278 Электроника и связь. Тематический выпуск «Электроника и нанотехнологии», ч.2, 2009
Веса со, - это вероятности двух классов разделенных порогом t, а а2 - девиация этих
классов. Оцу показал, что минимизация девиации внутри класса это то же самое, что и максимизация девиации между классами:
4 (0 = а2 - а2 (0 = Ю1 (0а>2 (О Ь (0 " Ц2 (О]2 ,
которая выражается в терминах вероятности со,
и среднее арифметическое класса ц,, которое в
свою очередь может обновляться итеративно.
На основании данного подхода разработан алгоритм бинаризации изображений:
1. Вычислить гистограмму и вероятность для каждого уровня интенсивности.
2. Вычислить значения для г, и ц,-.
3. Для каждого значения порога от t = 1 до максимальной интенсивности:
1) обновляем со/ и ц/-
2) вычисляем a2(f);
3) если а больше чем имеющееся, то запоминаем а и значение порога.
4. Искомый порог соответствует максимуму
a2(f).
Оцу показал, что минимизация девиации внутри класса это тоже самое, что и максимизация девиации между классами [4]:
4 (0 = с2 - а2 (0 = Ю1 (f)co2(ОЬИ (0 " ^2С)]2 ■
2. Нахождение линий на изображении.
Один из подходов к выполнению подобных действий основан на преобразовании Хафа [А].
Имея некоторое множество точек изображения (обычно двоичного), предположим, что требуется найти подмножества этих точек, которые лежат на прямых линиях. Один возможный подход заключается в построении всевозможных прямых, задаваемых парами этих точек, а потом в обнаружении точек, которые расположены близко к конкретным прямым. Проблема реализации такой процедуры связана с необходимостью рассмотрения всех возможных прямых, а затем в выполнении операций сравнения всех точек с каждой из этих прямых. Вычислительная сложность такого решения позволяет применять его лишь в самых простых прикладных задачах.
Имея преобразование Хафа, возможен иной подход. В этом преобразовании используется параметрическое представление линий: р = xcos(8) + ysin(8)
Переменная р представляет собой расстояние от центра координат до линии вдоль вектора, перпендикулярного к линии. Параметр
8 представляет собой угол между осью х и этим вектором. Имея матрицу р и 8 можем
найти максимумы преобразования Хафа по следующему алгоритму:
1) найти ячейку преобразования Хафа, в которой лежит наибольшая величина, и записать ее местоположение;
2) обнулить ячейки в ближайшей окрестности положения, найденного на шаге 1;
3) повторять шаги 1 и 2 до тех пор, пока желаемое число максимумов не будет найдено или после достижения заданного порога.
Далее для каждого максимума следует найти положения всех ненулевых пикселов изображения, которые лежат на соответствующих прямых. После упорядочивания пикселов в сегменты линий оставить линии которые длиннее некоторой минимальной пороговой длинны a .
Опытным путем было установлено, что для целей распознавания дорожной разметки пороговая длинна при размере изображения 640х480 не составляет более a = 5 .
Для использования метода Хафа, разобьем изображение на верхнюю и нижнюю части, прямые линии будем искать в нижней части изображения, так как именно туда попали интересующие нас линии разметки. Результат нахожения линий методом Хафа в среде MATLAB показан на рисунке 1 (исходные размеры фреймов 360х240).

а

б
Рис 1. Нахождение линий:а – исходное изображение (разрешение изображения: 320х240); б – бинарное изображение с найденными линиями (разрешение изображения: 320х120)
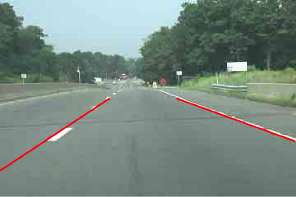
Далее производится процедура первоначального нахождения линий разметки: находятся две линии угол между которыми лежит в пределах от 25° до 50°и обе эти линии имеют угол пересечения с горизонталью от -25° до 25°.
Результат нахождения линий в среде MATLAB разметки представлен на рисунке 2.

 –
–