Назад в библиотеку
Устройство задания и контроля
скоростных режимов шахтной многоканатной скиповой установки УЗКСР
Авторы:
Задума С.В., Гавриленко Б.В.
Источник:
«Автоматизация технологических объектов и процессов. Поиск
молодых»: Cб. научных трудов. XII научно-технической
конференции
аспирантов и студентов в г. Донецке 17–20 апреля 2012 г.
–
Донецк, ДонНТУ, 2012. – 491 с.
Аннотация
Задума
С.В., Гавриленко Б.В.
Устройство задания и контроля скоростных режимов шахтной многоканатной
скиповой установки УЗКСР
Обоснована
необходимость создания устройства управлени скоростніми режимами
шахтного подъема. Рассмотрена структурная схема устройства, описана
основная элементная база.
Шахтный скиповой подъем
является важным и энергоемким процессом транспортировки угля. В статье
[1]
обосновывалась необходимость создания системы адаптивного
управления производительностью подъемной установки. Соответственно,
важным этапом создания системы управления объекта является выбор
технических средств, реализующих решение данной задачи.
Аппарат осуществляет управление
движением и контроль его параметров с заданием различных в зависимости
от режима величин скорости и ускорения тахограмм. Разработанная
аппаратура в системе автоматизации скипового подъема имеет связь с
апаратами загрузки и разгрузки [2]
и ЭВМ диспетчера шахты. Устройство предназначено для асинхронного
привода с тиристорным каскадом (АТК) ввиду простоты алгоритма
регулирования скорости и широкого диапазона регулирования параметров
процесса движения подъемного сосуда, а также однозначности соответствия
управляющего сигнала и выходного параметра при различных нагрузках,
высокой экономичности и современной элементной базы.
Составленная структурная схема
устройства контроля скоростных режимов УЗКСР (рисунок 1) удовлетворяет
решению поставленной задачи по автоматизации процесса подъема.
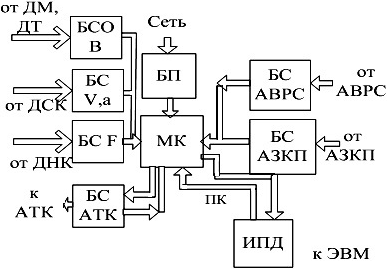
Рисунок 1 –
Структурная схема
устройства задания и контроля скоростных режимов УЗКСР
Для структурной схемы
устройства задания и контроля скоростного режима приняты следующие
условные обозначения:
БП – Блок питания схемы апарата БСО В –Блок
согласования параметров тормозного устройств, тиристорного блока АТК и
др. ДМ – датчик давления масла, ДТ – датчики
состояния тормозной системы БС V, a – Блок согласования с
датчиками скорости(ускорения)
БС F – Блок согласования с датчиками натяжения каната
ИПД – интерфейс передачи данных БС АВРС – Блок
согласования c автоматическим устройством разгрузки скипа
модернизированным
БС АЗКП – Блок согласования c автоматическим
устройством
загрузки скипа
Было принято техническое
решение о создании аппарата на базе новейших микроконтроллеров серии
Atmel Xmega, а именно Atmel Xmega 64. Он составляет основу устройства и
обозначен на схеме как МК. Для связи с внешними датчиками предусмотрены
блоки согласования входных параметров БС. Управление регулятором
тиристорного блока асинхронно-тиристорного каскада осуществляется
устройством развязки БС АТК. Для связи с ЭВМ диспетчера предусмотрен
интерфейс передачи данных типа RS-485 ИПД.
Питание схемы осуществляется
стандартным блоком питания БП. Напряжение питания аппарата составляет 5
В. Сигналы от датчиков давлении масла и тормозного усилия ДМ и ДТ
соответственно поступают через блок согласования второстепенных
параметров БСО В поступают на микроконтроллер МК, где обрабатываются и
передаются на ЭВМ. Данные параметры непосредственно не связаны с
управляемым процессом, но контролируется их численное значение.
Параметры скорости и ускорения контролируются посредством передачи
сигнала от датчика скорости ДСК к блоку согласования БС V, a, а также
предусмотрен контроль за натяжением подъемного каната многоканатной
скиповой установки посредством датчика натяжения каната ДНК с блоком
согласования силы натяжения БС F. Связь с ЭВМ диспетчера шахты
осуществляется посредством интерфейса передачи данных ИПД RS-485.
Также
предусмотрена синхронизация работы аппарата с автоматическим
устройством разгрузки скипа АВРС посредством блока согласования БС
АВРС, а также c автоматическим устройством загрузки скипа АЗКП через
блок согласования БС АЗКП.
Управление
асинхронно-тирисорным каскадом (АТК) осуществляет блок связи БС АТК с
соответствующим ящиком контактов К АТК.
Таким образом, разработанное устройство задания и контроля скоростных
режимов УЗКСР позволит осуществлять задание и изменение параметров
тахограммы скоростей движения подъемного сосуда с высокими показателями
точности и, вместе с тем, с быстродействием, значение которого
удовлетворяет поставленным задачам.
Список использованной
литературы
1. Задума С.В. Анализ способов управления производительностью скиповой
подъемной установки / С.В. Задума, Б.В.
Гавриленко // «Донбасc–2020:
перспективи
розвитку очима молодих
вчених»: Cб. наукових праць. VI науково-технічної
конференції, м. Донецк, 24–26 квітня 2012 г. –
Донецьк, ДонНТУ Міністерства освіти
і науки, молоді та спорту України, 2012. – 1128 с.
2. Задума
С.В. Аппаратура учета производительности шахтной подъемной
установки / С.В. Задума, Б.В. Гавриленко // «Автоматизация
технологических объектов и процессов. Поиск молодых»: Cб.
научных трудов. XI научно-технической конференции аспирантов и
студентов в г.
Донецке 17–20 мая 2011
г. – Донецк, ДонНТУ, 2011.
–
306 с.