
|
Кішинський Володимир Вікторович |
||
Факультет: |
Інститут інформатики і штучного інтелекту | ||
Специальність: |
Програмне забеспечення систем |
||
Тема випускної роботы: |
Разрабка системи інтелектуального керування рухом мобільного робота |
||
Науковий керівник: |
к.т.н., доц. каф. ПОІСВолченко Олена Володимирівна |
||
РЕФЕРАТЗміст
ВСТУП Дослідженням адаптивних крокуючих машин та управлінням їх рухом займаються багато наукових колективів. Інтерес до цього напрямку пояснюється тим, що в порівнянні з традиційними колісними і гусеничними машинами крокуюча має принципово кращі характеристики при подоланні перешкод, при ходьбі по слабких грунтах, при переміщенні по поверхні зі складним рельєфом. Сучасний рівень технологій та обчислювальної техніки дозволяє будувати не тільки лабораторні макети, але і машини, які можуть служити для виконання конкретних технологічних операцій на складній місцевості. Крокуючі машини є складними механічними системами з великою кількістю керованих ступенів свободи. Кожна нога повинна мати як мінімум три привода, щоб забезпечити можливість помістити стопу в довільну точку в тривимірному просторі в межах певної робочої зони, яка визначається конструкцією ноги. Таким чином, шестинога крокуюча машина повинна мати 18 приводів. Система керування повинна бути побудована так, щоб забезпечити координований рух усіх ніг, що забезпечує заданий рух корпусу. Слід відзначити ту обставину, що завдання планування руху корпуса може вирішуватися єдиними методами для мобільних роботів будь-якого типу: колісних, гусеничних або крокуючих. Специфічною для крокуючої машини є завдання планування рухів ніг. З одного боку, крокуюча машина має кращі здібностями подолання перешкод завдяки тому, що для її переміщення необхідні дискретні опорні точки, а не безперервна колія. З іншого боку, необхідні спеціальні алгоритми пошуку цих опорних точок. В даний час є кілька підходів до побудови систем управління крокуючими машинами. Використовуються принципи централізованого та децентралізованого управління, традиційні методи обчислень і нейроподібні обчислювальні структури. Використання простих алгоритмів, коли управління здійснюється окремими приводами або рухом корпусу і окремих ніг поперемінно є безперспективним і малорезультативним, тому цей підхід не буде розглянутий. Перспективними є повністю автоматичний і супервизорний способи управління. В останньому випадку оператор управляє крокуючої машиною, задаючи компоненти лінійної та кутової швидкостей руху корпуса, а рухи ніг автоматично обчислюються системою керування [10]. Так як останнім часом рівень автоматизації та інтелектуальних систем дозволяє будувати досить автономні і самостійні системи, а використання оператора в деяких випадках недоцільно, а іноді і неможливо, тому необхідно зробити акцент саме на автоматичних системах керування. 1 АКТУАЛЬНІСТЬ ТЕМИ РОБОТИ На даний момент все більше видів діяльності переходять від людської і керованої людиною праці до повністю автоматизованої. У заводських умовах, в масових виробництвах більшість роботи вже виконують роботи. Однак там, де рельєф місцевості або тип грунту не дозволяє використовувати автоматизовані установки, і там, де діяльність не може бути строго детермінована, шснуючі на даний момент робототехнічні засоби марні. Однією з головних проблем використання роботів поза заводських умов є нездатність колісної та гусеничної техніки пересуватися по ділянках складного рельєфу – переступати перешкоди і спиратися тільки на надійні точки грунту, уникаючи непридатні для цього ділянки [6]. За цим, розробка нових алгоритмів для адаптуємого крокуючого робота або шасі для техніки є актуальною науково-технічною задачею. При використанні крокуючого пересування здібності робота з подолання перешкод та можливості його застосування значно зростають. 2 МЕТА І ЗАДАЧІ Об’єктом дослідження є крокуючий робот або крокуюче шасі для техніки.
Таким чином, головною метою є розробка алгоритму, що забезпечує стабільне ходіння робота.
3 НАУКОВА НОВИЗНА Наукова новизна даної роботи полягає в тому, що переміщення кінцівок пропонується здійснювати в повністю автоматичному режимі, де оператор або керуюча програма задають тільки напрямок руху робота. Всі інші дії робить автоматична система керування.
4 ОГЛЯД ДОСЛІДЖЕНЬ І РОЗРОБОК У ході виконання аналізу літератури були виділені основні підходи до управління ходінням роботів. Їх умовно можна розділити на дві групи: роботи, які використовують статичні алгоритми та роботи, які використовують еволюційні алгоритми. Особливістю першої групи алгоритмів є те, що закладений в них механізм ходіння статичний і не змінюється в процесі роботи робота [5]. Одним з представників цієї групи є алгоритм, на основі якого побудований робот «RunBot». Детальний опис принципів роботи цього робота наведено нижче. Друга група алгоритмів управління відрізняється тим, що алгоритм залежить від навчання, і при зміні вхідних даних робот може бути довчити або перевчити [11]. Роботи, засновані на алгоритмах цього типу, представлені нижче. 4.1 Робот «RunBot» У роботі Тао Генга «Рефлексивні нейронні мережі для динамічного контролю двоногого ходіння» представлена розробка нового рефлексивного нейронного контролера, який був реалізований на двоногому роботі. Динамічно стійка двоногий хода з’являється в результаті комбінації нейронних та фізичних обчислень. Крокуючий робот спроектований з дуже малим набором вхідних сигналів і з контролером, який діє приблизними і автономним способом. Обидва аспекти можуть мати значення в біологічних системах також, тому що вони враховують набагато більш обмежену структуру нейронної мережі і зменшують складність необхідної обробки інформації [4]. В роботі контролер безпосередньо пов’язаний з двигунами робота, (його «м’язами»). Ці механізми дозволили вперше створити динамічно сталого штучного двоногого, що об’єднує фізичні обчислення з рефлексивним контролером. Рефлексивні контролери, такі як модель Круза, не застосовують центральний процесор, який вимагає інформацію про стан кожної кінцівки в реальному часі і обчислює глобальну траєкторію явно. Натомість локальні рефлекси кожної кінцівки запитують тільки дуже невелику інформацію щодо стану інших кінцівок. Скоординоване пересування з’являється з взаємодії між локальними рефлексами і землею [7]. Таким чином, така розподілена структура може значно зменшити обчислювальне навантаження на контролер пересування. З такими перевагами, рефлексивний контролер Круза і його варіанти були здійснені на деяких багатоногих роботах. У разі двоногих роботів деякі з них також використовують деяку форму рефлексивних механізмів, їх рефлекси зазвичай працюють в якості допоміжної функції або інфраструктурними одиницями для інших нерефлексівних або паралельних контролерів високого рівня. Наприклад, на моделюемому двуногом 3D роботі, спеціально призначені рефлексивні механізми використовувалися, щоб розв’язати два типи проблем контакту робота з земною поверхнею, ковзання та перекидання, в той час як висота стрибка робота, поступальна швидкість, і орієнтація тіла окремо управляються трьома звичайними контролерами. На реальному двуногом роботі, два попередньо зашитих рефлекса компенсують два різні типи проблем, пов’язаних з імпульсною і безперервною силою відповідно. До теперішнього часу не існувало жодного реального двоногого робота, який працював виключно на рефлексивних контролерах ходіння. Можливо, це пов’язано з нестійкістю, властивою двоногій ходьбі, яка робить контроль динамічної стабільності двоногих роботів набагато важчим, ніж многоногих роботів. Зрештою, в чистому вигляді контролер локальних рефлексів не містить механізмів, щоб гарантувати повну стабільність двоногого робота. У той час як зазвичай контролери двоногих крокуючих роботів вимагають безперервного зворотного зв’язку положення для обчислення траєкторії і контролю за стабільністю, швидке пересування деяких тварин в основному самостабілізіровано через пасивних, в’язкопружних властивостей їх скелетно-м’язової системи. Не дивно, деякі роботи можуть показати подібну власність самостабілізації. Пасивні двоногі роботи можуть спуститися з дрібного нахилу без сенсорів, контролю або рушіїв. Однак, у порівнянні з рухомими двоногими, у пасивних двоногих роботів є очевидні недоліки, наприклад, необхідність рухатися з нахилу і нездатність управляти швидкістю. Пасивні двоногі роботи зазвичай обладнуються круглими ногами, які можуть збільшити діапазон стабільності ход і можуть змусити виглядати рух ніг більш плавним. Натомість рухомі двоногі роботи, як правило, використовують плоскі стопи так, щоб їх щиколотки могли ефективно використовувати обертаючий момент, щоб просунути вперед робота в опорній фазі і полегшити контроль стабільності. Хоча робот, наведений у статті – рухомий двоногий, у нього немає рухомих гомілковостопних суглобів, це робить контроль стабільності ще більш важким, ніж в інших рухомих двоногих. Так як передбачалось використовувати пасивну динаміку робота під час деяких стадій його циклу ходи, так само як і у пасивного двоногого, його основа ноги також має криву форму з радіусом, рівним довжині ноги. Частини тулуба зібрані таким способом, при якому його центр маси розташований максимально попереду. Ефект цього рішення ілюстрований на малюнку 4.1. Як показано один крок включає дві стадії, перша від (A) до (B), друга від (B) до (C). Під час першої стадії робот повинен використовувати свій власний імпульс, щоб піднятися на стоячу ногу. Йдучи на низькій швидкості, у робота може бути недостатньо імпульсу, щоб зробити це. Так, дистанція, яку центр маси повинен подолати за цю стадію, повинна бути максимально короткою, наскільки можливо, це може бути виконано шляхом переміщення центру ваги тулуба вперед. На другій стадії робот просто падає вперед і ловить себе на наступному кроці. Потім цикл ходьби повторюється. Малюнок також ясно показує рух згину стоячої ноги. Фаза опори починається з дотику п’ятою землі і закінчується коли палець ноги відривається від землі. 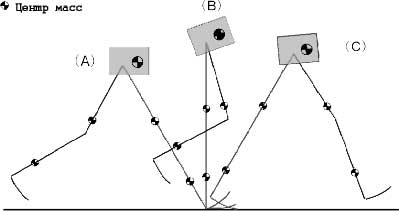 Рисунок 4.1 Ілюстрація кроку робота. 4.2 Еволюційні моделі руху крокуючих роботів 4.2.1 Основні принципи еволюційного підходу При створенні моделі руху крокуючих роботів структура програмного забезпечення складається з двох основних частин: генетичний або нейромережевий модуль, що відповідають за розрахунок траєкторій кінцівок і подальше навчання та модуль, який буде емулювати взаємодія з реальною середовищем [1]. Необхідність даного модуля обумовлена тим, що, при використанні еволюційних алгоритмів, навчання робота відбувається методом проб і помилок і якщо спочатку роботу алгоритму організувати на робочій фізичної моделі, то, по-перше, навчання даної системи займе дуже багато часу, тому що всі процеси будуть відбуватися в реальному часі, а по-друге, неминучим виявиться пошкодження цієї фізичної моделі у зв’язку з невірними варіантами передбачуваних рухів, які в даній моделі навчання неминучі [3]. 4.2.2 Робот «Dexter» Розглянемо варіант застосування технологій штучного інтелекту для моделювання рухів крокуючого робота, розроблений Міхаелем Палмером і описаним в роботі «An Evolved Neural Controller for Bipedal Walking: Transitioning from Simulator to Hardware». Параметри цієї моделі були налаштовані так, щоб відповідати моделі фактичного робота. Моделюєма версія робота зображена на малюнку. 4.2. З точки зору контролюючого програмного забезпечення модельований робот може бути представлений в підсумку як «чорний ящик» с 12 входами (12 сервоприводов) и 18 выходов (12 сервоприводов плюс 6 степеней свободы IMU). з 12 входами (12 сервоприводів) і 18 виходів (12 сервоприводов плюс 6 ступенів свободи IMU). Кожні 10 мілісекунд, диспетчер нейронної мережі обчислює новий набір 12 значень приводів; фізичний симулятор обчислює положення всіх частин робота для наступного тимчасового кроку. Завдання ходьби наступні: починаючи з фази балансу, необхідно, щоб робот зробив п’ять кроків, які призводять до повернення у вихідне положення. Робот повинен тоді повернутися до самобалансу, і залишитися стояти вертикально. Усе завдання ходьби, не включаючи балансують фази, 3,4 секунди довжиною. Область пошуку рухів всіх сервоприводов робота від старту до кінця руху є багатовимірною і дуже великою. Велика частина простору станів не буде мати схожість з людською ходою [8]. 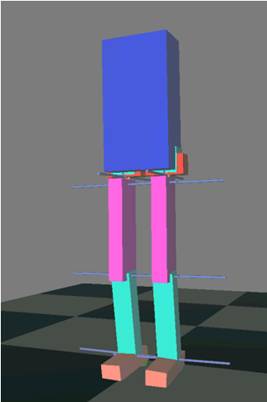 Рисунок 4.2 – Фізична модель робота Розробник обмежив пошук, надаючи набір цільових або «запропонованих» траєкторії трьох типів, параметризованих в часі, для того, щоб робот їм слідував. По-перше, був отриманий набір пропонованих траєкторій для кутів усіх суглобів. Цей набір був згенерований алгоритмічно за допомогою синус-заснованих генераторів, і нагадує основні людські цикли ходьби, в тому числі початкові півкроку від правої ноги, а потім три повних кроку вліво, вправо, вліво і останні півкроку правою ногою, в результаті чого робот повертається в вихідне положення. По-друге, була надана передбачувана траєкторія центру мас робота, що складається з фази прискорення, фази рівномірного переміщення, і фази уповільнення. Загальне бажане пересування центру мас складає приблизно 1,2 метра. Нарешті, обчислюється і бажана траєкторії повинні звести до мінімуму зміни по тангажу, крену і нишпоренню тулуба, необхідно щоб тулуб переміщувався плавно. Завершення всієї задачі вимагає, щоб контролюючі мережі декілька відхилилися від запропонованих траєкторій; якби робот повинен був би йти за запропонованими траєкторіями точно, він був би не в змозі балансувати. Завдання ходьби тривалістю 3,4 секунди було розділено на 34 тимчасових відрізка по 100 мілісекунд кожен. Фенотип одного еволюційного примірника складається з 22 окремих нейронних мереж. Кожна з цих мереж відповідає за управління роботом для одного або декількох з 34 часових зрізів (деякі мережі використовуються повторно для кількох часових відрізків). Крім того, є одна попередньо навчена мережа, яка відповідає за балансування тільки стоячи, ця мережа є ідентичною для всіх екземплярів і контролює робота на початку і в кінці ходьби, коли робот (в ідеалі) стоїть на місці і у вертикальному положенні. Щоб оцінити продуктивність даного набору нейронних мереж, запускається серія тестів з використанням мереж для контролю робота. Для кожного тесту, створюються трохи відмінні початкові умови для того, щоб симулятор не повторював свої попередні шляхи. Рандомізація полягає в застосуванні випадкового імпульсу сили робота, у випадковому напрямку, під час балансування, перш ніж він починає йти. Крім того, змінюємоється відстань між ногами, десь біля декількох сантиметрів. У деяких експериментах, ми змінюємо інші параметри, такі як коефіцієнт тертя поверхні. Під час кожного тесту модельованого робота опускають на землю, і включають попередньо навчену мережу балансування. Відводиться кілька секунд на те, щоб збалансувати робота. Потім відбувається перехід від фази балансування до ходьби. Кожна нейронна мережа має повний контроль над роботом протягом 100 мілісекунд. У прикордонних точках переходу між мережами, застосовується 50 мс період плавного переходу між мережами. Протягом цього перехідного періоду, ваги ребер нейромережі опускаються від 1,0 до 0,0, в потім ваги ребер наступної мережі плавно піднімаються з 0,0 до 1,0. Ця картина триває до кінця ходіння, і в цей момент ми переходимо назад до балансування мережі. Найбільш ранні спроби вирішення завдання приводили до того, що робот втрачав свій баланс до завершення циклу ходіння. (див. рис. 4.3, рядки 1 і 2). При еволюціонування системи, хромосоми в популяції почали поліпшуватися, середня популяція має можливість досягти завершення всієї задачі перед втратою балансу. (див. рис. 4.3, рядки 3, 4 і 5.) [9].  Рисунок 4.3. – Демонстрація поліпшення ходьби з плином часу 4.2.3 Робот «Морська зірка» Більшість існуючих роботів діють в умовах не змінного навколишнього середовища. У разі зміни середовища необхідно буде перенавчання до нового середовища. Робот «Морська зірка» (Starfish), має можливість вивчати свою власну будову і потім використовувати цю модель для пересування. Зовнішній вигляд робота зображений на малюнку 4.4.  Рисунок 4.4 – Робот «Морська зірка» Більшість роботів має фіксовану модель – програму, закладену при проектуванні. Даний робот має систему самомоделювання. Це робить його адаптивним. Він може виконувати завдання без заздалегідь заданого алгоритму. Даний робот може пристосуватися і продовжувати діяти після отримання ушкоджень. Відразу після включення модель робота практично не містить інформації. Перед ним поставлено завдання рухатися по прямій. Крім того, роботу відомий набір елементів, з яких він складається. За моторику відповідають 8 рухомих частин – по 2 на кожну кінцівку. З цього набору даних він випадковим чином будує різні комбінації припущень про те, як працюють закладені в нього механізми. Після чого надсилається сигнал на сервоприводи. За допомогою вбудованих сенсорів робот перевіряє отриманий результат. З 100 моделей першого покоління 90% визнаються непридатними, а решта допрацьовуються шляхом схрещування один з одним і заново проходять перевірку на ефективність в досягненні поставленої задачі. Після проходження 16 циклів, у кожному з яких будується по 200 поколінь віртуальних моделей «Морська зірка», отримує інформацію про свій устрій, і запам’ятовує обрану нею віртуальну модель. На основі цієї моделі робот намагається добитися такого режиму роботи, при якому поставлена мета буде досягнута і робот не отримає ушкоджень. У результаті робот виробляє цілком функціональну ходу. Найефективнішим варіантом на даний момент є спосіб, при якому робот спирається на «живіт», підтягує своє тіло, відштовхується «задніми» ногами і перевалюється. Після того як робот навчився пересуватися за допомогою чотирьох ніг, імітується аварія: робот відключається, прибирається одна нога і включається заново. Під час тестів машина обчислює, що пристосована раніше віртуальна модель для чотирьох ніг не відповідає реальним показаннями датчиків. В такому випадку робот виробляє новий алгоритм пересування відповідно до нової моделі [2]. 5 АНАЛІЗ ІСНУЮЧИХ МЕТОДІВ В результаті проведеного огляду літератури були виділені наступні підходи:
 Рисунок 4.5 – Зміна вектора сили, що діє на робота під час кроку (анімація: 7 кадрів, затримка між кадрами 0,5 сек, кількість циклів відтворення – 6, розмір – 53 кб)При розробці алгоритму управління крокуючого робота пропонується використовувати найкращі з особливостей описаних вище підходів. А саме відмовитися від використання шаблонів ходи і здійснювати паралельне управління всіма кінцівками одночасно. 6 ВИСНОВКИ В ході аналізу існуючих підходів, були обрані крокуючі механізми як найбільш перспективні і незалежні від умов середовища, рельєфу місцевості, покриття грунту. В області вивчення крокуючих механізмів існують дуже великі перспективи. Дана область є найменш вивченою, однак найбільш поширеною в живій природі, що становить значний інтерес для науки. При вивченні методів керування крокуючими механізмами було встановлено, що найбільш перспективними в галузі керування крокуючими механізмами є еволюційні алгоритми. Збільшує інтерес до їх вивчення і той факт, що вони мають пряму схожість з методами навчання ходіння в живій природі, а конструкції роботів часто збігаються по фізичній моделі з живими організмами, при цьому тварини домоглися величезних успіхів у переміщенні такими методами. Це дозволяє говорити про можливість запозичення методів навчання та різних механізмів і моделей руху з тваринного світу, також це дає можливість оцінити отримані результати, знаючи рівень можливого розвитку такого роду технології пересування. Примітка При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2012 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати. СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ
|
