Объяснение частотно-регулируемых приводов.
Как использовать различные типы преобразователей частоты и тактику смягчения гармоник для борьбы с потерями тепла, которые сопровождают эти устройства
Когда Тесла в 1888 году впервые представил 3-фазный асинхронный двигатель переменного тока, он знал, что его изобретение будет более эфективным и надёжным, чем двигатель постоянного тока Эдисона. Тем не менее, управление скоростью асинхронного двигателя требует либо изменения магнитного потока, либо изменения числа полюсов двигателя. Даже спустя десятилетия, после того, как асинхронный двигатель получил широкое применение, изменение частоты для регулирования скорости оставалось чрезвычайно сложной задачей, и физическое устройство двигателя позволяло производителям создавать двигатели более чем с двумя скоростями.
В результате, двигатели постоянного тока получили применение в областях, где были необходимы точное регулирование скорости и значительные выходные мощности. В отличие от требований для регулирования скорости асинхронного двигателя, регулирование скорости двигателя постоянного тока было достигнуто внедрение реостата в обмотку возбуждения, что было возможно с имеющимися технологиями. Этот простой способ позволял регулировать скорость и мощность двигателя, и был наиболее экономичным способом регулирования на протяжении нескольких десятилетий.
К 1980-м технология асинхронного двигателя стала достаточно надёжной и недорогой для того, чтобы конкурировать с традиционными двигателями постоянного тока. Эти частотно-регулируемые приводы (ЧРП) достаточно точно контролировали скорость стандартных асинхронных или синхронных двигателей. ЧРП позволяли управлять скоростью двигателя от 0 до максимальной, и если требовалось, с повышенной от номинальной скоростью, но пониженным моментом. ЧРП манипулировали частотой напряжения на их выходе, преобразовывая переменное напряжение в постоянное, а затем, с помощью широтно-импульсной модуляции воссоздать переменный ток и напряжение. Однако, этот процесс является причиной 2–3% потерь в виде тепла в ЧРП – калорий тепла, которые должны быть рассеяны. Этот процесс также приводит к пикам перенапряжения и искажениям тока.
Виды ЧРП
Есть три общих типа ЧРП. Инверторы тока (ИТ) успешно используются в обработке сигналов и промышленных задачах. ИТ ЧРП – это единственный тип, имеющий возможности регенерации мощности. Другими словами, они могут поглощать мощность потока обратно от двигателя к блоку питания. ИТ ЧРП дают очень чистую форму тока, но требуют больших и дорогих индуктивностей в своей конструкциии вызывают рывки во время вращения двигателя на частоте менее 6 Гц
Инверторы напряжения (ИН) имеют низкий коэффициент мощности, вызывают рывки во время вращения двигателя на частоте менее 6 Гц и не регенеративны. Таким образом, ИН и ИТ не получили широкого применения.
ЧРП с широтоно-импульсной модуляцией (ШИМ) наиболее распространены в промышленности из-за своего отличного коэффициента мощности, благодаря фиксированной шине постоянного напряжения, отсутствие помех, высокая эффективность и низкая стоимость. ШИМ ЧРП использует последовательные импульсы напряжения различной длины для симуляции синусоидальной волны (рис. 1). В идеале, импульсы ограничены во времени таким образом, что их сумма даёт идеальную синусоиду. Данный метод основан на прохождении синусоиды и пилообразных импульсов через компаратор и выдачи импулься напряжения, когда значение синусоиды больше значения пилообразного ипульса. В настоящее время, для этого служат IGBT-транзисторы или управляемые выпрямители. В ближайшее время планируется начать использовать IEGT-транзисторы. Через гораздо более длительные срок, вероятно, что компонентом для решения этой задачи станут мемристоры.

Рисунок 1 – Идеальная синусоида и ШИМ-сигнал
Мемристоры – это четвёртый пассивный элемент цепи, связывающий электрический заряд и магнитный поток. Мемристоры были изобретены около 30 лет назад, но не производились, пока в апреле 2008 года их не выпустила компания Hewlett Packard. Hewlett Packard надеется использовать эти устройства в качестве пассивных транзисторов, уменьшив количество выделяемого ими тепла по сравнению с другими типами памяти. Вне зависимости от компонентов,используемых для формирования синусоиды, их переключение вызывает проблемы.
Нагрев, потери мощности и гармоники
Первой проблемой, на которую производитель должен обратить внимание – это отвод тепла. Несмотря на то, что ЧРП являются высокоэффективными устройствами, производители не в состоянии произвести идеальное сочетание компонентов. Потери тепла в приводе определяются следующим уравнением:
Hпотерь = Рt(1 - n)
Где Hпотерь – это потери пощности (W), Рt – это мощность привода (W), и n – это КПД привода. Обычно, ЧРП имеют КПД между 95% и 98%. Это означает, что количество воздуха, которое должно проходить через привод, определяется уравнением:
m = Hпотерь ÷ (CpΔT) = Pt(1 - n) ÷ (CpΔT)
Где m – это массовый расход (кг/с), Cp – теплоёмкость воздуха [кДж/(кг*К)], а ΔT – это разница между температурой входящего и выходящего воздуха (К). Это тепло может вызывать значительные затраты на внешнюю оболочку, особенно, если привод не может быть помещён в неклассифицируемую среду (среду, свободную от легковоспламеняемых газов или частиц). Если привод находится в классифицируемой среде, то поток воздуха, поступающий на привод должен быть очищен и под давлением.
Нагрев – это только одна из проблем, связанных с ЧРП. Другая серьёзная проблема состоит в структуре гармоник. График ШИМ и гармоник, которые она вызывает показаны на рис. 2. В идеальной токовой цепи, этих гармоник быть не должно. Нарушения в синусоиде называются гармониками. Они ничего не делают, кроме проблем. К счастью, существуют способы смягчения гармоник.
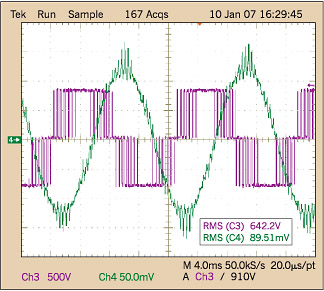
Рисунок 2 – Реальная форма синусоиды и ШИМ-сигнала
Одним из самых простых методов борьбы с гармониками является размещение фильтра синусоиды по обе стороны от ЧРП. На стороне линии, они как правило называются реакторами линии и имеют реактивное сопротивление в диапазоне между 1,5% и 5,0%. Более высокое сопротивление не только останавливает больше гармоник, но и ограничивает мощность, поступающую на ЧРП.
Другой тактикой, которая может быть применена со стороны линии ЧРП является размещение конденсаторов на общей шине. Поскольку, сопротивление конденсатора обратно пропорционально частоте сигнала, гармоники ведят более короткий путь через конденсатор и проходят через конденсатор на землю, игнорируя другие нагрузки на шине.
Преимущества ЧРП
Несмотря на то, что ЧРП генерируют большое количество гармоник и тепла, они бы не были так широко распространены и популярны, если бы не имели значительные экономические выгоды.
Электрически, ЧРП работают при высоком коэффициенте мощности. Любой класс асинхронных двигателей обычно имеет низкий коэффициент мощности на три четверти нагрузки (от 0,75 до 0,85). Это снижает срок службы двигателя, из-за ненужного увеличения токов и перегрева изоляции обмоток. ЧРП обходят эту проблему, работая на частоте ниже номинальной.
Наиболее очевидной причиной для приобретения ЧРП является контроль скорости. Это обычно делается для процессов, эксплуатации и экономической выгоды. Одной из экономических выгод является снижение затрат на обслуживание при использовании ЧРП, особенно не приходится иметь дело с щётками двигателя постоянного тока или механическими коробками передач (трансмиссиями). Наиболее очевидны экономические выгоды от ЧРП при применении в вентиляторах и насосах.
ЧРП также оптимизируют пусковые характеристики двигателя. ЧРП быстро выводят двигатели на номинальную скорость и используют только от 100% до 150% токов полной нагрузки (ТПН). Возможность старта при нормальных ТПН очень важна, если блок питание не выдерживает шестикратных ТПН или даже 350% стартовый ток устройств усройств плавного пуска. ЧРП делают это управляя магнитным потоком двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. Поддерживая постоянный поток, пусковой ток не превышает ТПН и обеспечивает максимальный крутящий момент. Это значительное улучшение по сравнению с устройствами плавного пуска, которые имели проблемы с провалами напряжения и не могли запуститься под полной нагрузкой.