
Рисунок 1 - Схема связей и взаимодействий
Введение
В Windows предусмотрены методы подключения дополнительных обработчиков прерываний к драйверам устройств, чем обеспечивается возможность полноценного ручного обслуживания внешнего устройства, а также дополнительные возможности во взаимодействии с остальными устройствами.
Основные понятия
Процедуры обработки прерывания носят название ISR (Interrupt Service Routine). В Windows все задачи имеют приоритеты, в их цепочке пользовательские приложения занимают низшее место, за ними следуют программы режима ядра (драйверы и т.д.), и самые приоритетные – прерывания. Вследствие этого сами обработчики прерываний не позволяют выполняться всем остальным, что может приводить к так называемой «деградации системы», для этого были введены процедуры отложенного вызова DPC (Deferred Procedure Call), которые относятся к уровню программ ядра. Вследствие этого если обработка прерывания может занимать значительное время, то она переносится в специальную DPC процедуру, а обработчик прерывания лишь оставляет запрос на ее вызов. DPC процедуры привязываются к объектам устройств, и запросы на их вызовы заносятся именно через идентификаторы устройств. Для прерываний введены специальные объекты, через которые производится их отвязка от ISR, отвязку нужно производить вручную. Если, например, привязать к прерыванию ISR и, не отвязывая выгрузить драйвер – по следующему соответствующему прерыванию будет выполнено обращение к недействительной области памяти, и, скорей всего, перезапуск системы.
Объект прерывания
Объекты прерывания описываются структурами KINTERRUPT , которые создаются функцией
подключения прерывания к обработчику – IoConnectInterrupt, в функцию нужно передать аппаратный
вектор прерывания и уровень прерывания. Рассмотрим на примере. Мы находимся в процедуре
DriverEntry, зарегистрировали устройство, подключаем обработчик прерывания:
KAFFINITY Affinity; // структура, отвечающая за привязку к логическому процессору
ULONG MappedVector; // аппаратный вектор прерывания
PKINTERRUPT pInterruptObject; // указатель на объект прерывания
ULONG InterruptLevel = 7; // IRQ7
KIRQL irql = InterruptLevel; // аппаратный уровень используемых прерываний
MappedVector = HalGetInterruptVector(Isa, // тип системной шины - ISA
0, // номер шины
InterruptLevel, // шинный уровень прерывания
InterruptLevel, // шинный вектор прерывания (для Isa – одинаковые)
&irql, // уровень прерывания – выходной параметр
&Affinity); // привязка к процессору – выходной параметр.
// аппаратный вектор прерывания получен, регистрируем обработчик
NTSTATUS status; // статус выполнения привязки
status = IoConnectInterrupt(&pInterruptObject, // получим объект прерывания
IsrRoutine, // наш обработчик прерывания
pDeviceObject, // дополнительный параметр, передаваемый при вызове ISR
NULL, // спин-блокировка - не используем
MappedVector, // аппаратный вектор
irql, // уровень прерывания
irql,
Latched, // тип прерывания – по фронту
FALSE, // не общедоступный вектор
Affinity, // привязка к процессору
FALSE); // не сохраняем FPU, MMX регистры при вызове
if(status != STATUS_SUCCESS)
{ // ошибка
}
else
// успех, теперь прерывание подключено к обработчику.
Здесь мы подключили прерывание на IRQ7 шины ISA(0), что, в основном, соответствует портам LPT1, LPT2.
По завершению работы нужно отключить прерывание:
IoDisconnectInterrupt( pInterruptObject ); // функция ничего не возвращает
Функция обработчика прерывания (ISR) должна иметь вид:
BOOLEAN IsrRoutine(IN PKINTERRUPT pInterrupt,IN PVOID pContext);
Она принимает указатель на объект самого прерывания (чем дает возможность сделать отвязку в
самой обработке), и «контекст устройства» – указатель без типа, это тот самый «дополнительный
параметр, передаваемый при вызове» который был указан в IoConnectInterrupt, в данном
случае это будет pDeviceObject.
Процедура отложенной обработки (DPC)
DPC, как было сказано, привязывается к объекту устройства:
IoInitializeDpcRequest(pDeviceObject, // указатель на объект устройства
DpcRoutine); // процедура отложенного вызова
Функция ничего не возвращает. Сама DPC должна иметь вид:
VOID DpcRoutine(IN PKDPC Dpc,IN PDEVICE_OBJECT pDeviceObject,IN PIRP pIrp,IN PVOID pContext);
Она получает структуру, содержащую информацию об отложенном вызове, ее объект устройства, указатель
на пакет ввода/вывода (IRP), дополнительный параметр на усмотрение программиста.
Теперь зарегистрировать вызов можно следующим вызовом:
IoRequestDpc(pDeviceObject, // указатель на объект устройства
NULL, // указатель на IRP пакет – не используем
NULL); // наш дополнительный параметр – не используем
После этого DPC поставлена в очередь на выполнение. Как видно – единственный обязательный
параметр это ссылка на объект устройства, собственно без него и неизвестно что вызывать.
Храня нужные данные в расширении устройства можно практически не использовать остальные параметры.
Эксперименты
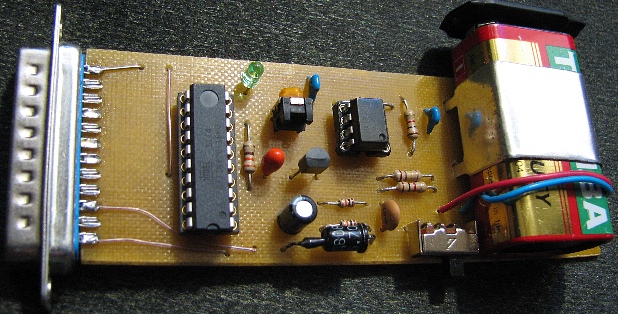
Было создано устройство, генерирующее случайные числа по запросам от компьютера. Оно подключается через порт LPT1 и использует прерывание, приведенное в примере выше, для эффективности работы системы, т.к. LPT порт работает на частоте до 100 кгц, а устройство – до 15 кгц, драйвер оставляет запрос на новое число и отдает управление системе, не ожидая впустую готовности устройства. По готовности устройство выставляет данные и генерирует прерывание, которое обрабатывается по описанной выше схеме. Схема связей и взаимодействий приведена на рис. 1.
Циклический буфер используется для удобного одновременного чтения и записи в него, на случай, если в момент чтения программой придет прерывание. Таким образом, у буфера есть не только длина, а и его начало (хвост) – чтение происходит с хвоста, а запись с головы, которая после последнего смещения в буфере переходит в его начало (нулевое смещение) – аналогично тому, как сделан буфер клавиатуры в DOS.
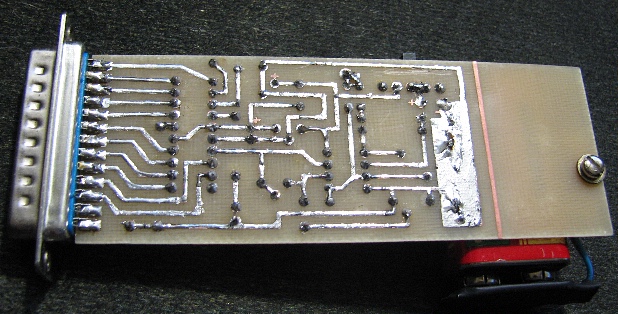
Изначально у регистра данных LPT-порта предусматривалась запись со стороны компьютера и соответственно чтение со стороны внешнего устройства, поэтому здесь необходимо использовать двунаправленный режим передачи данных – устанавливается режим работы EPP в bios. Фото устройства приведены на рис. 2,3.
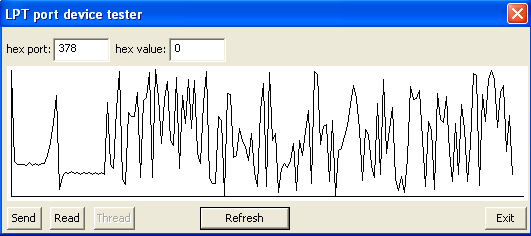
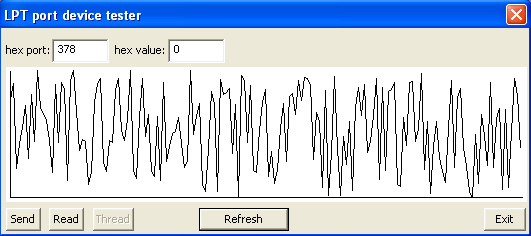
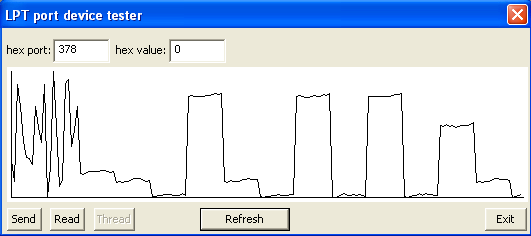
Тестирующая программа выводит полученные случайные числа в виде графика, соединяя линиями точки, соответствующие значениям полученных чисел и отображенные с интервалом в три пикселя. При старте работы устройства всегда наблюдается некоторая инициализация (маленький разброс значений) продолжительностью около 10-15 чисел, что соответствует примерно одной миллисекунде после первого запроса к устройству. После отключения питания контроллер продолжает работать, получая +5в от LPT-порта, но остальная часть схемы уже не может работать корректно, АЦП выдает на выходе последовательность данных, похожих на прямоугольные импульсы. Судя из этого в некоторых случаях можно не подключать дополнительного питания к маломощным устройствам, в зависимости от схем. Промежуточные чтения из порта данных показали, что между запросами значение в нем не меняется, как и должно быть – буфер быстро пополняется, устройство ждет запросов от драйвера, драйвер ждет запросов от пользовательской программы.
Выводы
В данной статье были рассмотрены принципы обработки прерываний в среде драйверов Windows NT, был разработан, реализован, протестирован и описан работающий пример внешнего устройства, подключаемого через LPT-порт. Эксперименты показали, что Windows позволяет обслуживать внешние устройства с довольно высокой частотой, при этом, не перегружая себя, вследствие чего такой подход может быть использован для полноценного управления внешними объектами со своевременным реагированием на их запросы.
Литература