Одного запуска динамического моделирования конвейерных лент
Автор: Алекс Харрисон.
Перевод: Бакланов А.В.
Источник: http://www.bulkhandling.com.au/pdfs/Conveyor-Simulation.pdf
Автор: Алекс Харрисон.
Перевод: Бакланов А.В.
Источник: http://www.bulkhandling.com.au/pdfs/Conveyor-Simulation.pdf
Алекс Харрисон - Одного запуска динамического моделирования конвейерных лент
В работе описано, каждой массой многоэлементной системы действии на ускорение, которое включает инерции сил от соседних пружин связь массы тела и силы земного притяжения наклонена, намоточные и сопротивление качению. После ускорение каждой масса определяется, элемент скоростей и перемещений может быть точно вычислен.
Скорости и пояс напряженности приведены исключительно для запуска, работы и остановки за один запуск компьютера. Включение статических и инерционных условия для каждого масса распределенная масса-упругость механическую модель используется для оценки возможных проблем дизайна. Воздействие профиля, сопротивление качению, инерции диска, приемник для трения и действия дисперсионных волн может быть рассмотрен в преддверии окончательного дизайна. Конвейерные ленты способствует анализу с использованием распределенной массой эластичности моделей. Многочисленные механические эквивалентные методы были описаны в литературе в течение многих лет. В работе описано, каждая массой многоэлементной системы действии на ускорение, которое включает инерции сил от соседних пружин связь массы тела и силы земного притяжения наклонена, намоточные и сопротивление качению. После ускорение каждой масса определяется, элемент скоростей и перемещений может быть точно вычислен. Процедура использует модифицированную Эйлера-моделирование методику, называемый "Эйлера-X", разработанный для производства очень быстро конвергентные решения [1], что дает полного запуска и остановки моделирования за время от 0,1 до 1 с.Компьютерной программы моделирования одновременно создает переходных сил в присутствии тело сил. Моделирование запуска, работы и остановки механики конвейера должны по существу включают в себя как статический (хода) и динамический компоненты силы, скорости и смещения. Альтернативы, такие как решения волнового уравнения требуют наложения статических и динамических сил как отдельные вычислительные результаты.
Метод моделирования, используемые в работе, не требует использования любых принципов суперпозиции. Для общего применения, метод моделирования была разработана как нормализованная "Юнит-стандарт». Каждый массы, силы тела и демпфирующие элементы имеют соответствующих соотношениях относительно жесткости блока ленты. Таким образом, модель бесконечно масштабируемой. Приложения включили исследование влияния сопротивления качению на динамическое распространение стресса, эффект липкой намоточные, так и принимающий выплаты на динамические всплески лавы конвейеры, и эффект инерции привода на амплитуды волн.
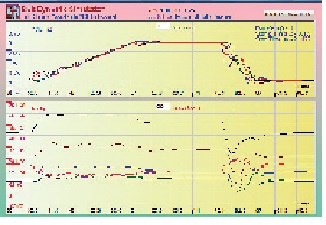
Рисунок 1. Моделирование запуска, работы и остановки в одном моделирования. Пояс скорости и напряженности показаны для 8 Местоположение (следы: Черный = T1, T2 = красный, синий = хвост, зеленый = Выполнено в стороне около хвоста).
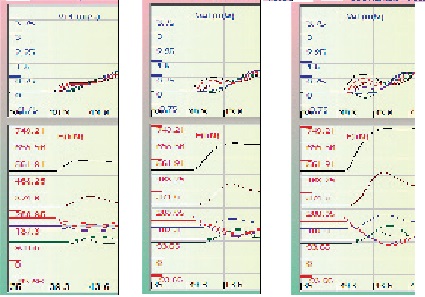
Рисунок 2. Влияние прокатки отступы убыток от волновой фронт амплитуд на отколовшейся запуска.
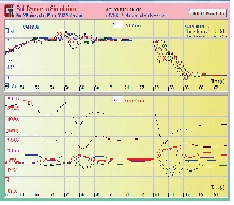
Рисунок 3. Приемное дивидендных выплат и настройки моделирования, активированный около 4 секунд после пояса достигает полной скорости.
Прогнозируемая скорость и силу для истории длиной 2 км сухопутной пояса показаны на рисунке 1. Пояс затем несколько снижается возрастает с общим подъемом 7 градусов около половины ее длины, и передает 2000 т / ч со скоростью 3 м / сек. Конвейер используется ST-2500 металлокорда пояс с ремнем модулем E = 180 000 кН / м. Затухания к жесткости коэффициент, используемый для модели C / K = 0,15 с за исключением хвоста, где это значение увеличивается на прогиб эффектов. Применение этих данных в 8-массовой модели для переноса и возврата стороны, авто-компьютерная статическая напряженность взяты непосредственно от полного графа моделирования, показанного на фиг.1 следующим образом: T1 (в рабочем состоянии) = 570 кН; T1 (остановки) = 480 кН, прокатка потери = 90 кН (выполнять). T2 (в рабочем состоянии) = 187 кН; T2 (остановки) = 237 кН, прокатка потери = 40 кН (возврат). T1 = 650 ускорит кН; Время начала = 21,8 с; Stop Time = 6,6 с. Волна действие происходит на запуск и остановка. Остановки Время не является входным к модели, так как модель вычисляет остановки импульса. При запуске, хвост конвейера рядом точка нагрузки меняет немного из-за различий между снести и вернуть потери прокатки для начальной напряженности пояса. Упругие скорость волны определяется из хвоста начала временной задержки, что составляет около 0,9 с, что в среднем упругих волновых фронтов скорость из 2220 м / сек. На перенос стороне около хвоста, натяжение ремня стремится к нулю при остановке. В этом случае конструкция потребует увеличения в приемной предварительному натяжению. Номинальная хвостовая напряженность была установлена на уровне 92 кН для первого запуска. Трогания прокатки и потерь важным применением механического подход моделирования является возможность показать влияние сопротивления качению на амплитуду волны в скорости домена. Качению сопротивление крышки ремня результат в менее строгой динамическое воздействие на отколовшейся. Несколько испытаний на модели для очень низких и аномально высокое сопротивление качению отступа показывает, что сепаратистских амплитуды волнового фронта увеличивается отступ сопротивление повышается, показано на рисунке 2 для примера конвейера. Модель позволяет отколовшейся значение для холостой уплотнений отдельный вход со статическим работает холостой сопротивления, которое является функцией нормальной нагрузки и скорости, в то время как вязкоупругого отступ потери считается постоянным для любого данного каучук типа, так как скорость фронта волны значительно превышает отступ ставку на каждом лентяй. Низкие потери отступы бы определяется коэффициент DIN трения 0,007. Высокая отступ потерь было бы равносильно фактор DIN более 0,03. Примечание что на Рисунке 2 пояса с высокими потерями прокатки (Которая включает в себя отступы, пояса и изгиб материала и перетащить неработающее уплотнение) более склонны к некоторой начальной runback на отколовшейся при низкой напряженности районов. Здесь, начальная скорость волны амплитуда увеличивается по интенсивности, так же как и исходное напряжение. В сущности, ремень сопротивление смещению в присутствии изменение напряжения. Общее низкое сопротивление качению комбинированных приведет является более гладкой, меньше динамической начала ремня. Лебедки с трением другие динамические эффекты могут возникать в конвейерах, которые имеют активные натяжения. Например, лебедки расположены за привод при T2 часто показывают непредсказуемые поворотные которая является результатом выплата пояса в систему в качестве материала нагрузки на происходит. Если лебедка перевозки или канатные блоки содержат достаточное трение, лебедки могут не окупиться или тянуть немедленно в ответ на натяжение ремня изменения на Т2. Задержка в ответ может лебедки привести к скольжению диска или мгновенное изменение скорости ленты на приемный выплата при трении сопротивляется приемной перемещения каретки [2]. Подземная долгосрочной стенка ремни, которые аналогичны примеру пояса часто демонстрируют неустойчивый приемной позиции изменения. Рисунок 3 показано моделирование лебедки выплаты сразу после пример пояса достигла полной скорости. В этом случае динамический увеличение скорости движения ленты будет наблюдаться до тех пор напряженность не восстанавливаются в T2 области. Моделирования показано влияние на напряженность T1 и T2 на пример, в котором лебедки хвост область активирует только после полной скорости. Если лебедка были расположены на Т2, любое провисание ремня в результате приемной выплата начнет волнового фронта и может вызвать импульс низкого напряжения должны быть распространены на хвосте пояса. Такое состояние может также возникать при лебедки и шпиле комбинации используются для поддержания номинального приемной масса положение между пределы, особенно если предел управление зависит от трения в механической структуры. Восприятие движение не показано на рисунке, но легко отображается от приемного массивов массового перемещения в случае необходимости.
Другим фактором, который влияет на динамические силы и массы перемещений, в частности, на остановке, является вращающийся диск инерцию переведены на линии пояса. Для изучения этого эффекта,
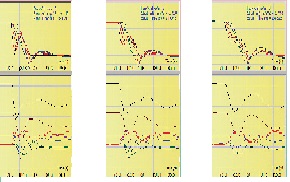
Рисунок 4. Влияние инерции дисков на динамическом воздействии волны.
остановки динамику пример ленты показаны на рисунке 4 в течение 3 эквивалентной массы диска. Новые теории были разработаны, чтобы позволить моделирования эффекта показаны оба фиг.2 и 4, однако здесь достаточно, чтобы представить типичные Моделирование результатов. На рисунке 4, вход привода масса модели переменной. Для остановки моделирования, модель получает заставляя функции (импульс), который включает привод массы. Остановка динамики в 8 местах вдоль трассы ношения и возвращения пояса вычисляется из модели и используются для отображения различных эффектов привода инерции. В случае низкой инерции диска, начальные скорости остановки быстрые и введение третьего порядка мод колебаний очевидна. Эти эффекты будут делать больший спрос, скажем, на лебедке приемной отвечать или умертвил в остановку Если лебедку активны. В случае большой момент инерции диска, напряженность около хвоста становится более позитивным и лебедкой приемной должны убил менее быстро. Иногда, более продолжительной остановки вызванного повышением инерции диска может превышать время остановки вне ремнями, или местным законам безопасности. В каждом случае процесс анализа, работает, обеспечивая конструктивных параметров, который будет создан. Выводы динамического моделирования конвейерных лент требует механического анализа пояса для вывода уравнений, управляющих элементов ускорений. После разработки, модель имеет широкое применение для моделирования многих реальных условиях операционной конвейера и контроля условий. Блок-стандартная модель, используемая в данной работе является масштабируемой до любого диапазона входных переменных. Моделирования обсуждается в статье пролить новый свет на пути распространения волновых фронтов в присутствии прокатки сопротивления. Большая часть исследований в динамическом поведении ремни течение многих лет может быть объяснено с использованием методов моделирования показано в работе, таких как эффекты инерции привода на волне тяжести во время остановки. Остановка динамику оказывает существенное влияние на скорость нарастания лебедкой и контроля дизайна. Моделирование динамического поведения ремни является вызовом, который требует модель, которая основана на принципах механического звука, ориентируется на результаты полевых испытаний по мере возможности, и результаты в математическом моделировании стабильные программы. Использование моделирования для получения контроль динамики и исследовать нелинейные и эффектов, связанных с трением в реальных системах был обсужден и является постоянной областью применения.
1.(2008). Нелинейные Пояс анализа переходных процессов. Обработки сыпучих материалов. Том 23, № 4, стр. 240 - 245 (в печати)
2. (1992), Современные пояса Take-взлеты и их динамического движения.
Перевалка сыпучих твердых тел, Vol. 12., № 4, стр. 581-584 (1992) * Алекс Харрисон. PhD, FIEAust, бывший профессор в области машиностроения факультет MERZ / TUNRA Председатель Перевалка сыпучих материалов и транспортировки, Университете Ньюкасла, Новый Южный Уэльс и в настоящее время директор ООО Конвейер Технологии ООО в США.