Источник: http://citeseerx.ist.psu.edu
Рефлексивные нейронные сети для динамического контроля двуногого хождения
Тао Генг, Бернд Порр, Флорентин Ворготтер
Первод: Кишинский В.В.
Аннотация
Двуногая ходьба остается трудной проблемой, и модель робота может существенно облегчить понимание основных биомеханических принципов, а также их нейронного управления. Целью данного исследования является продемонстрировать, что стабильная двуногая ходьба может быть достигнута за счет физических свойств шагающего робота с использованием небольшой, рефлексивной нейронной сети, которая опирается в основном на локальные сигналы датчиков. Основываясь на более ранних работах (Тага, 1995;. Круз и др., 1998), это исследование показывает, что человекоподобная походка возникают без специального контроля положения или траектории и шагающий способен компенсировать малые возмущения за счет собственных динамических свойств. Рефлексивный контроллер, который здесь используется, имеет следующие характеристики, которые отличаются от прежних подходов: (1) Управление в основном локальное. Таким образом, она использует только два сигнала (AEA = предыдущий максимальный угол и GC = контакт с почвой), которые действуют на сложных суставах. Все остальные сигналы работают только в одинарных суставах. (2) Ни контроль за положением, ни контроль за траекторией не используются. Вместо этого приблизительная природа местных рефлексов на каждом суставе позволяет самой механике робота (например, ее пассивная динамика) способствовать относительно полному вычислению траектории походки. (3) схема устройства управления двигателем, используемая в местных рефлексах нашего робота, более прямая и имеет больше биологического правдоподобия, чем в других роботах, потому что выходные значения моторных нейронов в нашем рефлексивном контроллере непосредственно ведут к двигателям суставов, вместо того, чтобы работать указателями для контроля скорости или положения. Как следствие, нейронный контроллер и механика робота тесно объединены как нейронно-механическая система, и это исследование подчеркивает, что динамически устойчивая двуногая походка появляется результатом объединения нейронных и физических вычислений. Это продемонстрировано различными экспериментами хождения, с использованием реального робота, а так же анализом карты Пуанкаре, примененной на модели робота, чтобы оценить его стабильность.
1 Введение
Есть две отличных схемы координации ног, обсуждаемые в литературе по передвижению животных и по биологически подобной робототехнике, а именно, CPGs (Центральные шаблонные генераторы) и рефлексивные контроллеры. Было найдено, что двигательные нейроны (и следовательно ритмичные движения) у многих животных управляются центральной сетью межнейронов, которые составляют основные особенности двигательных шаблонов. Однако, сенсорные сигналы обратной связи также играют важную роль в таких системах управления, превращая стереотипный непостоянный образец в координируемый ритм естественного движения (Рив, 1999). Эти сети упоминались как CPGs. С другой стороны, Круз развил рефлексивную модель контроллера, чтобы понять управление передвижением медленно движущегося насекомого палочника (Carausius morosus). В его модели рефлексивные механизмы в каждой ноге создают цикл шага каждой ноги индивидуально. Для координации между ногами, в соответствии с наблюдениями у насекомых, он представил шесть механизмов, которые могут восстановить координацию в случае незначительных дисбалансов (Круз и др., 1998; Cruse и Warnecke, 1992).
В то время как нейронные системы, моделирующие CPGs или рефлексивные контроллеры явно, или неявно просчитывают шагающую походку, механика также "вычисляет" значительную часть шагающих движений (Льюис, 2001). Это называется физическим вычислением, а именно, используя физику системы, а не явным моделированием, для генерации глобальной траектории и управления. Один отличный пример физического вычисления в передвижении животных – "предварительное сгибание"; нелинейные, пассивные вязкоупругие свойства самой скелетно-мышечной системы (Браун и Леб, 1999). Из-за физической природы предварительно сгибания, система может быстро ответить на дисбаланс (Хан и др., 2000). Таким образом, у всех животных контроль движений разделен между нейронными и физическими вычислениями.
В текущей работе мы представляем нашу разработку нового рефлексивного нейронного контроллера, который был реализован на плоском двуногом роботе. Мы покажем, как динамически устойчивая двуногая походка появляется на нашем роботе в результате комбинации нейронных и физических вычислений. Некоторые проблемы, рассмотренные в этой работе, мы считаем, имеют отношение к пониманию биологически мотивированного управления ходьбой. Определенно мы покажем, что возможно спроектировать шагающего робота с очень малым набором входных сигналов и с контроллером, который действует приблизительным и автономным способом. Оба аспекта могут иметь значение в биологических системах также, потому что они учитывают намного более ограниченную структуру нейронной сети и уменьшают сложность необходимой обработки информации. Кроме того, в нашем роботе контроллер непосредственно связан с двигателями робота, (его "мышцами") приведенными к более реалистичной, рефлексивной двигательно-чувствительной связи, чем осуществленные в подобных подходах. Эти механизмы позволили нам впервые создать динамически устойчивого искусственного двуногого, объединяющего физическое вычисление с рефлексивным контроллером.
Экспериментальная часть этого исследования дополнена динамической моделью и оценкой ее стабильности, используя подход карты Пуанкаре. Моделирования робота были недавно раскритикованы, обосновывая это тем, что сложные системы, такие как шагающий робот, не могут быть полностью смоделированы из-за непредвиденных обстоятельств, не поддающихся контролю при разработке и в мире, в котором он будет использоваться. Это понятие, известное как ”проблема воплощения”, было обсуждено в большой степени в литературе робототехники в прошлых годах (Porrand W¨org¨otter, 2005; Ziemke, 2001). Эта проблема вновь появляется также и в нашем случае, где мы находим, что моделирование и анализ будут действительно соответствовать экспериментам и поднимать уверенность в разработке, даже не доходя до богатой деталями реальной системы.
Эта работа организована следующим образом. Сначала мы описываем механическую конструкцию нашего двуногого робота. Затем, мы представляем нашу нейронную модель рефлексивной сети для контроля ходьбы. Тогда мы демонстрируем результат нескольких экспериментов двуногого хождения, и применяем анализ карты Пуанкаре модели робота. Наконец, мы сравниваем наш рефлексивный контроллер с другими механизмами управления ходьбой.
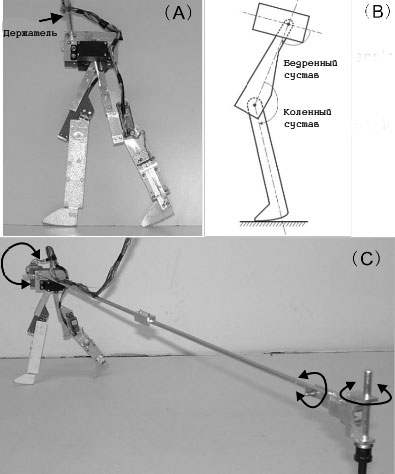
Рисунок 1 – А) робот Б) схема суставов одной ноги. C) структура держателя. Все его три ортогональные оси (тангаж, крен и рыскание) вращаются свободно, таким образом, не оказывая влияния на динамику робота в сагиттальной плоскости.
2 Робот
Рефлексивные контроллеры, такие как модель Круза не применяют центральный процессор, который требует информацию о состоянии в реальном времени каждой конечности и вычисляет глобальную траекторию явно. Вместо этого местные рефлексы каждой конечности запрашивают только очень небольшую информацию относительно состояния других конечностей. Скоординированное передвижение появляется из взаимодействия между местными рефлексами и землей. Таким образом, такая распределенная структура может очень уменьшить вычислительное бремя контроллера передвижения. С такими преимуществами, рефлексивный контроллер Круза и его варианты были осуществлены на некоторых многоногих роботах (Фэррелл, 1995). В случае двуногих роботов некоторые из них также используют некоторую форму рефлексивных механизмов, их рефлексы обычно работают вспомогательной функцией или инфраструктурными единицами для других нерефлексивных или параллельных контроллеров высокого уровня. Например, на моделируемом 3D двуногом роботе (Бун и Ходджинс, 1997), специально предназначенные рефлексивные механизмы использовались, чтобы ответить на два типа ошибок контакта с земной поверхностью робота, скольжение и опрокидывание, в то время как высота прыжка робота, поступательная скорость, и ориентация тела отдельно управляются тремя обычными контроллерами. На реальном двуногом роботе (Фунабаси и др., 2001), два предварительно зашитых рефлекса сделаны, чтобы компенсировать два различных типа нарушений, представляющих импульсную и непрерывную силу, соответственно. До настоящего времени не существовало ни одного реального двуногого робота, который зависел исключительно от рефлексивных контроллеров хождения. Возможно это из-за неустойчивости, свойственной двуногой ходьбе, которая делает динамическую стабильность двуногих роботов намного более трудную в управлении, чем многоногих роботов. В конце концов, сам чистый местный рефлексивный контроллер не содержит механизмов, чтобы гарантировать полную стабильность двуногого.
В то время как контроллеры двуногих шагающих роботов вообще требуют некоторой непрерывной обратной связи положения для вычисления траектории и контроля за стабильностью, быстрое передвижение некоторых животных в основном самостабилизировано из-за пассивных, вязкоупругих свойств их скелетно-мышечной системы (Full и Tu, 1990). Не удивительно, некоторые роботы могут показать подобную собственность самостабилизации (Iida и Pfeifer, 2004). Пассивные двуногие роботы могут спуститься с мелкого наклона без сенсоров, контроля или движителей. Однако, по сравнению с движимыми двуногими, у пассивных двуногих роботов есть очевидные недостатки, например, необходимость двигаться с наклона и неспособность управлять скоростью (Пратт, 2000). Некоторые исследователи предложили снабдить пассивного двуногого приводами, чтобы улучшить его работу. Ван дер Линд сделал возможным хождение двуногого пассивного робота на равнинной местности, вкачивая энергию в пассивный механизм на каждом шаге (Ван дер Линд, 1998).
Однако, никто еще не построил пассивного двуногого робота, у которого есть способности движимых роботов, такие как ходьба на различных скоростях на различных ландшафтах (Пратт, 2000).
Пассивные двуногие роботы обычно оборудуются круглыми ногами, которые могут увеличить диапазон стабильности устойчивых шагающих походок и могут заставить выглядеть движение ног более плавным. Вместо этого движимые двуногие роботы, как правило, используют плоские стопы так, чтобы их лодыжки могли эффективно использовать вращающий момент, чтобы продвинуть робота вперед в опорной фазе и облегчить контроль за стабильностью. Хотя наш робот – движимый двуногий, у него нет движимых голеностопных суставов, это делает контроль стабильности еще более трудным, чем у других движимых двуногих. Так как мы намеревались использовать пассивную динамику нашего робота во время некоторых стадий его цикла походки, так же как и у пассивного двуногого, его основание ноги также имеет кривую форму с радиусом, равным длине ноги.
Что касается механической конструкции нашего робота, он 23 см высотой от ног к бедрам. У него есть четыре сустава: левое бедро, правое бедро, левое колено и правое колено. Каждый сустав приводит в действие сервомотор. Жесткий механический ограничитель установлен на коленных суставах, таким образом препятствуя тому, чтобы коленный сустав был вывихнут, подобные функции выполняют коленные чашечки на ногах животных. Встроенные широтно-импульсные модуляторы цепи управления сервомоторов разъединены, в то время как встроенный потенциометр используется, чтобы измерить угол сгиба сустава. Его выходное напряжение посылается в компьютер через аналогово-цифровой преобразователь. Каждая нога оснащена модифицированным пьезо-датчиком (DN 0714071 от Farnell) чтобы чувствовать контакт с землей. Мы ограничиваем робота держателем. Все три измерения (крен, тангаж и рысканье курса) держателя могут вращаться свободно (см. рисунок 1 C), таким образом, не оказывая никакого влияния на динамику робота в сагиттальной плоскости. Обратите внимание на то, что робот не ограничен держателем в сагиттальной плоскости. Фактически, он всегда может ходить и падать.
Самое важное соображение в механической конструкции нашего робота – местоположение своего центра массы. Его связи сделаны из алюминиевого сплава, который легок и достаточно крепок. Двигатель каждого тазобедренного сустава – HS-475HB от Hitec. Он весит 40 г и может произвести вращающий момент до 5.5 кг/см. Из-за эффекта механической остановки, двигатель коленного сустава имеет меньший вращающий момент, чем тазобедренный сустав в фазах стояния, но должен вращаться быстро во время фазы перемещения для перемещения ноги. Мы используем PARK HPXF от Supertec на коленном суставе, который легок (19 г), но быстр – 21рад/с. Таким образом, приблизительно семьдесят процентов веса робота сконцентрированы на его туловище. Части туловища собраны таким способом, при котором его центр массы расположен максимально впереди. Эффект этого решения иллюстрирован в рисунке 2. Как показано один шаг включает две стадии, первая от (A) до (B), вторая от (B) до (C). Во время первой стадии робот должен использовать свой собственный импульс, чтобы подняться на стоящую ногу. Идя на низкой скорости, у робота может быть недостаточно импульса, чтобы сделать это. Так, дистанция, которую центр массы должен преодолеть за эту стадию, должна быть максимально короткой, насколько возможно, это может быть выполнено путем перемещения центра тяжести туловища вперед. На второй стадии робот просто падает вперед естественно и ловит себя на следующем положении ног (см. рисунок 2). Затем цикл ходьбы повторяется. Рисунок также ясно показывает движение сгиба стоящей ноги. Фаза опоры начинается с касания пяткой земли и заканчивается когда палец ноги отрывается от земли.
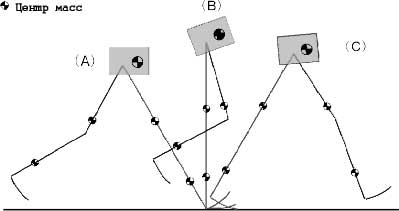
Рисунок 2 – Иллюстрация шага робота.