Исследование динамики системы управления техническим состоянием оборудования
Авторы: В. А. Резников, Е. М. Сорокина
Описание: Статья опубликованная в журнале "Искусственный интеллект", 15 марта 2012 г., ДонНТУ, Донецк. В статье предложено рассматривать систему управления технического состояния, как систему автоматического управления. Сформирована структура служба технического обслуживания и ремонта, как управляющей подсистемы.
Источник: Журнал "Искусственый интеллект"
УДК
658.3
В.А. Резников, Е. М. Сорокина
Институт Информатики и Искусственного Интеллекта, ДонНТУ, г. Донецк.
Предложено
рассматривать систему управления
технического состояния, как систему автоматического управления.
Сформирована
структура
служба технического
обслуживания
и ремонта, как управляющей подсистемы.
Постановка
задачи
Эффективность
использования оборудования по назначению
оценивается с помощью соответствующих объективных или субъективных
показателей
(называемых показателями эффективности [1]), которые наблюдаются либо
непосредственно персоналом, либо специальными техническими средствами.
Дефекты,
возникающие в оборудовании в процессе его эксплуатации, приводят к
изменениям
параметров работоспособности, и, как следствие, к отклонениям
показателей
эффективности от значений, установленных нормативно-технической
документацией.
В зависимости от величины указанных отклонений фиксируются отказ
объекта или
его предаварийное (предотказное) техническое состояние, и тем самым
определяются работы по устранению уже свершившихся отказов или
различные
профилактические обслуживания и ремонты, направленные на предотвращение
появления отказов при использовании оборудования по назначению. Все эти
работы
осуществляет служба технического обслуживания и ремонта (служба ТОР).
Причем,
как в первом, та и во втором случаях задача службы ТОР фактически
заключается в
устранении указанных отклонений, то есть в
«возврате» показателей эффективности
в пределы установленных на них допусков.
Следовательно,
служба ТОР может рассматриваться как
система управления техническим состоянием оборудования (СУТС), задача
которой,
по определению [2], заключается в стабилизации множества параметров
работоспособности на уровне, предусмотренном нормативно-технической
документацией, в течение всего периода использования оборудования по
назначению
за счет целенаправленных действий человека (группы людей) и орудий
труда, то
есть путем управления. Причем, особенность этой системы управления
заключается
в том, что здесь управляемыми переменными являются внутрисистемные
свойства
машин и механизмов, поддержание которых на требуемом уровне
обеспечивает
эффективное использование оборудования по назначению.
В
то же время, рассматривая оборудование как
динамическую систему (динамический объект управления), в работе [3]
указывается, что при отказах переход объекта из одного технического
состояния в
другое сопровождается переходным процессом, длительность которого
зависит от
вида нарушения и динамических свойств объекта. Понятно, что
динамический
характер носит и процесс восстановления работоспособности. Тем самым
имеются
основания для исследования системы управления техническим состоянием
оборудования, как системы стабилизации, с помощью методов, принятых в
теории
автоматического управления.
В
данной работе основное внимание уделено формированию
структурных схем системы управления техническим состоянием оборудования
как
системы автоматической стабилизации показателей эффективности на
заданном уровне.
Структура
объекта технического обслуживания
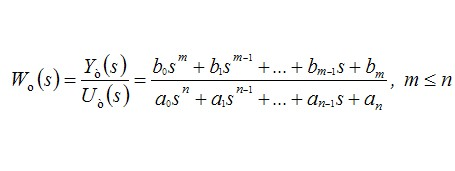
В соответствии с принятым подходом будем полагать, что объект технического обслуживания в общем случае описывается передаточной функцией вида:
 (1)
(1)
где
Yт(s) – выходная (управляемая) технологическая
переменная объекта; Uт(s) – управляющее воздействие,
предусмотренное технологией
работы объекта.
Дефектами
объекта, по определению [4], являются выходы
его собственных (структурных) параметров за пределы установленных на
них
допусков. В рамках модели (1) это означает изменения коэффициентов b0,
..., bm
и a0, ..., an. При известном характере изменения управляющего
воздействия Uт(s)
указанные изменения коэффициентов модели (1), естественно, обусловят
изменения
как самой выходной переменной
Yт(s), так
и её характеристик (например, показателей качества переходного
процесса), то
есть, в конечном итоге, показателей эффективности использования объекта
по
назначению.
В то же время известно, что динамический объект, описываемый передаточной функцией общего вида (1), можно представить в виде соответствующей структурной схемы. Например, пусть некоторый объект описывается передаточной функцией
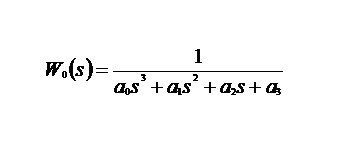 (2)
(2)
В результате проведения необходимых преобразований получим, что данный объект можно представить в виде структурной схемы, показанной на рисунке 1. Такое структурное представление математической модели (2) позволяет считать, что в восстанавливаемом объекте параметры а0, а1, а2 и а3 «отображают» соответствующие функционально-конструктивные элементы А-0, А-1, А-2 и А-3. В таком случае выход значений указанных параметров за пределы установленных на них допусков (то есть дефект) можно отождествлять с отказом соответствующего функционально-конструктивного элемента. Например, изменения параметра а3 можно сформулировать в виде следующего дефекта: «Отказ элемента А-3».
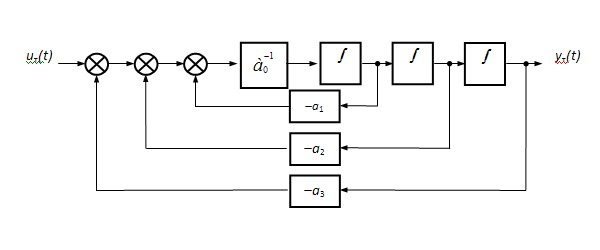
Рисунок
1 – Структурная схема объекта технического обслуживания
Такое
структурное представление объекта технического
обслуживания (объекта управления, объекта стабилизации технического
состояния)
дает возможность провести дальнейшие преобразования, заключающиеся в
следующем.
 (3)
(3)
Это, в свою очередь, позволяет представить объект управления, в котором имеют место одиночные дефекты, в виде структурной схемы, показанной на рисунке 2:

Рисунок
2 – Преобразованная структурная схема объекта управления
Отметим
также, что такие структурные представления
объекта управления позволяют исследовать системы управления техническим
состоянием объектов любой сложности, если под таковой понимать
структурную
сложность, которая определяется порядком передаточной функции [5].
Структура управляющего устройства
Из анализа объекта технического обслуживания следует, что с точки зрения управления его можно рассматривать как динамический объект с параметрическим возмущением. В работе [6] указывается, что при параметрических возмущениях и существенных ограничениях амплитудного и временного характера, наложенных на управляющее воздействие, наиболее эффективным способом стабилизации является целенаправленное изменение этих же или других параметров объекта. Другими словами, управление в таких случаях должно также носить параметрический характер. Обычно под параметрическим управлением понимают адаптивное управление [7], при котором целенаправленному изменению подвергаются параметры базового управляющего устройства. В данном же случае целенаправленному параметрическому воздействию (то есть параметрическому управлению) подвергается непосредственно объект, что предопределяет соответствующую структурную схему системы стабилизации при отказе i-го элемента (рисунок 3).
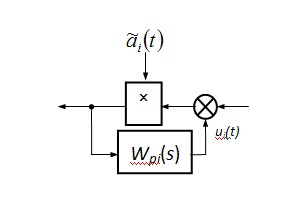
Рисунок 3 – Структурная схема системы стабилизации при отказе i-го элемента
Каждый
отдельный объект с параметрическими
возмущениями можно представить как множество объектов. Например, если
объект
описывается моделью (1), то при m = 0 имеем N = (0, 1, ..., n)
объектов,
структурные схемы которых имеют вид, показанный на рисунке 2. В то же
время,
принцип адаптации, по сути, заключается в том, что в результате
самонастройки
параметров базового регулятора формируется множество неадаптивных
регуляторов,
каждый из которых предназначен для стабилизации показателей качества
«своего»
i-го объекта (см. рисунок 3).
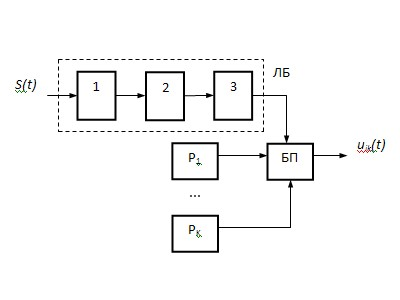
С другой стороны службу ТОР, как некоторое организационно-структурное подразделение предприятия, можно представить в таком упрощенном виде: руководитель + ремонтный персонал. Задача руководителя заключается в определении технического состояния объекта и направлении «соответствующего» ремонтника на устранение причины изменения технического состояния. Задача же каждого ремонтника заключается в непосредственном устранении причины изменения технического состояния объекта. Следовательно, на языке понятий, принятых в теории автоматического управления, службу ТОР можно рассматривать как управляющее устройство, состоящее из логического блока (руководитель) и множества регуляторов (ремонтники), то есть как управляющее устройство, сформированное по принципу структурной адаптации [8] и имеющее структуру, показанную на рисунке 4, где обозначено: ЛБ – логический блок; S(t) – множество входных переменных, содержащих информацию о техническом состоянии объекта управления; 1 – идентификатор, предназначенный для определения причины отказа объекта (идентификации отказавшего элемента объекта); 2 – блок принятия решений; 3 – модификатор, вырабатывающий сигнал управления блоком переключения БП; Рk – k-й регулятор; uik(t) – управление техническим состоянием i-го элемента объекта, формируемый k-м регулятором.
Необходимо отметить, что в большинстве практических случаев мощность множества K меньше мощности множества N. Более того, на практике служба ТОР осуществляет управление техническим состоянием не одного, а нескольких объектов, и потому указанное соотношение между мощностями множеств K и N проявляется еще в большей степени. Однако при этом следует учитывать способность человека адаптироваться как к динамике объекта, так и к виду воспринимаемых им входных сигналов [9]. Следовательно, службу ТОР в рамках принятых в теории автоматического управления понятий и определений можно рассматривать как управляющее устройство, состоящее из множества адаптивных регуляторов.
Заключение
Соответствующие
нормативные документы определяют в
качестве основной задачи функционирования службы ТОР задачу управления
техническим состоянием оборудования, а точнее, задачу стабилизации
параметров
технического состояния на заданном (требуемом) уровне. Это, а также
динамичность процессов потери и восстановления работоспособности
оборудования
создают предпосылки для исследования СУТС с помощью методов, принятых в
теории
автоматического управления.
Предложенные
в данной работе структурные схемы СУТС
как системы автоматического управления дают возможность анализировать
характер
и степень влияния
опыта, квалификации и
т.п. ремонтного персонала на эффективность технического обслуживания,
используя
для этого известные методы анализа устойчивости и показателей качества
САУ.
Такой
аспект исследования позволит, по нашему мнению,
получить результаты, способствующие повышению эффективности
функционирования современных
служб технического обслуживания и ремонта оборудования.
Литература
1. Надежность
и
эффективность в технике: Справочник в 10-ти кн. / Кн. 8: Эксплуатация и
ремонт
/ Под ред. В.И. Кузнецова и Е.Ю. Барзиловича. – М.:
Машиностроение, 1990. – 320
с.
2. ГОСТ
18322-78. Система технического обслуживания и ремонта техники. Термины
и
определения.
3. Скляревич
А.Н. Линейные системы с возможными нарушениями. – М.: Наука,
1975. – 352 с.
4. ДСТУ
2389-94. Техническое диагностирование и контроль технического
состояния.
Термины и определения.
5.
Солодовников В.В., Бирюков В.Ф., Тумаркин В.И.
Принцип сложности в теории управления. – М.: Наука, 1977.
–
344 с.
6. Фролов
К.В.
Уменьшение амплитуды колебаний резонансных систем путем управляемого
изменения
параметров // Машиноведение. – 1965. – № 3.
–
С. 25-30.
7. Александров
А.Г. Оптимальные и адаптивные системы. – М.: Высшая школа,
1989.
– 263 с.
8. Шульце
К.П.,
Ребер К.Ю. Инженерный анализ адаптивных систем. – М.: Мир,
1992.
– 280 с.