
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Цель и задачи исследования, планируемые результаты
- 2. Составление проекта наземной фотограмметрической съемки
- 3. Обработка снимков
- Заключение
Введение
Фотограмметрические методы в геодезии являются одними из наиболее рентабельных и высокопроизводительных. Основными превосходствами фотограмметрического метода является значительное сокращение времени полевых работ, возможность повторить или дополнить измерения при исходных условиях. К недостаткам можно отнести то, что качество изображения зависит от уровня освещения, посторонние объекты могут создавать мертвые зоны на снимки.
На сегодняшний день, существующие аналоговые камеры типа фототеодолит морально устарели, и, кроме того, не производятся аналоговые светочувствительные материалы. Профессиональные цифровые камеры имеют высокую цену и, при небольших объёмах наземной съемки, их использование будет неприбыльным. Неспециализированные цифровые камеры дают возможность получить изображение в цифровом виде и также выполнять обработку снимков на цифровой фотограмметрической станции. Следовательно возникает необходимость определения точности такой обработки.
Для успешного решения задачи изучения памятников архитектуры, наблюдения за деформациями сооружений требуется наличие их достоверных изображений. Определение натурных размеров сооружений по измерениям моделей выполняют для таких проектируемых сооружений, формы которых не могут быть выражены математическими уравнениями, - скульптур, барельефов и т.д.
1. Цель и задачи исследования, планируемые результаты
Целью магистерской работы является обоснование использования неспециализированной камеры для целей архитектурной стереофотограмметрической съемки. Для этого необходимо решить следующую научную задачу: определить точность, которую можно получить при стереофотосъемке архитектурного объекта, используя неметрическую фотокамеру. Прикладной задачей исследования является сравнение полученной модели с моделью, построенной с помощью электронного тахеометра.
На основании полученной точности и результатов сравнения будет определен оптимальный метод создания трехмерных моделей объектов архитектуры.
Объектом исследования является наземная стереофотограмметрическая съемка. Предмет - точность, с которой можно выполнить стереофотосъемку неспециализированной фотокамерой.
2. Составление проекта наземной фотограмметрической съемки.
Первым этапом эксперемента была наземная стереофотограмметрическая съемка. Объектом съемки был выбран фасад 5го корпуса ДонНТУ, съемка производилась 5 мПикс фотоаппаратом Olympus E-20P.
Виды наземной стереофотограмметрической съемки классифицируются в зависимости от расположения осей камеры относительно базиса. При выполнении съемки использовался конвергентный случай фотографирования, базис 4 м.
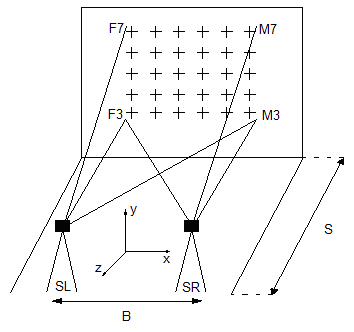
Рисунок 1 – Конвергентный случай фотографирования
При конвергентном случае фотографирования оптические оси фотокамер пересекаются, коородинаты объекта определяют путем измерения стереомодели. За начало фотограмметрической системы координат принимают оптический центр объектива на левой точке базиса фотографирования, т. е. центр проекции левого снимка, за ось ординат – направление оптической оси фотокамеры на левой точке базиса, перпендикулярное ему направление в горизонтальной плоскости – за ось абсцисс Х, за ось аппликат – направление, перпендикулярное плоскости, образованной осями X, Y.
Значение элементов внешнего ориентирования, необходимые для ычисления фотограмметрических координат определяют в процессе фотографирования. Элементы внутреннего ориентирования известны, т.к. фотокамера цифровая, или определяются по результатам исследования камеры.
После выбора станций приступают к проектированию базисов, которые должны удовлетворять следующим требованиям:
- съемочные трапеции должны покрывать весь снимаемый участок без разрывов и больших перекрытий. Концы базиса располагаются в удобных местах;
- в пределах съемочных трапеций не должно быть участков, в которых не видно объекта или стереоэффекта.
Для расчета рамок съемочных трапеций используют следующие формуламы:
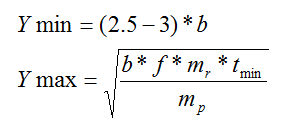
где tmin – коэффициент, учитывающий отклонение осей съемки (мы принимаем 1); mp – точность снятия координат на изображении; mr – допустимая с.к.о. определения координат контура.
На основании расчетов и выбранной камеры, намечается положение базиса. На каждой съемочной трапеции намечают положение корректурных точек. Это такие точки, для которых известны измеренные геодезические координаты (опорная точка) или направления (угол между направлением на корректурную точку и направлением на базис). Координаты опорных точек будут получены из результатов съемки электронным тахеометром в безотражательном режиме.
Расчет длины базиса выполняется исходя из дальности фотографирования и требуемой точности определения координат съемочных пикетов.
Предрасчет точности можно выполнить по следующим формулам:
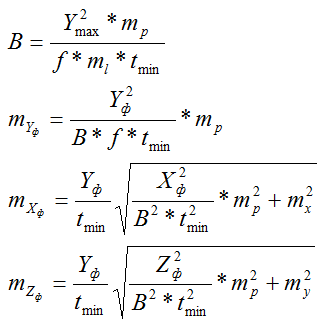
где ml – с.к.о. съемочного пикета (1см); mx=my=mp=0.5 пикселя.
3. Обработка снимков
Следующим этапом работы была обработка стереопары с ЦФС Erdas Imagine.
Каждый файл проекта, созданного в Erdas Imagine содержит информацию обо всех маршрутах и снимках, включенных в план фотосъемки. В частности, данные о расположении снимков, параметры камеры, измерения координатных меток, опорных и связующих точек.
При нанесении на снимки, координаты опорных точек, предварительно полученных в результате тахеометрической съемки в безотражательном режиме, вводят вручную, а координаты дополнительных точек определяются автоматически. Математические соотношения между снимками, составляющими блок, устанавливается функцией Триангуляция, и в процессе ее выполнения вычисляются окончательных значений для параметров внешнего ориентирования. В отчете триангуляции представлена оценка точности уравнивания стереопары.
Схема расположения снимков стереопары, опорных и связующих точек после уравнивания представлена. Поле этого проект готов к финальной части создания цифровой модели.
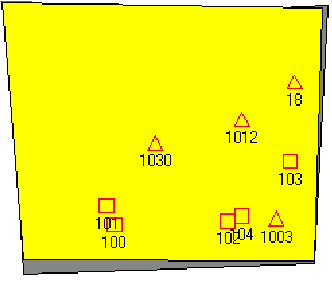
Рисунок 2 – Схема расположения снимков после уравнивания.
В процессе отрисовки структурных линий использовался Planar Dual-LCD Professional 3D Mnitor, который позволяет просматривать объемное изображение высокого качества. Это позволяет ускорит процесс обработки, значительным образом влияет на удобство работы.
Следующим этапом была обработка маршрута в ЦФС Delta Digitals.
И так, были получены две 3-х мерных цифровых модели одного объекта. Из-за разных алгоритмов уравнивания полученные модели отличаются. Влияние продольного и поперечного параллакса больше в модели уравненной в Erdas Imagine, соответственно модель, уравненная в Block MSG геометрически точнее. Время на построение модели в цифровых станциях было затрачено практически одинаково, но работать в стерео режиме гораздо удобнее.
Недостатком проведенного эксперимента явлется то, что опрные точки, которе использовались для ориентирования снимков небыли обозначены на самом оъбекте марками во время съемки, соответсвенно точность определения положения опроной точки на снимке могла достигать 30 милиметров на местности, что существенно полвияло на точность построения модели, соответственно результаты определения точности не могут считаться обьективными.
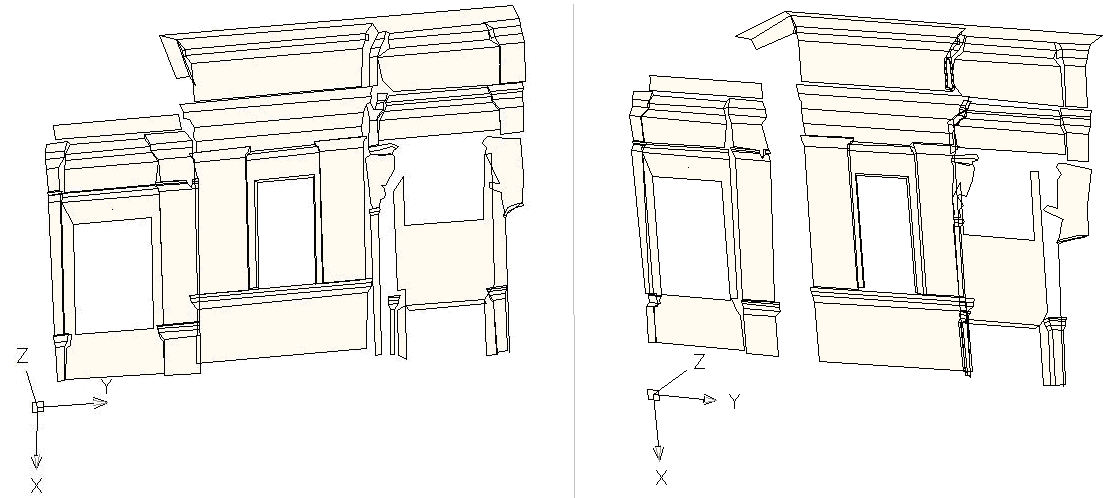
Рисунок 3 – Модель снимаемого объекта.
Этот недостаток был учтен при повторении эксперемента.
Так же, в ходе полевых работ были опредены кооординаты фатокамеры в момент съемки, чтобы в дальнейшем исследовать, повысит ли это точность построения модели.

Рисунок 4 – Ход выполнения полевых работ.
Заключение
В результате работы будут получены три 3-D модели снимаемого объекта. Одна модель будет построена традиционным методом (на основе тахеометрической съемки), еще две модели будут получены в разных ЦФС ( из-за разных алгоритмов уравнивания в ЦФС, полученные модели будут отличаться).
Фотограмметрический метод построения модели обладает неоспоримым преимуществом в плане удобства измерений, т.к. исходные данные хранятся в памяти компьютера и, в случае ошибки, нет необходимости в повторных полевых измерениях, сами полевые работы занимают гораздо меньше времени, камеральная обработка выполняется относительно быстро.
Точность получения координат тахеометрическим методом заведомо выше, но для решения ряда задач будет достаточно точности, которой можно добиться фотограмметрическим методом. Сравнив все показатели и характеристики обоих методов, можно будет сделать выводы о целесообразности, рентабельности, трудоемкости применения фотограмметрического и тахеометрического методов.
При написании данного реферата магистерская работа еще не закончена. Окончательное завершение – декабрь 2012 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Буров М.И. Практикум по фотограмметрии / Буров М.И. - М.: НЕДРА, 1987. - 302 с.
- Могильный С.Г. Фотограмметрия / Могильный С.Г., Беликов И.Л., Ахонина Л.И., и др. - Киев: Вища школа, 1985. - 278 с.
- Назаров А.С. Фотограмметрия: учебное пособие для студентов вузов / Назаров А.С. - Минск: ТетраСистемс, 2006. - 368с.
- Агапов С.В. Фотограмметрия сканерных снимков / Агапов С.В. - М.: Геодезиздат, 1996. - 178 с.
- Калантаров Е.И., Говоров А.В., Никишин Д.А. Универсальные методы цифровой фотограмметрии. // Известия ВУЗов. Геодезия и аэрофотосъемка. – 2003. – №6. – С. 47-55
- Калантаров Е.И., Никишин Д.А. Развитие процессов фотограмметрии перспективными методами. // Известия ВУЗов. Геодезия и аэрофотосъемка. – 2003. – №1. – С. 95-104
- Антипов И.Т. Пространственная фототриангуляция с использованием координат центров проектирования // Геодезия и картография. – 2004. – №8. – С. 21-30
- Катушков В.А., Сердюков В.М. Моделирование макетных снимков для задач наземной фотограмметрии. // Геодезия и картография. – 1999. – С. 22-25
- Гельман Р.Н., Никитин А.В. О стереофотосъемке фасада здания // Геодезия и картография. – 2008. – №1. – С. 29-33
- Гельман Р.Н. Возможности использования обычных цифровых камер для наземной стереосъемки. // Геодезия и картография. – 2000. – №4. – С. 39-41