency method for 3D profile measurement, Proceedings of SPIE Vol. 7997, 799724 (2011).
[6] LONG X , ZHONG Y X , LI R J: 3D surface integration in structured light 3D scanning, Tsinghua University ( Sci & Tech), 2002 , 42(4), pp: 4772480. (in Chinese)
[7] Lin Yimin, Optical Location Tracking Technology in the Vision Measurement, Master thesis, Beijing Information Science & Technology University, China, 2011.