GA-based Global Path Planning for Mobile
Robot Employing A* Algorithm
CenZeng,
Dalian University of Technology,Dalian, Liaoning,116024.China
Zengcen2009@yahoo.cn
Qiang Zhang, Xiaopeng Wei
Key Laboratory of Advanced Design and Intelligent Computing (Dalian University),Ministry of Education Dalian,
116622.China
zhangq@dlu.edu.cn
Abstract—Global path planning for mobile robot using
genetic algorithm and A* algorithm is investigated in this
paper. The proposed algorithm includes three steps: the
MAKLINK graph theory is adopted to establish the free
space model of mobile robots firstly, then Dijkstra
algorithm is utilized for finding a feasible collision-free path,
finally the global optimal path of mobile robots is obtained
based on the hybrid algorithm of A* algorithm and genetic
algorithm. Experimental results indicate that the proposed
algorithm has better performance than Dijkstra algorithm
in term of both solution quality and computational time,
and thus it is a viable approach to mobile robot global path
planning.
Index Terms—Dijkstra algorithm, Global path-planning,
Genetic Algorithm,A* Algorithm.
I.
INTRODUCTION
The global optimal path planning as the second factor
for mobile robots have been a hotspot research area for
many years, and several optimization methods such as
potential field method [1-3], visibility graph method [2] ,
grid method [3-5], modified simulated annealing
algorithm[9] and straight line path planning[10] have
been developed to solve this problem. For the grid
method, the main problem is how to determine the size of
grid, which has great influence on both the representation
precision for obstacles and the planned path. In recent
years, many intelligent algorithms were applied to the
path planning for mobile robots, such as fuzzy logic and
reinforcement learning [6], neural network [7], genetic
algorithm [8], and so on.
II.
G
ENETIC
A
LGORITHM
T
ECHNIQUE FOR GLOBAL
R
OBOT
P
ATH
-P
LANNING
The path-planning problem is usually defined as
follows[14]: “Given a robot and a description of an
environment, plan a path between two specific locations.
The path must be collision- free (feasible) and satisfy
certain optimization criteria.”The problem emerges after
all the viewpoints are generated for a given part: find the
minimum-time movement of the eye-in-hand robot to
visit all the viewpoints. It is a reasonable assumption that
the camera completely stops at each viewpoint and the
time to execute an inspection at all viewpoints is the same,
i.e., all equal to a constant time.
Mainly, two factors determine the traverse time: (i) the
trajectory, or time history of joint positions, velocities,
accelerations, and torques, between each pair of
viewpoints: (ii) the order to visit all the viewpoints,global
path planning. Obviously if the number of viewpoints is
big, the ordering of the viewpoints will be the dominant
factor; therefore,both of the factors would be considered
in this paper.
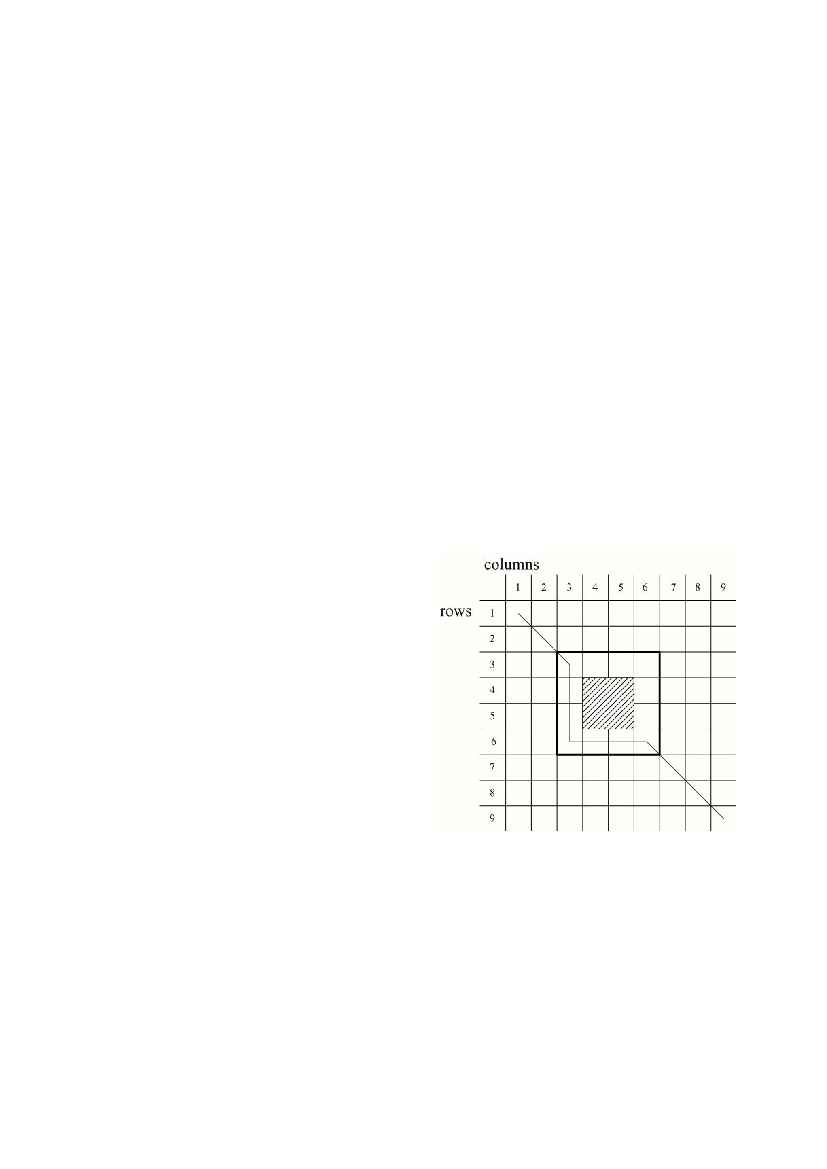
Figure 1.
Path-planning example for local obstacle avoidance,
applied on a subsection of the search space.
Global path planning requires the environment to be
completely known and the terrain should be static. In this
approach the algorithm generates a complete path from
the start point to the destination point before the robot
starts its motion. On the other hand, local path planning
means that path planning is done while the robot is
moving; in other words, the algorithm is capable of
producing a new path in response to environmental
changes. Assuming that there are no obstacles in the
navigation area, the shortest path between the start point
and the end point is a straight line. The robot will proceed
along this path until an obstacle is detected. At this point,
470
JOURNAL OF COMPUTERS, VOL. 7, NO. 2, FEBRUARY 2012
© 2012 ACADEMY PUBLISHER
doi:10.4304/jcp.7.2.470-474