Столкновение вертолета с наземными объектами. Бортовая радиолокационная система предупреждения
Автор: Войнич Б.,Сосновский А.,Буянов Д.,Трошин Д.
Источник: Электроника выпуск #4/2001
Автор: Войнич Б.,Сосновский А.,Буянов Д.,Трошин Д.
Источник: Электроника выпуск #4/2001
В последние годы количество столкновений вертолетов с наземными объектами – зданиями, линиями электропередач и т.п. – резко увеличилось. Основная причина аварий – в недостаточном секторе обзора из кабины. Особенно затруднено, а в ряде случаев просто невозможно визуальное наблюдение за хвостовой частью вертолета. Решение проблемы авторы видят в размещении на обшивке вертолета микроэлектронных активных фазированных антенных решеток, которые выполняют роль радиодальномера, оповещающего пилота об угрозе столкновения.
Как известно, основные преимущества вертолета проявляются при полете на малых высотах (менее 50 м) над рельефом местности, где использование других летательных аппаратов невозможно. Но именно на этих высотах, как свидетельствует анализ отечественной и зарубежной статистики, происходит примерно две трети катастроф вертолетов.
При использовании вертолетов на спасательных работах, при строительстве, тушении пожаров, где опасность столкновения наиболее высока, пилоту приходится следить не только за ходом работ, но и за тем, чтобы избежать аварий. А это очень трудно, поскольку конструкция современных вертолетов не позволяет контролировать дистанцию между наземными объектами и машиной. Так, например, чтобы увидеть конец лопасти несущего винта вертолета Ми-8, когда она расположена сбоку (то есть под углом 90° к продольной оси вертолета), пилот должен повернуть голову примерно на 120° (!). Поэтому вероятность возникновения катастроф при таких режимах полета чрезвычайно высока.
Для ее снижения требуются специальные средства контроля, которые сигнализировали бы пилоту об опасном приближении машины к препятствию и необходимости совершить соответствующий маневр. Для этого вокруг вертолета выделяется аварийная зона, при попадании в которую препятствий возникает угроза столкновения. Размер зоны должен быть таким, чтобы пилот успел среагировать на опасное приближение к угрожающему объекту. Целесообразно также выделить еще одну зону – предупредительную, размер которой несколько больше, чем у аварийной. Наличие препятствий в этой зоне не может привести к столкновению, но сигнализация о попадании в нее объектов, угрожающих столкновением, давала бы пилоту дополнительную информацию и облегчала его работу. Таким образом, в кабине необходим индикатор, сообщающий пилоту о наличии препятствий в той или иной зоне. Средства контроля должны содержать аппаратуру, измеряющую дальность до препятствия и его угловые координаты. Для решения этой задачи можно использовать два метода – оптический и радиолокационный. Основное достоинство оптического метода – определение дальности с достаточно высокой точностью, однако волнам оптического диапазона свойственно значительное поглощение в атмосфере. Поскольку задача в данном случае не требует высокой точности измерения дальности до препятствий, целесообразно использовать радиолокатор. Радиоволны менее подвержены воздействию атмосферы и позволяют работать и при задымлении, и в пыли.
Обычно в радиолокаторе используется сканирующая антенна, которая устанавливается в носовой части вертолета. Но она обозревает лишь небольшой сектор пространства в передней полусфере машины, и для решения задачи защиты потребуется несколько антенн. Таким образом, использование классических сканирующих антенн исключено – для их размещения просто нет места. Поэтому целесообразно использовать несканирующие антенны, каждая из которых обслуживает определенный сектор пространства и входит в состав соответствующего радиолокатора.
Радиолокаторы должны быть размещены на обшивке вертолета таким образом, чтобы вокруг него прослеживалось все пространство. Их следует установить по бокам кабины, чтобы исключить касание препятствия лопастями несущего винта, а также на боковых и задней части хвостовой балки для защиты ее от столкновений. Размещать радиолокатор впереди вертолета не требуется, поскольку эта часть пространства находится в поле зрения экипажа.
При определении дальности до препятствия предлагается использовать непрерывный сигнал, поскольку применение импульсного сигнала создаст некоторые трудности. В связи с тем, что измеряемые расстояния достаточно малы (порядка нескольких десятков метров), необходимо излучение очень коротких импульсов – порядка 10 – 9 с, что обусловливает увеличение пиковой мощности, а она ограничена используемыми электронными приборами. Применение фазового дальномера исключено – он не обладает разрешающей способностью по дальности. Для измерения дальности рекомендуется использовать следящий частотный радиодальномер, который достаточно точен и широко применяется как радиовысотомер.
В качестве приемопередающих приборов предлагаются универсальные микроэлектронные активные фазированные антенные решетки (МАФАР), которые выгодно отличаются от аналогичных устройств других типов. Модули МАФАР работают на длине волны 8 мм. Малые габариты и масса позволяют разместить их на обшивке вертолета. Кроме того, они обладают высокой надежностью. Интенсивное поглощение радиоволн миллиметрового диапазона в нашем случае не имеет решающего значения, так как система рассчитана на небольшую дальность (порядка нескольких десятков метров).
Модуль МАФАР представляет собой поликоровую подложку размером 40*40*0,25 мм. На одной ее стороне размещена решетка из 64 прямоугольных микрополосковых излучателей, питание которых осуществляется с помощью микрополосковой линии по разветвленной схеме, то есть по схеме параллельного синфазного питания. Изгибы линий выполнены так, что их длина кратна l/2 (где l – длина волны). На обратной стороне подложки с металлизированной поверхностью размещены полупроводниковые активные элементы. При необходимости активные устройства можно разместить и на передней стороне модуля. Ширина диаграммы направленности модуля около 12°. Благодаря особой схеме модулятора, которая способна выполнять и функцию смесителя для приемного тракта, модуль можно использовать как в передающих, так и в приемных радиотрактах.
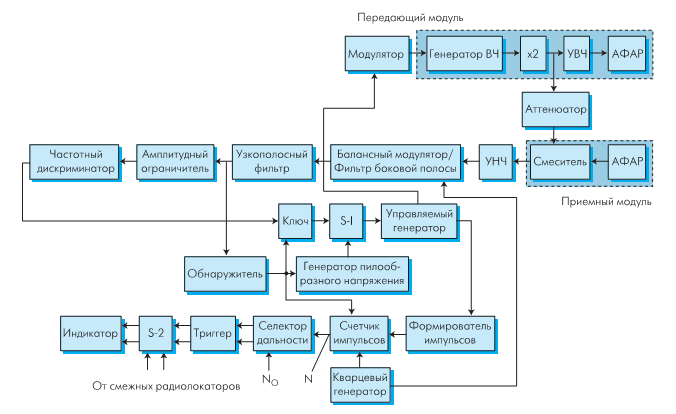
Рисунок 1 – Функциональная схема радиодальномера
Как видно из функциональной схемы одного радиолокатора (рис.1), его высокочастотная часть включает генератор ВЧ, умножитель ВЧ, УВЧ, смеситель, а также приемную и передающую антенные решетки, построенные на универсальных модулях АФАР. В роли сигнала гетеродина для смесителя выступает напряжение зондирующего сигнала после умножителя. Аттенюатор служит для подбора нужного значения этого напряжения.