
Abstract
Content
- Introduction
- 1. Relevance of the topic
- 2. The purpoce and objective of the study, expected results
- 3. Review of research and development
- 3.1 Review of sources on the topic
- 3.2 Current results
- Conclusion
- References
Introduction
State of the art machinery, the widespread introduction of automatic control systems and computing technology have changed the balance of priorities in the analysis of factors influencing the efficiency of production processes. One of the significant factor is increasing the efficiency of maintenance and repair (of works on TOP) as a quality service, performed a special service TOR, reduces downtime due to failure.
By definition, system maintenance and repair even the implementation of the simplest strategies for maintenance and repair may be considered as the control system technical condition. Such a representation of TOR alone justified the application of modern strategies involving the use of the planning work for the maintenance and repair of hardware diagnostics.
1. Relevance of the topic
Most of the works devoted to the analysis and synthesis systems TOR are focusing on reliability characteristics (probability of failure-free operation, the failure rate, the probability of human error, etc.). Even when analyzing systems in terms of the TOP accounting education and training of staff is still determining the above characteristics remain.
All of the processes occurring in the TOR, as in a closed SUTS, characterized by certain static and dynamic properties, which in terms of control theory reflect the dynamics of the recovery process, training of staff and dynamic properties as the human operator, the reliability and efficiency of the TSD.
Accounting for these factors, in particular, professional maintenance staff characteristics, will allow a more grounded plan the TOR (in the framework of the strategy) and thereby increase the efficiency of the system.
2. The purpose and objectives of the study, expected results
The aim is to increase the effectiveness of the management of complex technical state of objects by taking into account the characteristics of professional maintenance personnel in the form of the dynamic parameters of control devices.
To achieve this goal it is necessary to solve the following Adachi:
- To provide system maintenance and repair in the form of technical
state of the control system;
- To investigate the dynamics of the controlled object loss-recovery
efficiency;
- An analysis of maintenance personnel as a control device;
- To investigate the dynamics of the control system technical condition.
Object. The control system technical condition.
Subject. The dynamics of the processes of loss and disaster recovery.
Testing results. Materials paper were presented at the III International Scientific Conference of Young Scientists "Modern Information Ukraine: computer science, economics, philosophy."
3. Review of research and development
Because of maintenance and repairs are an important part of
manufacturing processes, the problem of restoration of efficiency,
eliminate failure and implementation of complex measures aimed at
maintaining specific conditions of quality indicators (eg, reliability)
of equipment at a level prescribed in the regulatory documentation have
been widely investigated as American, European, I and domestic experts.
In papers Yagovkina AI considers issues such as
increasing the life of the units to replace the parts in actual use,
practical techniques for assessing changes in the technical condition
of machines and advice on high-quality repair units with minimal cost
and downtime of machines to be repaired.
At the organization of maintenance and repair industrial energy management energy services since 1976 enjoyed "The system of preventive maintenance of electrical equipment industry."
System TOP EO not only in the modern concepts of the theory, science and practice of repair and restoration of productive fixed assets, machinery and equipment industries, but also provides specific recommendations, standards and guidelines for organizing and conducting maintenance primarily as the most efficient and economical impact of maintenance . This allowed to review and change the length and structure of the energy management equipment repair cycles in the direction of tightening, ie, the duration of the repair cycle, enlarge, reduce the number of repairs. From the structure of the repair cycle, in some cases eliminated overhaul, for some types of equipment repair is replaced by the average repair. For other types of energy management equipment is stipulated that the use of repair requires a feasibility study, changes in the length and structure of the maintenance cycle are made so that they do not conflict with the relevant recommendations, standards and rules of technical operation and safety.
The submission rules and guidelines have sought to maximize the integration of the various provisions, regulations and rules of government oversight and inspection of the agreement terms of repair, the structure and length of cycle maintenance and repair, the amount of repair work, coordination of control and test papers of various types of repairs, timing verification and timing of repair.
3.1 Review of sources on the topic
After analyzing the global and domestic literature related to the maintenance and troubleshooting of complex technical objects must be noted that it is first necessary to determine the form of maintenance equipment used methods of nondestructive testing and technical diagnostics, as well as software and hardware, which are constructed on the basis of methods and techniques for the accurate diagnosis of the objects. Special attention should be paid attention to the works of ideologues BALTECH, which systematize the approaches to the diagnosis, maintenance and technical operation of complex objects. Unfortunately, in most scientific literature is considered reliable at lower levels throughout the multidimensional system of technical objects from methods of technical diagnostics, which alone do not bring the desired results even with the development of new advanced techniques. As in the medical and technical diagnostics in the first place according to the author should be preventive measures. Figuratively speaking: "What we did not diagnose a person (object), his condition did not improve."
Consideration of TOR as SUTS determines necessary to ascertain the main tasks of maintenance and repair of complex objects.
1.1 The concept of a complex object
Under a complex object is meant an object that has the following
characteristics [1, 2]:
- The integrity of the performance of a single
task set before the object with a certain efficiency;
- Multi-dimensionality;
- Different physical nature, the dynamic properties and the reliability
of individual functional design elements that make up the object;
- Presence in the object of various overlapping forward and backward
linkages that lead to the fact that none of its elements does not
operate independently;
- The statistical nature of the control signals, external disturbances
and loads;
- The presence of the competing parties (eg, control signals, on the
one hand, and organized and uno
The worst features of these manifest themselves in the mechanisms, machines and units equipped with automatic systems and facilities management (regulation), implementing a set of functional behaviors, technologically connected with the corresponding auxiliary equipment and working in different modes at sufficiently strong external perturbations.
.
Maintenance and repair of complex objects involved in specialized services, which represent a system of maintenance and repair systems (TOR)
System maintenance and repair of equipment is a complex of interrelated provisions and rules governing the organization and procedures for maintenance and repair of equipment for the given operating conditions to ensure the quality specified in regulatory documents [3].
3.1 Current results
Currently, the system uses two technical maintenance of buildings and structures as a set of interrelated organizational and technical measures to establish the technical condition of equipment, the preventive measures and repair of structures and equipment, carried out in strict deadlines to ensure the safety and serviceability, preventing premature wear and prevention of emergency situations.
Considering the equipment as a dynamic system (a dynamic object management), in [2, 3, 4] indicates that the failure object to transition from one state to another technical accompanied by a transient whose duration depends on the type of violation and the dynamic properties of the object. The dynamic nature of the process is, and disaster recovery [5]. Thus, considering the process of disaster recovery as a process of stabilization, it can be argued that the transient loss and recovery efficiency for single failure in the general case have the form shown in Figure 1, where g (t) - setting technical condition.
It is obvious that the nature and quality of transients loss and disaster recovery will be determined by the structure and dynamic properties of the object and the control device (the device stabilization). It is therefore legitimate to study the dynamics formulation of the problem of managing the technical condition of equipment using the methods adopted in the theory of control of dynamic objects.

Figure 1 - Graphs of transient loss and recovery
performance with a sudden (a) and gradual (b) failure
2 Structure
of the research object
In the most general case management process
can be divided into three phases:
- To monitor the initial state of an object or behavior;
- The formation and implementation of targeting an object;
- Monitoring the results of management.
It is clear that in each case, these phases will be
characterized by features inherent to a particular management system.
These features will be reflected in the quality and quantity of the
controlled variables, the algorithms of information processing and the
formation of the control actions, etc., that is, will determine the
functional organization of the system [6]. In turn, the impact on the
functional organization of system elements and their distribution in
time and space, that is, the system will determine the formation of
structure [7].
For the analysis of the first phase of the management process, considered in this paper, we divide the entire space of possible technical state of the object Q in the following four areas: Q1 - functional object; Q2 - the object is not operational; Q3 - the object is functioning properly; Q4 - the object is functioning properly. In addition, for multi-object diagnostics in [8] is recommended to enter another area: Q5 - the object is not functioning. In this case it is assumed that the technical state of the object Q4 fails to perform any one of its functions, and in a technical state of the object Q5 does not perform any of its functions.
The relationships between these areas are as follows:
Given the accepted notions of "efficiency (inefficiency)" and "correct (incorrect) operation" [9], the remaining relations can be expressed as the following statements: I1: «The facility is operational and functioning properly»; I2: «The facility is not operational, but is functioning correctly" ; I3: «The object is not functioning properly»; I4: «The object is not functioning."
Define how these statements can be made by man. To do this, as an example, consider the control of technical condition of the motor. Watching him work, the person creates their observations like this [10]: "The engine is not in motion," "At rated load the motor is rotating at a frequency of less than par," "The engine hums and develops very low torque," " There is even a general overheating of the stator windings, "" Increased engine vibration ", etc.
By analyzing these examples, note the following. First, all human utterances are formulated with respect to objective or subjective indicators of g (t) Î G, characterizing the efficiency of the object to its destination (performance indicators [11]). Second, for all the performance indicators as objective or subjective set of acceptable change. Out of any of the indicators of the boundaries of "their" subject to valid values accepted as a fact that the object of a technical condition to another. Third, the evaluation of performance shall be based on control and disturbances.
The set of values of performance indicators divide G into two subsets G1 and G2, and G2 Ì G1. If g (t) Ï G1, then there is a failure of the object, which must be eliminated as a result of the regime, "Fault." If g (t) Î G1, but g (t) Ï G2, then this ratio characterizes the degree of development of a primary defect in which a high probability of failure, and thus necessitates the implementation of the regime "Prevention."
Comparing the above structure SUTS, we can conclude that in this system there are two observers of the technical condition of equipment:
- "Observer 1" - operational personnel involved in process control equipment, which controls its technical condition in various modes, thus fixing the fact of refusal (ie fixing the situation where g (t) Ï G1), and signals the need to implement the regime, "Troubleshooting failure ";
- "Observer 2" - senior staff (management) service TOR, directly or indirectly controls the behavior of the technical condition of equipment (ie monitors the situation where g (t) Î G2) and forming a plan for implementing the regime 'Prevention', which aims to avoid a situation where g (t) Ï G2, and especially the situation where g (t) Ï G1.
Thus, the first phase of the management of the technical condition can be expressed as an appropriate system of control block diagram is shown in Figure 2.
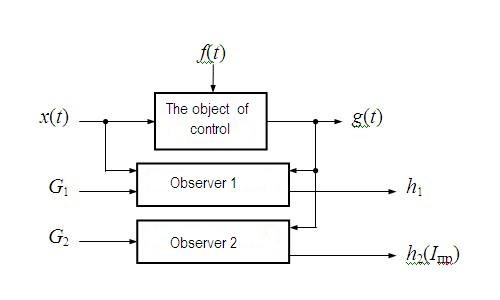
Figure 2 is indicated: x (t) - «process» Management; f (t) - the disturbance, causing changes in the technical state of the object; h1 - a signal that activates the mode "Fault»; h2 (Ipr) - a signal that activates the mode " Prevention ', containing information about the elements of an object subject to adjustment, replacement or repair (Ipr).
We now consider the control system technical condition, equipped with built-in automatic or portable automated technical means of diagnosis (TSD). We assume that the technical means used in the diagnosis provided by one mapping of D defects in a variety of diagnostic features of b (t) Î B. In addition, a set of diagnostic features are marked as B two subsets B1 and B2, similar (within the meaning of) subsets of G1 and G2 . If b (t) Ï B1, then the regime of "Fault", and if b (t) Î B1, but the b (t) Ï B2, then the regime of "Prevention."
With that said control system block diagram of the technical state with built-in automatic TSD will take the form shown in Figure 3, and using portable automated TSD - in Figure 4, where Yk (t) - the set of controlled variables of the object required for the formation of diagnostic features; Id - information about the cause of failure (defect indication) Ip - information used by the guidance of TOR for planning work in the "Prevention."
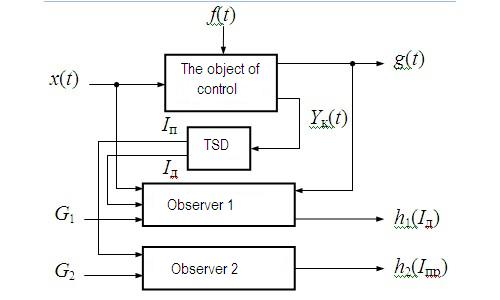
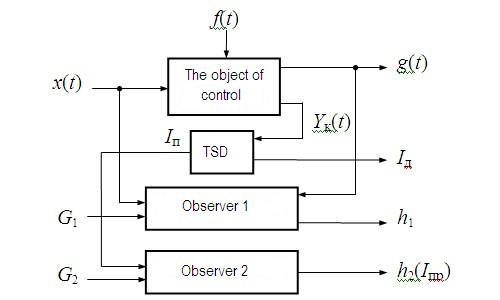
Figure 4 - Block diagram of a control system with portable TSD
1) a purposeful action (direct control) shall mean the restoration of health, that is, from the initial translation of the object (or close to inoperable inoperable) state to the final (usable) state;
2) recovery efficiency (direct control) by maintenance personnel that can be considered as a control device (the device stability, the regulator);
3) because the object of study is just the recovery process, we will assume that at the start of the maintenance staff has information on the performance of any element of the object must be restored.
Therefore, the block diagram of the object of study is as shown in Figure 5, where s (t) - an output variable that contains information about the technical condition of the restored object (or its functional and structural component); u (t) - the control action.
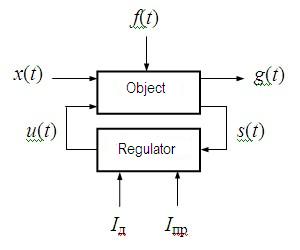
Figure 5 - Block diagram of the research object
Note that the third phase control is performed during the second phase by monitoring the variable s (t).
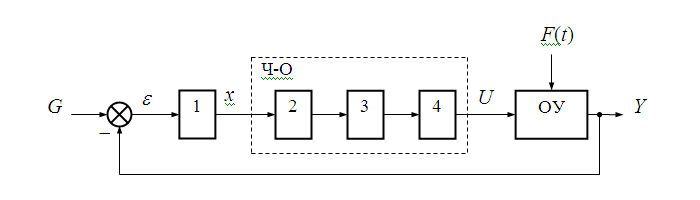
From the perspective of the dynamics of governance closest model of the sensorimotor activity of the person is a discrete model. Figure 22 shows a generalized block diagram of the control system ergatic (ESA), which is indicated: 1 - indicator device 2 - switching element 3 - forming a chain (extrapolator), 4 - the continuous linear link.
Conclusion
Introduction of systems maintenance and repair in the form of technical state of the control system, in particular the stabilization of the output variable of the object can be applied to the study of the TOP of the theory of automatic control.
Description of complex objects using the corresponding block diagram
can be considered failures of individual elements as parametric
perturbations.
References
-
ГОСТ 18322-78. Система технического обслуживания и ремонта техники. Термины и определения. -
Скляревич А.Н. Линейные системы с возможными нарушениями. – М.: Наука, 1975. – 352 с. - Скляревич А.Н., Скляревич Ф.А. Линейные системы с возможными изменениями. – Рига: Зинатне, 1985. – 296 с.
- Склярвич А.Н., Скляревич Ф.К. Вероятностные модели объектов с возможными изменениями. – Рига: Зинатне, 1989. – 366 с.
- Байхельт Ф., Франкен П. Надежность и техническое обслуживание. Математический подход. – М.: Радио и связь, 1988. – 392 с.
- Сетров М.И. Основы функциональной теории организации. – М.: Наука, 1972. – 164 с.
-
Николаев В.И., Брук В.М. Системотехника: методы и приложения. – Л.: Машиностроение, 1985. – 199 с. - Воронин В.В. Множество возможных дефектов и виды технических состояний // Приборы и системы. Управление. Контроль. Диагностика. – 2002. – № 6. – С. 41-44.
- ГОСТ 27.002-83. Надежность в технике. Термины и определения.
-
Гемке Р.Г. Неисправности электрических машин. – М.: Энергоатомиздат, 1989. – 336 с. -
Надежность и эффективность в технике: Справочник в 10-ти кн. / Кн. 8: Эксплуатация и ремонт / Под ред. В.И. Кузнецова и Е.Ю. Барзиловича. – М.: Машиностроение, 1990. – 320 с. Солодовников В.В., Бирюков В.Ф., Тумаркин В.И. Принцип сложности в теории управления. – М.: Наука, 1977. – 344 с. Солодовников В.В., Тумаркин В.И. Теория сложности и проектирование систем управления. – М.: Наука, 1980. – 162 с. Федосов Е.А., Себряков Г.Г. Спектральный анализ систем управления со случайно изменяющимися параметрами // Автоматическое управление и вычислительная техника: Сб. статей, вып. 8. – М.: Машиностроение, 1968. – С. 208-238. Гимельшейн Л.Я. Техническое обслуживание и ремонт подземного оборудования. – М.: Недра, 1984. – 221 с. -
Маньшин Г.Г. Управление режимами профилактик сложных систем. – Минск: Наука и техника, 1976. – 255 с. -
Венда В.Ф. Инженерная психология и синтез систем отображения информации. – М.: Машиностроение, 1975. – 396 с. - Губинский А.И., Кобзев В.В. Оценка надежности деятельности человека-оператора в системах управления. – М.: Машиностроение, 1974. – 52 с.
- Суходольский Г.В. Структурно-алгоритмический анализ и синтез деятельности. – Л.: Изд-во ЛГУ, 1976. – 120 с.
Зараковский Г.М., Павлов В.В. Закономерности функционирования эргатических систем. – М.: Радио и связь, 1987. – 232 с. -
Цибулевский И.Е. Человек как звено следящей системы. – М.: Наука, 1981. – 288 с. - Ронжин О.В. Информационные методы исследования эргатических систем. – М.: Энергия, 1976. – 208 с.
- Фролов К.В. Уменьшение амплитуды колебаний резонансных систем путем управляемого изменения параметров // Машиноведение. – 1965. – № 3. – С. 25-30.
Александров А.Г. Оптимальные и адаптивные системы. – М.: Высшая школа, 1989. – 263 с. - Моделирование динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.ee.unb.ca/jtaylor/Publications/m2sabi.pdf
- Имитационное моделирование сложных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.exponenta.ru/soft/others/mvs/ds_sim.asp
- Устойчивость движений дискретных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://195.19.227.46:8080/innov15/reports/Alex_shtx.pdf
- Стабілізація динамічних систем імпульсним і гібридним керуванням [Электронный ресурс]. – Точка доступа: URL: http://www.lib.ua-ru.net/diss/cont/338512.html
- Динамическиее системы [Электронный ресурс]. – Точка доступа: URL: http://www.maikonline.com/maik/index.do