Оригинал статьи
УДК 551.46.077:629.584
МОДЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ
АВТОМАТИЧЕСКОЙ ИНСПЕКЦИИ ПОДВОДНЫХ
ТРУБОПРОВОДОВ С ПОМОЩЬЮ
ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА
А.В. Багницкий, А.В. Инзарцев, ИПМТ ДВО РАН, г. Владивосток1
А.М. Павин
С.В. Мельман, М.А. Морозов
ИАПУ ДВО РАН, г. Владивосток2
Рассматриваются вопросы применения гидролокатора бокового обзора (ГБО) для инспекции подводных коммуникаций (трубопроводов). В качестве носителя ГБО выступает автономный необитаемый подводный аппарат. Решаются задачи обработки эхограмм ГБО для детектирования протяженного объекта на фоне морского дна, определения его местоположения и использования этой информации для организации движения АНПА вдоль трубопровода. Обсуждаются результаты моделирования процесса отслеживания трубопроводов с использованием ГБО.
ВВЕДЕНИЕ
Применение автономных необитаемых подводных аппаратов (АНПА) при выполнении подводных работ во многих случаях позволяет экономить значительные ресурсы. Показательным примером является проведение инспекции подводных коммуникационных линий большой протяженности (подводных кабелей и трубопроводов) [1, 2]. Использование для этих целей привязных телеуправляемых аппаратов часто ограничено их небольшим радиусом действия и связано с необходимостью применения специально оснащенного надводного обеспечивающего судна, что ведет к увеличению стоимости инспекционных работ. В свою очередь, применение АНПА в качестве носителя аппаратуры, регистрирующей состояние искусственного протяженного объекта, позволяет в сжатые сроки произвести обследование всей трассы прокладки подводных коммуникаций.
Для решения задач инспекции АНПА должен быть оборудован надежными средствами идентификации протяженного объекта. К таким средствам обычно относят оптические, электромагнитные и акустические бортовые сенсоры АНПА [3, 4]. Также применяется совместная обработка данных от этих систем для организации управления АНПА [5]. В задачи инспекции входит сбор данных о состоянии как самого протяженного объекта, так и его окрестности (обследование донной поверхности, обнаружение посторонних предметов и т.д.). Одним из средств инспекции протяженных объектов является гидролокатор бокового обзора (ГБО), который обладает высокой разрешающей способностью, большим радиусом действия и позволяет оценить состояние коммуникационных линий и примыкающей донной поверхности. Кроме того, данное устройство может быть использовано для организации движения подводного аппарата
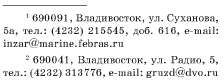
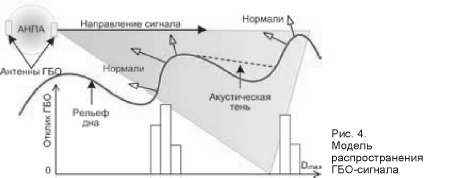
вдоль коммуникации. Для этого необходима обработка снимков гидролокатора на борту АНПА в режиме реального времени [1] с целью определения взаимной ориентации и положения робота и инспектируемого объекта. При перемещении антенны гидролокатора формируется акустическое изображение дна по обоим бортам АНПА. На рис. 1 показан фрагмент эхограммы ГБО правого борта с изображением трубопровода. Действие гидролокатора основано на периодическом излучении зондирующих звуковых посылок [4] и детектировании эхо-сигналов обратного рассеивания от удаленных участков дна. Таким образом, номер элемента в строке эхограммы ГБО служит показателем удаленности данной точки от АНПА. Дальность до объектов рассчитывается как половина пройденного


 и горизонтальный 0,9
и горизонтальный 0,9 . В качестве сенсора гидролокатора используется окно размером 120×8000 пикселей. Размеры окна влияют на разрешающую способность ГБО по дальности. Серия отражений звукового сигнала ГБО от препятствий получается на основе гистограммы интенсивности откликов, ранжированных по дальности.
. В качестве сенсора гидролокатора используется окно размером 120×8000 пикселей. Размеры окна влияют на разрешающую способность ГБО по дальности. Серия отражений звукового сигнала ГБО от препятствий получается на основе гистограммы интенсивности откликов, ранжированных по дальности.
 попадающих в соответствующий диапазон расстояний от источника
попадающих в соответствующий диапазон расстояний от источника
 – размер стро-
– размер стро-
 .
.


 (определяет перепад высот рельефа для каждого уровня);
(определяет перепад высот рельефа для каждого уровня); – частота искажений ландшафта уровня n (определяет количество искажений на единицу площади);
– частота искажений ландшафта уровня n (определяет количество искажений на единицу площади); – характер искажений ландшафта уровня n («твер-
– характер искажений ландшафта уровня n («твер-

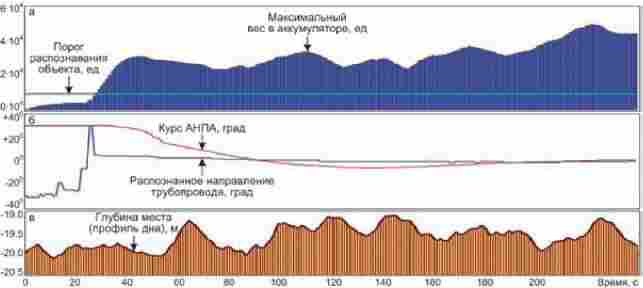
 и местоположения [x; y] распознанного объекта, а также координат подводного аппарата в текущий момент времени
и местоположения [x; y] распознанного объекта, а также координат подводного аппарата в текущий момент времени


 – целевой курс АНПА;
– целевой курс АНПА; – направление, определенное на основе обработки сигнала ГБО (распознанное направление линии); sat() – функция насыщения;
– направление, определенное на основе обработки сигнала ГБО (распознанное направление линии); sat() – функция насыщения; 
 –
– – минимально необходимый вес в накопите-
– минимально необходимый вес в накопите-
 – угол пере-
– угол пере-
 указывает на север, и ее увеличение соответствует вращению по часовой стрелке.
указывает на север, и ее увеличение соответствует вращению по часовой стрелке. , что обеспечивало пересечение трубопровода правым бортом под
, что обеспечивало пересечение трубопровода правым бортом под