
Реферат за темою випускної роботи
Зміст
- Вступ
- Загальна постановка проблеми
- Передбачувана наукова новизна та планована практична цінність
- Огляд досліджень і розробок по темі
- Пошук несправностей і системи діагностики
- Зондовая діагностика та метод
веденого зонда
- Граф пошуку несправностей за
методологією
веденого зонда
- Плановані результати
- Висновки
- Перелік посилань
Вступ
Важливою складовою експлуатації обчислювальної техніки завжди було технічне обслуговування, зокрема діагностування, пошук та усунення несправностей. На даний час в сучасних цифрових пристроях все частіше застосовується контролепридатне проектування, яке дозволяє автоматизувати тестування і пошук несправностей. Однак на території країн СНД, у тому числі України, залишилася велика кількість застарілої обчислювальної техніки, яку модернізувати чи замінити на нову занадто дорого. Виникає необхідність у її діагностуванні та ремонті. Завдання діагностики для такої техніки вирішуються "класичними" способами, тому потрібні спеціалізовані системи діагностики. Для такого масштабного застосування діагностування необхідний оптимальний алгоритм пошуку несправностей, однак аналіз вітчизняних і зарубіжних літературних джерел вказує на їх відсутність. Це пояснюється трудомісткістю та складністю розробки таких алгоритмів.
Загальна постановка проблеми
Для широкого застосування діагностики необхідний оптимальний алгоритм пошуку несправностей (АПН), але їх немає. Це пояснюється трудомісткістю та складністю розробки таких алгоритмів. В галузі систем зондової діагностики (ЗД) залишається невирішеним ряд проблем, серед яких в першу чергу слід виділити проблеми мінімізації перестановок зонда (тобто тривалості процесу діагностики), локалізації несправності з точністю до знімною компоненти та проблему мінімізації зовнішньої пам'яті системи ЗД. Актуальним є пошук рішень цих проблем з метою отримання досить універсального алгоритму пошуку несправностей. Фахівці в області діагностики вже довгий час ведуть дослідження в цьому напрямку. Особлива увага приділяється зондовому пошуку несправностей як процесу і безпосередньо алгоритму "веденого зонда". Також робиться акцент на оптимізаційних задачах, розв'язуваних в галузі зондової діагностики за різними критеріями, в основному по зменшенню числа перестановок зонда. Для вирішення цього завдання існують різні підходи. Мета роботи - розробка алгоритму зондового пошуку несправностей для цифрових схем, з урахуванням технологічних особливостей "реальних" схем, та його оптимізація по середньому числу перестановок зонда.
Передбачувана наукова новизна та планована практична цінність
Проблема пошуку універсального алгоритму пошуку несправностей і мінімізації кількості перестановок зонда не є новою, проте очевидна відсутність оптимальних рішень у цій галузі. У роботі передбачається розробка поліпшеного АПН за методологією "веденого зонда", зокрема, з можливістю виділення з об'єкта діагностики (ОД) блоків з локальними зворотними (замкнутими) контурами. Це, в свою чергу, дозволить сприймати групу елементів з локальними зворотними зв'язки як один елемент, який можна назвати псевдоелементом.
Якщо розроблений алгоритм буде досить вдалим, то його використання в ЗД матиме значну вигоду в часі тестування "реальних" обчислювальних пристроїв, інтегральних схем та іншої техніки.
Огляд досліджень і розробок по темі
Розробкою цього напряму в ДонНТУ займається доцент кафедри комп'ютерної інженерії, кандидат технічних наук Зінченко Юрій Євгенович. В даний момент робота ведеться за наступними напрямками:
- детерміноване і псевдовипадкове тестування обчислювальних пристроїв (ОП);
веденого зонда
[6].
З результатами його розробок та наукової діяльності можна ознайомитися тут.
Під керівництвом Зінченко Ю. Є.
також було написано кілька магістерських робіт, кожна з яких містить
великий огляд по темі і пропонує рішення поставлених проблем. З
рефератами на ці роботи можна ознайомитися в розділі Посилання
за темої випускної роботи
Пошук несправностей і системи діагностики
Технічне діагностування обчислювальних пристроїв вирішує такі основні завдання:
- перевірка справності - виявлення факту несправності ОП на рівні придатний / непридатний;
- пошук несправності.
Залежно від ступеня автоматизації вирішення завдання, системи другого типу діагностування ОП поділяються на два основні класи:
- системи з автоматичним пошуком несправностей;
- системи з зондовим пошуком несправностей [1].
Автоматичні системи здійснюють пошук несправностей за допомогою ідентифікації несправного стану об'єкта діагностики (ОД) через його зовнішні (крайові) виходи і порівняння цього стану з побудованим заздалегідь так званим діагностичним словником несправностей. Діагностичний словник кожному несправному стану ОД ставить у відповідність тестову реакцію, яка виходить шляхом моделювання цього стану на заданому тесті ОД [8].
Виключаючи втручання людини, автоматичні системи покликані повністю автоматизувати процес пошуку несправностей. Однак ця ідеальна мета виявилася в принципі нездійсненною. Принципова неможливість автоматичного пошуку несправності ОП пояснюється тим, що, як показали дослідження, визначення джерела несправності цифрового пристрою з точністю до окремої змінною компоненти є завданням нерозв'язною складності [2]. Звідси випливає низька діагнозоспроміжність (роздільна здатність) автоматичних систем, адже кожній можливій тестовій реакції діагностичний словник ставить у відповідність, як правило, не одну, а цілий список несправностей ОП.
Практично нездійсненною виявилася також і сама ідея використання словника несправностей, бо, по-перше, модель константних несправностей, щодо якої визначається словник, була зручною для вентильних схем, але є неадекватною для сучасних складних ОП. По-друге, довжина тесту сучасного ОП досягає мільйона векторів та більше, що ставить під сумнів можливість моделювання несправностей на такому тесті. Тому автоматичні системи діагностики знаходять застосування для комбінаційних і найпростіших послідовних ОП [7, 9,10].
Зондова діагностика та метод "веденого зонда"
Неспроможність автоматичних систем привела до необхідності побудови автоматизованих, тобто допускаючих втручання в діагностичний процес людини, систем пошуку несправностей. Втручання людини, передбачене в таких системах, зводиться до активного або пасивного впливу (зондування) на внутрішні контрольні точки ОД, тому системи називаються зондовим, а процес пошуку несправності з використанням такої системи - зондовим пошуком або зондової діагностикою (ЗД).
Зондова діагностика ОП базується на двох основних підходах:
- поелементне зондування (не буде розглядатися);
- метод "веденого зонда".
Пошук несправностей за методом "веденого зонда" заснований на "спостереженні" за шляхом прояви несправності за топологічної схемою ОД. Простежування проводиться зондуванням внутрішніх контрольних точок шляху від контакту вихідного роз'єму, на якому несправність проявилася, до вузла, де знаходиться її джерело, і в порівнянні реальної тестової реакції з еталонними значеннями. Еталонна тестова реакція обчислюється шляхом моделювання об'єкта в справному стані, або знімається заздалегідь зі справного (еталонного) зразка ОД. Для зондування застосовуються одноконтактний (щуп) або груповий (зажим, кліпси) зонд.
Аналіз тестових реакцій в системах, що реалізують метод "веденого зонда", може бути логічним або компактним. У першому випадку порівняння тестових реакцій перевіряємого і еталонного ОД проводиться в кожному такті роботи пристрою, в другому випадку порівнюються стислі характеристики (сигнатури) реакцій. Стискання здійснюється методами рахунку одиниць (нулів), перепадів, поділу на характеристичний поліном (сигнатурний аналіз) і так далі.
Алгоритм веденого зонда простежує шлях, по якому проявляється несправність в схемі. Шлях починається на виході схеми, на якому була вперше зафіксована несправність [4]. Спочатку по порядку перевіряються входи компонента, який безпосередньо підключений до виходу схеми. Якщо на якомусь вході спостерігається несправність, то робиться перехід на компонент, вихід якого безпосередньо підключений до даного входу, і перевіряються його входи. Таким чином, виконується просування по схемі, поки не буде знайдений компонент, у якого на входах не проявляється несправність. Лінії зв'язку можуть бути теж несправними, і необхідно прозондувати також вихід компонента, з якого надійшли сигнали [4]. Якщо на виході реакція правильна, то несправною є лінія зв'язку, інакше – сам компонент.
Отже, описаний класичний алгоритм "веденого зонда". Перевагою алгоритму є його простота і швидкодія. Його основним недоліком є велика кількість перестановок зонда, яка необхідна для реалізації алгоритму, бо вибір контрольних точок для чергового зондування виконується без оптимізації. Це веде до занадто великих витрат часу на тестування. Іншим недоліком алгоритму є відсутність опрацювання для "реальних" ОП, які характеризуються наявністю різних типів ланцюгів - двонаправлених, високоімпендансних, нелогічних, пасивних, а також з іншими технологічними особливостями.
Звідси випливає потреба, по-перше, в адаптації класичного алгоритму до реальних ОП, і, по-друге, в мінімізації перестановок зонда.
Мінімізація перестановок зонда стала вже традиційним завданням у зв'язку з прямою залежністю від неї часу діагностування ОП. Фахівцями в галузі діагностики неодноразово робилися спроби її вирішення. Детальний аналіз запропонованих рішень цієї задачі дозволяє виявити такі їх недоліки:
- не запропоновані способи мінімізації для ОП з глобальними зворотними зв'язками, тобто для сильнопослідовних ОП;
- необхідна адаптація алгоритмів до "реальних" ОП;
- реалізація запропонованих алгоритмів призводить до великих втрат часу через їх високу складність [3].
Виявлені недоліки спроб мінімізації перестановок зонда зумовлені не тільки тим, що не знайдений "найкращий" алгоритм. Навряд слід очікувати, що буде знайдений алгоритм для реальних ОП, що володіє мінімальним числом перестановок зонда і одночасно є настільки простим, що його реалізація стане можливою в режимі "реального часу", а також буде можливе масове застосування на ОД різних конструкцій. Не залишаючи спроби пошуку оптимального алгоритму пошуку несправностей, цей підхід все ж доцільніше розробляти таким чином, щоб трудомістке завдання побудови цього алгоритму вирішувалося як синтез гіпотез всіляких несправних станів об'єкта ЗД та алгоритмів їх ідентифікації до початку етапу власне діагностики ОП. Такий підхід дозволив би пустити по паралельних напрямках дві трудомісткі завдання - алгоритм пошуку і власне пошук несправності, що в свою чергу спростить побудову програмного забезпечення для системи зондової діагностики, зробить можливим зондування в режимі "реального часу", підвищить гнучкість і адаптованість системи до різних стратегій пошуку несправностей. Реалізація описаної ідеї можлива на базі графа пошуку несправностей, попередньо побудованого для ОД [3].
Граф пошуку несправностей за методологією "веденого зонда"
Метод пошуку несправності (МПН), який реалізує алгоритм пошуку несправності (АПН), використовує граф пошуку несправностей (ГПН), що визначає послідовність зондування ключових точок (КТ), залежно від стану схеми [4]. Граф пошуку несправності будується за описом схеми.
Схема, що діагностується, складається з чотирьох компонент (рис. 1). В алгоритмі "веденого зонда" використовується опис тільки структури схеми, а функціональність, реалізована кожним компонентом, значення не має. Компоненти схеми та їх виходи пронумеровані. Вхідні і вихідні псевдокомпоненти позначаються великими літерами.
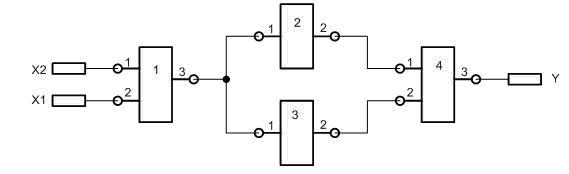
Рисунок 1 – Схема, що діагностується
Як видно на рисунку 2, ГПН відображає порядок зондування ключових точок схеми. Якщо на псевдокомпоненті Y була зафіксована несправність, то спочатку перевіряються входи компонента 4, який безпосередньо підключений до Y. Якщо значення на двох входах правильні (переходи по Y-дугам), то перевіряється вихід компоненти (вихід 4.3). Якщо на ньому також вірне значення, то робиться висновок про несправність лінії зв'язку, яка підключена до Y (перехід по Y-дузі в кінцеву вершину). Якщо на вході компонента зафіксовано розбіжність з еталонною реакцією, то робиться перехід по N-дузі на контрольну вершину і повторюється процес тестування для компонента, який підключений до даної контрольної точки. Якщо на виході зафіксовано розбіжність значеннь, то робиться перехід на контрольну вершину з відповідною позначкою, з якої по N-дузі виконується перехід в кінцеву вершину з повідомленням про несправність компонента. До ключових точок 1.1 і 1.2 підключені тільки вхідні псевдокомпоненти. Мається на увазі, що з них несправність прийти не може. Тому, якщо в цих КТ спостерігається несправність, то несправними вважаються лінії зв'язку, які з'єднують КТ з вхідними псевдокомпонентамі [5].
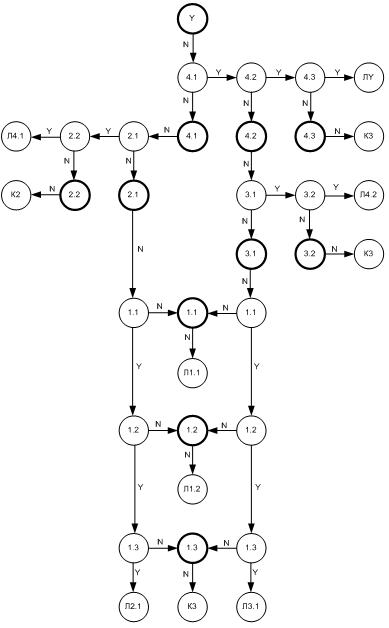
Рисунок 2 – ГПН для схеми, що діагностується
В ГПН до кожної контрольної вершині (як і до початкової) через N-дугу підключений ланцюжок з проміжних вершин і однієї кінцевої вершини, які з'єднані між собою Y-дугами. Такий ланцюжок вершин називається Y-ланцюжком. Таким чином, ГПН можна легко записати в текстовому вигляді. Кожній контрольній вершині відводитися один рядок, на початку якого записується мітка даної вершини, а після неї перераховуються мітки усіх вершин з Y-ланцюжка. Таке текстове представлення ГПН є однозначним, і по ньому можна досить легко відновити граф в пам'яті [1,2].
На рис. 3 приведено текстове представлення ГПН для схеми, що діагностується. Мітка контрольної вершини від Y-ланцюжка відділяється двокрапкою.
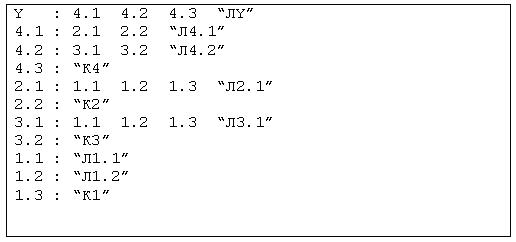
Рисунок 3 – Текстове представлення ГПН схеми, що діагностується
У більшості схем є компоненти з декількома виходами. Такі компоненти можна розглядати як кілька компонентів, по числу виходів, які мають однакову кількість входів і один вихід.
Подібний варіант подання ОД є найбільш прийнятним для подальших досліджень в області мінімізації числа перестановок зонда, адаптації АПН під конкретні конструкції ОП, а також оптимізації АПН і МПН в цілому [5].
Плановані результати
У роботі передбачається розробка поліпшеного АПН за методологією "веденого зонда", зокрема, з можливістю виділення з об'єкта діагностики блоків з локальними зворотними (замкнутими) контурами. Це, в свою чергу, дозволить сприймати групу елементів з локальними зворотними зв'язками як псевдоелемент. Таким чином, ОД буде комбінаційної, а не складно- або слабопослідовною схемою.
Для пошуку несправності в отриманій комбінаційній схемі можна застосувати алгоритм GALOP, який вимагає меншу кількість перестановок зонда, ніж SCAN, що застосовується у схемах зі зворотними зв'язками. Якщо несправність була виявлена в псевдоелементі, то очевидно, що вона в групі елементів зі зворотними зв'язками. Для цієї групи буде застосовуватися вже алгоритм SCAN.
Для наочності розглянемо приклад на рис. 4. Змінимо комбінаційну схему, що діагностуються і наведена на рис. 1, так, щоб в ній замість елемента 2 розташовувався RS-тригер. Тригер буде групою елементів, які мають локальні зворотні зв'язки. Схема стала слабопослідовною. Тепер для сканування і діагностування видозміненої схеми по методу "веденого зонда" потрібно використовувати алгоритм SCAN.
Рисунок 4 – Вставка псевдоелемента (анімація: 4 кадра, 5 циклів повторення, 105 Кб)
Для запобігання подібних складнощів зробимо заміну локальної групи елементів зі зворотними зв'язками на псевдоелемент, що має аналогічні входи і виходи. Отримаємо схему об'єкта діагностики, яка не має зворотних зв'язків, є комбінаційної і може бути оброблена більш швидким алгоритмом GALOP.
Висновки
Робота в позначеному напрямку пов'язана з розробкою і тестуванням АПН по методу "веденого зонда", з особливою увагою до пошуку і заміні груп елементів з локальними зворотними зв'язками на еквівалентні псевдоелементи. Якщо розроблений алгоритм буде досить вдалим, то його використання в ЗД принесе значну вигоду в часі тестування "реальних" обчислювальних пристроїв, інтегральних схем та іншої техніки, що потребує діагностики.
При написанні даного реферату магістерська робота була ще не завершеною. Остаточне завершення: грудень 2012 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Малышко, Ю. В., Чипулис, В. П., Шаршунов, С. Г. Автоматизация диагностирования электронных устройств [Текст] / Ю. В. Малышко, В. П. Чипулис, С. Г. Шаршунов. // Москва : Энергоатомиздат, 1986. – 216 с.
- Горяшко, А. П. Синтез диагностируемых схем вычислительных устройств [Текст] / А. П. Горяшко // Москва : Наука, 1987. – 288 с.
- Зинченко, Ю. Е., Козинец, А. М., Жилин, К. Н. Проблемы зондового поиска неисправностей и пути их разрешения [Текст] / Ю. Е. Зинченко, А. М. Козинец, К. Н. Жилин // Сборник трудов Донецкого государственного технического университета. Серия: Информатика, кибернетика и вычислительная техника, выпуск 6. – Донецк : ДонГТУ, 1999. – С. 212-217.
- Воротынцев, Н.В., Зинченко, Ю.Е. Поиск неисправностей цифровых ТЭЗ по алгоритму ведомого зонда со «статической оптимизацией» [Текст] / Воротынцев Н.В., Зинченко Ю.Е. // Сборник трудов первой международной студенческой научно-технической конференции – 15 декабря 2005 г. – Донецк : ДонНТУ, 2005. – С. 321-322.
- Деменко, А.Г., Ханаев, В.В., Зинченко, Ю. Е., Зинченко, Т. А. Проблемы минимизации количества перестановок зонда в процессе поиска неисправностей по методологии «ведомого зонда» [Текст] / Деменко А.Г., Ханаев В.В., Зинченко Ю. Е., Зинченко Т. А. // Сборник трудов III научно-технической конференции студентов, аспирантов и молодых ученых – 16-18 апреля 2012 г. – Донецк : ДонНТУ, 2012.
- Зинченко Ю. Е. – Научные интересы и разработки [Электронный ресурс]. – Режим доступа: http://hardclub.donntu.ru/zinchenko/science.htm
- Молов В.К., Тарасенко В.П. Структурно-аналитический метод поиска неисправностей [Текст] / Молов В.К., Тарасенко В.П. // Автоматика и вычислительная техника. – 1984., с. 72-78.
- Зинченко Ю.Е., Хатейт Ю. Стратегия поиска неисправностей системы зондовой диагностики [Текст] / Зинченко Ю.Е., Хатейт Ю. // Теоретическая и прикладная информатика. Науч.-техн. конф.. Тезисы докладов. – Донецк, 1993. – С. 59.
- Тестово-Диагностический
Комплекс – Автоматизированная система диагностики
ТЕСТ-Д
для ремонта электронных промышленных устройств [Электронный ресурс]. – Режим доступа: http://mages.chat.ru/tdk3e.htm - Бухтеев А. – Методы и средства проектирования систем на кристалле [Электронный ресурс]. – Режим доступа: http://www.chipinfo.ru/literature/chipnews/200304/1.html