
Реферат за темою випускної роботи
"Дослідження радіодальноміра на основі j-кореляційної обробки сигналів"
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета роботи
- 3. Короткий огляд широко відомих методів вимірювання дальності
- 3.1 Імпульсний метод
- 3.2 Частотний метод
- 3.3 Фазовий метод
- 4. Опис схеми радіодальноміра на основі J–кореляційної обробки сигналу
- Висновки
- Перелік посилань
Вступ
Радіолокацією називається сукупність методів і технічних засобів, призначених для виявлення різних об'єктів у просторі, вимірювання їх координат і параметрів руху за допомогою прийому та аналізу електромагнітних хвиль, випромінюваних або перевипромінюють об'єктами.
Радіолокація як науково–технічний напрям в радіотехніці зародилося 30–х роках. Досягнення авіаційної техніки зумовили необхідність розробки нових засобів виявлення літаків, що володіють високими характеристиками (дальністю, точністю). Такими засобами виявилися радіолокаційні системи.
Видатний внесок у розвиток радіолокації внесли російські вчені та інженери П.К. Ощепков, М.М. Лобанов, Ю.К. Коровін, Б.К. Шембель. У радянському союзі перші успішні експерименти виявлення літаків за допомогою радіолокаційних пристроїв були проведені ще в 1934/36 рр.. У 1939 р. на озброєння військ ППО надійшли перші серійні вітчизняні радіолокатори. Суттєвим кроком у розвитку радіолокації було створення в 1940/41 рр.. під керівництвом Ю.Б. Кобзарева імпульсного радіолокатора. В даний час радіолокація одна з найбільш прогресуючих областей радіотехніки.
Отримання інформації в радіолокації пов'язане зі спостереженням деякої області простору. Технічні засоби, за допомогою яких ведеться радіолокаційне спостереження, називаються радіолокаційними станціями (РЛС), а спостережувані об'єкти – радіолокаційними цілями. Типовими цілями є літаки, ракети, кораблі, наземні інженерні споруди [5].
Основні вимоги до радіолокаційним вимірювачам: висока точність вимірювань; темп вимірювань повинен відповідати кількості одночасно спостережуваних цілей та їх швидкостями; прийнятий метод вимірювань повинен задовольняти необхідної роздільної здатності РЛС; метод вимірювань повинен відповідати застосовуваної системі виявлення. Остання вимога полегшується тим, що оптимальна фільтрація і кореляційна обробка сигналів сприяють не тільки виявлення слабких сигналів, а й підвищенню точності вимірювань. Все ж деякі відмінності є: щоб поєднати задані ймовірності правильного виявлення і помилкової тривоги, вибирають проміжний поріг виявлення, тоді як найбільша точність виходить при фіксації піку оптимально обробленого сигналу [7].
Радіолокаційні вимірювачі класифікуються за такими ознаками:
- Безперервне вимірювання поточних координат і швидкостей цілей, зване супроводом (стеженням), може бути ручним (напівавтоматичним) або автоматичним. Вимірники, що застосовуються для цього, класифікуються відповідно як неследящіе або стежать.
- За кількістю каналів вимірювачі поділяються на одноканальні та багатоканальні.
- За вимірюваної координаті або параметру руху мети розрізняють вимірювачі дальності, азимута, кута місця (висоти), радіальної і кутовий швидкості.
- За методом вимірювання – це амплітудний, частотний, фазовий, доплерівський та інші методи, залежно від того, який параметр сигналу служить основою для вимірів.
Рисунок 1 – Принцип дії імпульсного радара
(анімація: 9 кадрів, кількість циклів повторення: нескінченно, 16 кілобайт)
1. Актуальність теми
Кореляційні методи обробки набули широкого поширення в радіотехнічних системах, однак, в радіолокаційних станціях застосування цих методів обмежена. Перш за все, це пов'язано з несприятливим ефектом Доплера на кореляційну функцію, тому що в цьому випадку максимум кореляційної функції R (z) при z = 0 зменшується і змінюється хід кореляційної функції. Тому локація рухомих цілей за допомогою кореляційної пеленгації сильно утруднена [6].
J–кореляційний спосіб вимірювання дальності був вперше розроблений доцентом кафедри "Радіотехніки та захисту інформації" Донецького національного технічного університету, професором Сорочаном Анатолієм Григоровичем.
2. Мета роботи
Метою даної роботи є статистичний аналіз радіодальномера на основі J–кореляційної обробки сигналу, визначення його потенційної точності вимірювання.
3. Короткий огляд широко відомих методів вимірювання дальності
Вимірювання дальності до об'єкта є одним з обов'язкових елементів вирішення головного радіонавігаційної завдання. Фізичним підставою виміру дальності є фіксація часу поширення радіосигналу між метою та радіолокаційною станцією [4].
3.1 Імпульсний метод
Це один з амплітудних методів радіолокаційних вимірювань: для його реалізації незгасаючі коливання несучої частоти піддаються в передавачі амплітудно–імпульсної модуляції.
Функціональна схема далекоміра представлена на рис. 1, а часові діаграми – на рис. 2. Синхронізатор РЛС створює імпульси зі строго стабільним періодом проходження. Цими імпульсами одночасно запускаються передавач і генератор розгортки, напруга якого подається на горизонтально відхиляючі пластини ЕПТ.
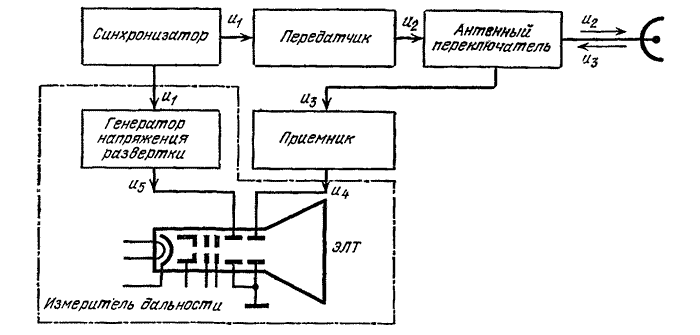
Рисунок 2. Функціональна схема імпульсного радіодальноміра
Радіоімпульси передавача мають ту ж частоту слідування, що і синхронізуючі імпульси U1. Антенний перемикач спрямовує зондувальні імпульси в антену і закриває вхід приймача на час передачі. Після відбиття від мети утворюються радіолокаційні імпульси U3, які приймаються тією ж антеною. Внаслідок недосконалості антенного перемикача на вхід приймача проникає мала частка високочастотної енергії передавача, яка служить опорним сигналом для відліку дальності. Всі ці радіоімпульси посилюються і детектируются в приймачі, в результаті чого виходять відеоімпульси U4. Додані до вертикально відхиляють пластинам ЕПТ, вони викликають вертикальне відхилення світлового плями на екрані трубки. Місце відхилення залежить від напруги розгортки U5 в даний момент часу t.
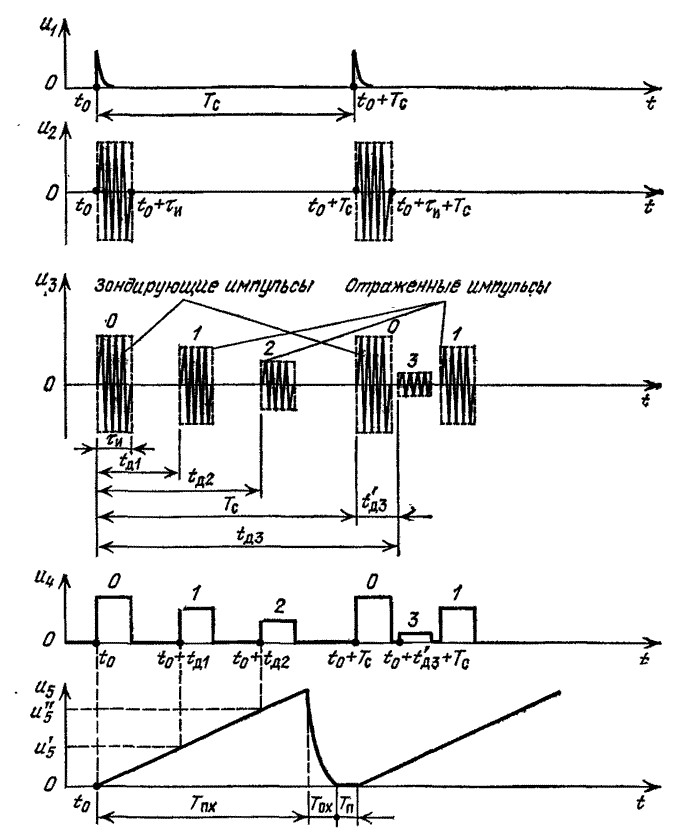
Рисунок 3. Часові діаграми напруг в імпульсному радіолокаційному далекомірі
Напруга U5 Пікоподібне, воно наростає з постійною швидкістю під час прямого ходу розгорнення і швидко зменшується до вихідної величини під час зворотного ходу розгортки; далі йде інтервал спокою аж до початку чергового циклу розгортки. У зв'язку з запізненням на час tд відбитого сигналу відмітка його зміщена від початку розгортки на відстань

Основні показники імпульсного методу дальнометрії:
- Потенциальная разрешающая способность по дальности определяется из тех соображений, что при сближении целей, их импульсы различаются до тех пор, пока разность времени запаздывания не сократится до длительности одного импульса. Этот предел соответствует расстоянию между целями
- Потенциальная разрешающая способность по дальности определяется из тех соображений, что при сближении целей, их импульсы различаются до тех пор, пока разность времени запаздывания не сократится до длительности одного импульса. Этот предел соответствует расстоянию между целями
- Межа однозначного відліку дальності. Кожна РЛС у відповідності зі своїм енергетичним потенціалом має максимальну дальність дії Дмакс. Необхідно, щоб період проходження імпульсів Тс був більше, ніж tдмакс. Якщо ця умова не дотримується, то сигнал, відбитий від досить віддаленій цілі, приймається після випромінювання чергового зондуючого імпульсу 0 і відлік дальності стає неоднозначним. Таким чином, однозначну відлік дальності обмежується періодом Тс.
- Потенційна точність виміру дальності виражається формулою, справедливою для всіх методів дальнометрії:

Перевага імпульсного методу вимірювання дальності в тому, що при порівняно простий апаратурі, дозволяє одночасно вимірювати дальність багатьох об'єктів.
До недоліків методу відносяться неможливість вимірювання малих дальностей, цей недолік пояснюється тим, що під час випромінювання зондуючого сигналу приймач замкнений. Даний метод не забезпечує вимірювання радіальної швидкості мети [1].
3.2 Частотний метод
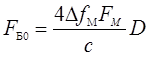
Визначення дальності до цілі при використанні частотної модуляції (ЧМ) засновано на вимірі збільшення частоти передавача за час поширення сигналу до цілі і назад. Якщо припустити, що частота передавача може змінюватися за лінійним законом, то зміна частоти відбитого сигналу буде запізнюватися на час tз = 2D / c. В результаті змішування цих коливань утворюються биття, огинає яких є чисто гармонійним коливанням, тобто її спектр складається з однієї спектральної лінії. Величина приросту частоти (частота биття) дорівнює
На практиці використовуються різні види періодичної модуляції частоти, наприклад: симетричний і несиметричний пилкоподібні закони, синусоїдальний закон.
Розглянемо випадок симетричного пилоподібного закону ЧС. Структурна схема такої РЛС (далекоміра) наведена на рис. 4.
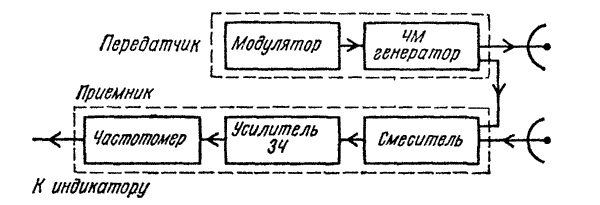
Рисунок 4. Функціональна схема частотного радіодальноміра
Сигнал передатчика попадает на вход приемника (в смеситель) через антенну либо по специальной линии передачи. Отраженный сигнал от неподвижной цели, также попадающий на вход приемника, запаздывает на время tз. В результате смешения (сложения) двух колебаний на входе приемника образуются биения.
Миттєва частота биття дорівнює абсолютному значенню різниці миттєвих значень частот випромінюваного і відбитого сигналів, хоча формально можна враховувати знак частоти. Сказане ілюструється рис. 5. Частоту биття, яка протягом більшої частини періоду модуляції залишається постійною, назвемо основною. Її значення, дорівнює
Невеликі відрізки часу, рівні часу запізнювання tз, протягом яких частота не залишається постійною, називають зонами звернення. У середніх точках цих зон функція проходить через нуль. Вплив зон звернення тим менше, чим краще виконується нерівність tм>>tз.
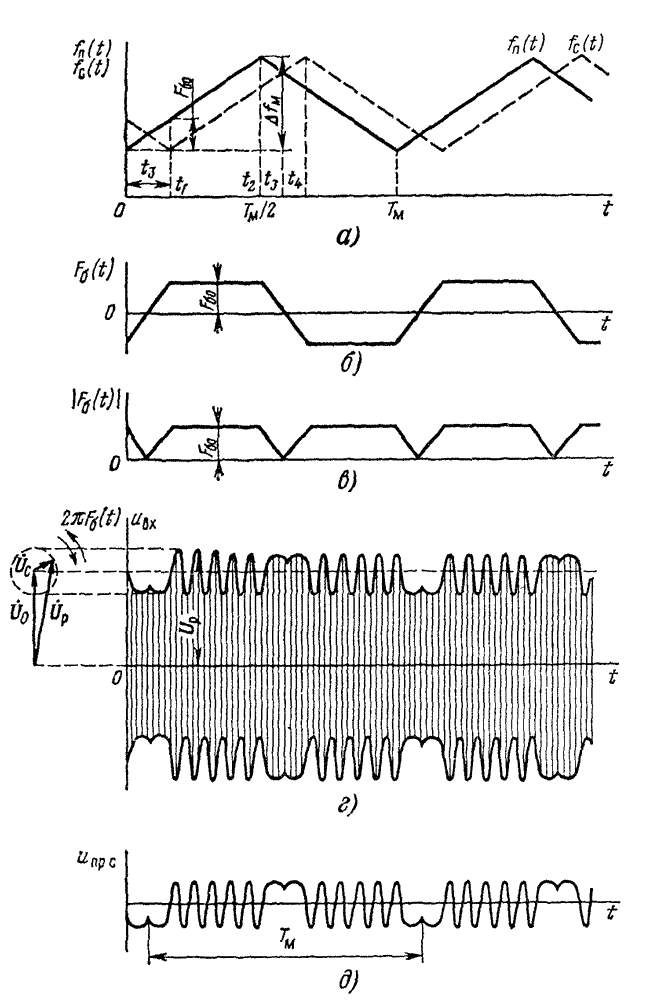
Рисунок 5. Часові діаграми процесів в частотному радіодальноміра
Після детектування в змішувачі виділяється огинає биття, зазвичай іменована перетвореним сигналом. Перетворений сигнал має постійну частоту, виключаючи ділянки тривалістю tз віддалені один від одного на відстані tм/2, всередині яких його фаза змінюється на 180 °. Щоб визначити дальність, необхідно виміряти Fб0. Для цього може бути використаний аналізатор спектру (частотний метод). У разі одиночної цілі часто застосовується більш простий частотомір, що працює за принципом рахунки числа періодів (часовий метод).
Чутливість приймача з безперервним випромінюванням радіохвиль обмежена шумами передавача. Для зменшення їх впливу слід збільшувати розв'язку (перехідне затухання) між антенами. Застосування компенсації прямого сигналу дає розв'язку 10 ... 60 дБ.
Широке застосування знайшов досить просто реалізований метод вимірювання частоти биття шляхом рахунки числа імпульсів перетвореного сигналу. При цьому перетворений сигнал піддається обмеження та диференціювання, після чого позитивні чи негативні імпульси запускають формувач, що виробляє стандартні імпульси (певної амплітуди, тривалості і форми). Останні заряджають накопичувальний конденсатор лічильника. При симетричному пікоподібному законі модуляції число імпульсів за період модуляції дорівнює

Суттєвим фактором, що впливає на рахунок числа імпульсів, є "паразитна" амплітудна модуляція зондуючого і відбитого сигналів, викликана резонансними властивостями коливальних систем передавача, входу приймача і антен, вібраціями, флуктуаціями коефіцієнта відображення. Вплив паразитної модуляції можна зменшити застосуванням балансного змішувача.
До недоліків частотного методу дальнометріі відносяться: складність апаратури при дальнометріі багатьох об'єктів; труднощі ефективної розв'язки приймального і передавального трактів, необхідної для нормальної роботи далекоміра; високі вимоги до лінійності зміни частоти випромінюваних коливань при дальнометріі багатьох об'єктів.
Основні переваги частотного методу вимірювання дальності – це мала пікова потужність випромінюваного сигналу в порівнянні з потужністю при імпульсному методі при високій точності вимірювання та роздільної здатності по дальності і можливість вимірювання дуже малих дальностей.
Зазначені переваги і недоліки частотного методу вимірювання дальності визначили його використання в радіовисотомір малих висот. При цьому вимірюється дальність до єдиного об'єкта (поверхні суші або води). При дальнометріі одного об'єкта частота випромінюваного сигналу може змінюватися за синусоїдальним або іншому, не обов'язково пилоподібного закону, що значно спрощує апаратуру [2].
3.3 Фазовий метод
При фазовому методі застосовуються безперервні сигнали (не обов'язково монохроматичні). Вимірювання часу запізнювання проводиться шляхом вимірювання різниці фаз між модулюють коливаннями масштабної частоти, які виділяються з випромінюваного і прийнятого сигналів. Різниця фаз між цими коливаннями пов'язана з часом запізнювання рівністю

Різниця фаз може бути однозначно виміряна в інтервалі (0; 360°). Тому максимальна дальність, в межах якої можливо однозначне вимір, визначається співвідношенням

Для забезпечення однозначних вимірів, наприклад, в межах від 0 до 100 км масштабна частота не повинна перевищувати 1,5 кГц. Настільки низькі значення виключають можливість використання в якості масштабної частоти несучих коливань випромінюваних далекоміром радіосигналів. У практично застосовуваних фазових далекомірах як масштабних використовуються або частоти модулюють коливань, або частоти биття між несучими коливаннями випромінюваних сигналів (рис. 6).
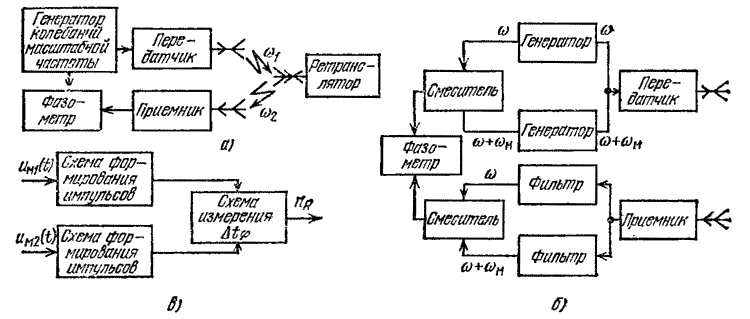
Рисунок 6. Функціональні схеми фазових радіодальномірів
При вимірі різниці фаз на частоті биття передавачем далекоміра одночасно випромінюються два гармонійних сигналу. Різниця фаз між биттям частоти, які виділяються за допомогою змішувача і фільтра з випромінюваного і прийнятого сигналів, визначається формулою
В якості вимірювача різниці фаз можуть використовуватися фазометри різних типів.
Основна перевага фазового методу полягає в тому, що вибором масштабної частоти може бути забезпечена дуже висока точність вимірювань. Разом з тим цей метод має ряд істотних недоліків: неможливість одночасного вимірювання дальності кількох об'єктів, що знаходяться в зоні опромінення далекоміра; необхідність придушення випромінюваного сигналу, який надходить на вхід приймача; складність технічної реалізації, яка обумовлена необхідністю використання декількох шкал [3].
4. Опис схеми радіодальноміра на основі J–кореляційної обробки сигналу
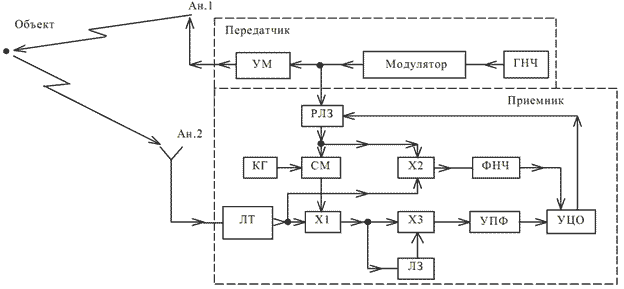
Рисунок 7. Структурна схема радиодальноміра на основі J–кореляційної обробки сигналу
Ан. 1, Ан. 2 – передавальна і приймальна антени, ЛТ – лінійний тракт, УМ – підсилювач потужності, КГ – кварцовий генератор, РЛЗ – калібрована регульована лінія затримки, СМ – змішувач, Х1 – Х3 – перший – третій перемножителя, ЛЗ – лінія затримки, ФНЧ – фільтр нижніх частот, УПФ – вузькосмуговий смуговий фільтр, ГНЧ – генератор низької частоти, УЦО – пристрій цифрової обробки сигналів.
Висновки
Дана магістерська робота присвячена актуальній науковій задачі дослідження радіодальномера на основі j–кореляційної обробки сігналов.Проведенний аналіз радіодальномера показує можливість досягнення високих потенційних характеристик. Точність вимірювання залежить від вхідного співвідношення сигнал/шум, параметрів сигналу і пристрою, що реалізує метод.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2012 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Финкельштейн М. И. Основы радиолокации: Учебник для вузов. 1983. – 536 с.
- Теоретические основы радиолокации: Учебное пособие для вузов. Под ред. В. Е. Дулевича. 1978. – 608 с.
- Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства: Учебник для техникумов. 1975. – 336 с.
- Монаков А. А. Теоретические основы радионавигации: Учебное пособие. 2002. – 70 с.
- Коростелев А. А., Клюева Н. Ф., Мельник Ю. А. Теоретические основы радиолокации. 1978. – 608 с.
- Сорочан А. Г. Радиодальномер на основе j–корреляционной обработки сигнала.//Технология и конструирование в электронной аппаратуре. 2005.
- Васин В. В. Справочник–задачник по радиолокации. 1977. – 320 с.