
Рис. 1 Вращающаяся рамка.
Автор перевода: Твердохлеб Е. Д.
Источник: United State Army Field Manual on Direction Finding Operations
Сhapter 3
Technology
Режим доступа: library.enlisted.info
Первые пеленгаторы основывались на петлевой антенне и приемнике, направление на источник радиоизлучения, определялось по максимальному или минимальному уровню сигнала, приходящего на простую неподвижную (рамочную) антенну (Рис.1) такие пеленгаторы можно встретить и сегодня. Одним из недостатков такого метода является то, что уровень сигнала при повороте антенны уменьшается, а уровень шума остается прежним. Что бы преодолеть эту проблему антенну начали вращать. Вращающаяся рамка. Однако, не всегда возможно (не желательно) физически перемешать антенну. Тогда появились антенные решетки в виде комбинации двух скрещенных направленных антенн (пример две рамочные антенны) и вращающейся катушки гониометра для определения направления приходящей волны. Главное преимущество такой системы заключалось в отсутствии механического вращения антенной системы (АС). Сегодня термин гониометр может быть применен к любому устройству для вращения диаграммы направленности антенны.
Рис. 1 Вращающаяся рамка.
Первые электронно-лучевые трубки использовали две скрещенные рамочные антенны для указания пеленга. Вместо того чтобы использовать гониометр, каждый цикл подавали на отдельный канал двухканального приемника. Выходы из приемника были присоединены к пары отклоняющих пластин ЭЛТ. Принятый сигнал отклонял изображение на экране ЭЛТ, а угол наклона указывал на направление пеленга.
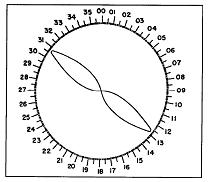
Рис.2 Электроннолучевая трубка.
До конца Второй мировой войны наиболее распространенными, в пеленгационных устройствах, били скрещенные рамочные антенны или антенна Эдкока. (Рис 3) Эти антенны, с небольшими модификациями, используются до сих пор. И применяются в коротковолновом диапазоне. Эти антенны, в отличии от двойной рамки, избавлены от влияния паразитной горизонтальной составляющей сигнала, они были меньше по размера и имели более узкую диаграмму направленности.
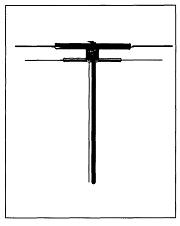
Рис. 3 Антенна Эдкока.
Во времена Второй мировой войны антенна Вулленвебера положила начало эре широкой аппертурной пеленгации. (Рис. 4) Эта решетка состояла из большого количества вертикальных диполей (более сотни), расположенных по кругу на эквидистантном расстоянии. Путем подключения нескольких десятков (около трети элементов) последовательно расположенных диполей кольцевой антенной решетки к приемнику, получали узкий луч ДН. Последовательно подключая (с помощью гониометра ) различные диполи решетки, проводили сканирование луча по всему азимуту, пеленг определяли по максимуму принимаемого сигнала.
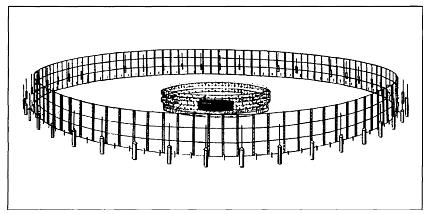
Рис. 4 Антенная решетка Вулленвебера.
Дальнейшая эволюция системы Вулленвебера называется квази – допплеровской или псевдо – доплеровской системой. (Рис. 5) Этот вариант так же называют коммутируемыми АР. Большинство из первых наземных пеленгационных станций били именно такого типа. В теории сигнал, принятый АР, модулируется по частоте, а следовательно и по фазе, т.о. фаза принимаемого колебания изменяется во времени, пропорционально скорости вращения диаграммы направленности. Элементы АР поочередно подключаются к приемнику с помощью гониометра. Сигнал, принятый на элементы АР, сравнивается с фазой сигнала, принятого на опорную антенну. Разность фаз в антеннах указывает на направление пеленга.
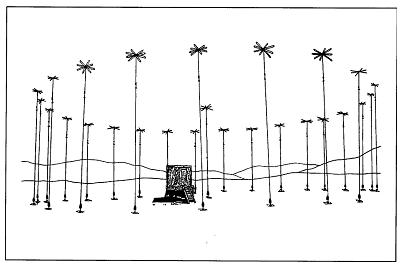
Рис. 5 Квази – допплеровская система.
Это системы совершенно другого класса. Азимут на направление ИРИ не определяется путем вращения антенного элемента. Он берется из фазовых изменений сигналов в пространственно разнесенных антеннах. Интерферометр принимает массив сигналов, и анализирует их. Анализ может выполняться двумя способами, в зависимости от типа системы, или применяется комбинированный способ.
При анализе фронта волны принимаются все сигналы, и анализируются комплексные составляющие напряжонности на антенных элементах, изменяющиеся в условиях интерференции волн. При тестировании фронта фолны измеряется линейный сдвиг фаз, в антенных элементах массива, с примерно одинаковыми амплитудами. Этот процесс так же называют совпадение интерферометрии.
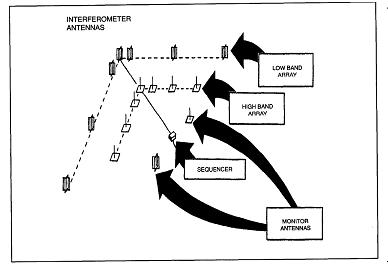
Рис. 6 Интерферометрическая система.
Есть пеленгаторы, которые измеряют временную задержку между излучаемым и принятым (отраженным) колебанием. Однопозиционные пеленгационные станции могут определять направление на объект. Некоторые могут определять только азимут, другие – азимут и угол места, в некоторых станциях угол места может быть измерен только после определения азимута. Для определения местоположения объекта необходимо не менее двух пеленгационных станций.
Система допплеровских пеленгаторов основана на принципе движения волн Кристиана Йогана Допплера, получившем название эффект Допплера. Принцип заключается в том, что при быстром движении приемника и источника сигнала, происходит искажение частоты. Частота волн увеличивается в зависимости от скорости и направлении движения наблюдателя. Ярким примером эффекта Допплера является изменение звука свистка поезда, когда он приближается к наблюдателю на большой скорости, а потом удаляется от него. При приближении поезда, частота звука растет, при удалении – уменьшается. В идеальном случае эффект Допплера может быть получении путем быстрого вращения антенного элемента по кругу. (Рис. 7)
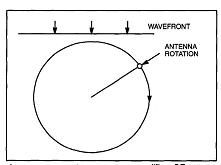
Рис. 7 Пример вращения антенного элемента.
В этом случае частота принимаемого сигнала будет меньше, чем рабочая частота ИРИ. Частота принятых колебаний была бы больше, если бы антенна двигалась на фронт волны, а не от него. Частота принимаемых колебаний остается неизменной при движении антенны перпендикулярно направлению прихода электромагнитной волны. Этот процесс приводит к синусоидальному изменению частоты, а соответственно и фазы принимаемых колебаний, как показано на (Рис. 8)
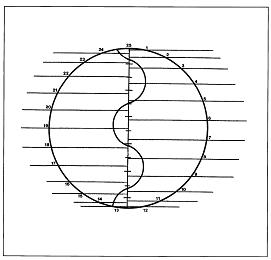
Рис. 8 Изменение фазы принимаемого сообщения, в зависимости от направления вращения антенного элемента.
Направление движения ЭМВ определяется при сравнении фазы колебания, принятого на подвижную и опорную (не подвижную) антенну. Недостатком является невозможность достичь большой скорости вращения антенны механическим способом. Что бы устранить этот недостаток, используется система из одинаковых антенных элементов, расположенных по окружности, и включаемых поочередно с помощью антенного коммутатора. (Рис. 9)

Рис. 9 Схема подключения антенных элементов.
Сигнал с передатчика вызывает одинаковое, по амплитуде, но разное по фазе, напряжение во всех антенных элементах. Сигнал в антенне изменяется в зависимости от частоты и направления прихода сигнала. (Рис. 10) Минимальная разность фаз наблюдается между теми антенными элементами, которые стоят параллельно направлению движению фронта волны.
Минимальная разность фаз, в паре антенных элементов, находящихся перпендикулярно фронту прихода волны. Антенны включаются поочередно, имитируя движение одной антенны по кругу. Влияние соседних элементов антенной решетки на характеристики пеленгатора сведено к минимуму. Изменение частоты модуляции, зависит только от изменения частоты сканирования, а фаза, модулирующего колебания, от направления прихода волны.
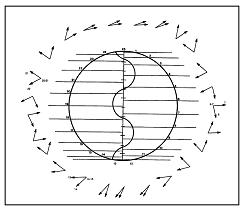
Рис. 10 разность фаз в антенных элементах, в зависимости то направления прихода волны.