
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Использование нейронных сетей
- 2.1 Задача прогнозирования
- 2.2 Задача классификации
- 3. Цели и описание основного принципа исследования
- 4. Три основных направления работы
- 4.1 Гибридный интерфейс управления электромеханическим креслом
- 4.2 Тросточка для слепых
- 4.3 Робот Нао
- Выводы и последующие этапы работы
- Список источников
Введение
Нейронные сети являются очень популярными в области искусственного интеллекта и автоматического обучения. Они представляют собой технологию, уходящую корнями во множество дисциплин: нейрофизиологию, математику, статистику, физику, компьютерные науки и технику. Они находят свое применение в разнородных областях, благодаря одному важному свойству — способности обучаться на основе данных при участии учителя или без его вмешательства.
Нейронные сети используются практически везде:
- промышленность: контроль качества, устранение неполадок, корреляции между данными из различных датчиков…
- финансы: прогнозирование и моделирование ранка (валют…), выбор инвестиций, кредитование…
- телекоммуникации и информационные технологии: анализ сигналов, подавление шума, распознавание образов (звуки, образы, слова) , сжатие данных…
- окружающая среда: оценка риска, химического анализа, прогнозирование и моделирование погоды, управление ресурсами…
1. Актуальность темы
Следствием широкого распространения нейронных сетей стала разработка большого количества разнообразных алгоритмов обучения нейронных сетей и их модификаций. Таким образом, актуальной является задача разработки метода выбора рационального подхода к решению определённых задач с помощью нейронных сетей.
2. Использование нейронных сетей
2.1 Задача прогнозирования
Одним из основных достоинств нейронных сетей является возможность имитации процессов с большим количеством влияющих параметров, что является очень сложным или невозможным для традиционных методов в подобных условиях, например, методов оптимизации. Важной есть задача выбора рационального подхода к решению определённых задач с помощью нейронных сетей.
Важнейшая особенность сети, свидетельствующая о ее широких возможностях и огромном потенциале, состоит в параллельной обработке информации всеми звеньями, что позволяет значительно ускорить процесс обработки информации. Кроме того, при большом числе межнейронных соединений сеть приобретает устойчивость к ошибкам, возникающим на некоторых линиях. Другое не менее важное свойство – способность к обучению и обобщению накопленных знаний. Нейронная сеть обладает чертами искусственного интеллекта. Натренированная на ограниченном множестве данных сеть способна обобщать полученную информацию и показывать хорошие результаты на данных, не использовавшихся при ее обучении . В настоящее время нейронные сети используются для решения целого ряда задач, одной из которых является задача прогнозирования.
Прогнозирование – это предсказание будущих событий. Пусть заданы n дискретных отсчетов {y(t1), y(t2)..., y(tn)} в последовательные моменты времени t1, t2,..., tn . Тогда задача прогнозирования состоит в предсказании значения y(tn+1) в некоторый будущий момент времени tn+1 [1].
Целью прогнозирования является уменьшение риска при принятии решений. Прогноз обычно получается ошибочным, но ошибка зависит от используемой прогнозирующей системы. Предоставляя прогнозу больше ресурсов, можно увеличить точность прогноза и уменьшить убытки, связанные с неопределенностью при принятии решений. Типичными приложениями техники прогноза являются предсказание цен на фондовой бирже, прогноз погоды, прогноз потребления электроэнергии, прогноз отказов технических систем и пр.
Чаще всего в работах рассматривается применение нейронной сети для решения задачи прогнозирования временных рядов. Пользователь выбирает произвольный временной ряд, содержащий N отсчетов, и разбивает его на три множества: обучающую, тестирующую и контрольную выборки, которые затем подаются на вход сети. Результатом прогнозирования является значение временного ряда в требуемый момент времени [2].
2.2 Задача классификации
Решение задачи классификации является одним из важнейших применений нейронных сетей. Задача классификации представляет собой задачу отнесения образца к одному из нескольких попарно не пересекающихся множеств [3]. Примером таких задач может быть, например, задача определения кредитоспособности клиента банка, медицинские задачи, в которых необходимо определить, например, исход заболевания, решение задач управления портфелем ценных бумаг (продать купить или "придержать" акции в зависимости от ситуации на рынке), задача определения жизнеспособных и склонных к банкротству фирм.
3. Цели и описание основного принципа исследования
Нейронные сети особенно полезны для решения задач классификации, прогнозирования, ассоциативной памяти и оптимизации [4].
Наша основная цель состоит в создании алгоритма классификации и прогнозирования с помощью нейронных осцилляторов, а именно достаточно нового феномена в истории рекуррентных сетей – нейросетей эхо состояний (в зарубежной литературе используется термин Echo State Network) [5].
Основная идея ESN разделена с машиной неустойчивых состояний (Liquid State Machine), которые были разработаны независимо, но одновременно Вольфгангом Маасом. Они были включены в категорию, которая называется резервуарным исчислением (Reservoir Computing) [6].
А теперь подробнее про эхо сети. Архитектура нейронных эхо сетей сходна с рекуррентными нейронными сетями и содержит входной слой, скрытый слой, охваченный обратными связями и называемый также «динамическим резервуаром», и выходной слой, считывающий информацию из скрытого слоя. Основная особенность нейронных эхо сетей заключается в том, что настраиваемыми являются только синаптические веса выходного слоя, для обучения которых могут применяться оптимальные по быстродействию адаптивные алгоритмы линейной идентификации [7], [8]. Веса же скрытого слоя сети задаются один раз при инициализации сети и не изменяются в процессе ее функционирования.
При подаче на вход такой сети некоторого сигнала он фиксируется во входном слое. Затем производится несколько итераций в скрытом слое сети, пока его выходные сигналы не стабилизируются. При этом в скрытом слое наблюдаются ослабленные по амплитуде образы предыдущих состояний сети, откуда и произошло название «эхо сеть». Выходной сигнал сети формируется с помощью считывания выходным слоем информации из скрытого слоя сети [9].
Архитектура эхо сети может выглядеть следующим образом:
Анимация: 5 кадров, длительность каждого - 500 ms, 60 Кб
Эта последовательность соответствует той эхо сети, которая может организовать алгоритм прогнозирования. То есть, предположим, что у наc дан временной ряд x(t), сеть принимает на вход x(t) и должна выдать на выходной слой прогноз для значения x(t+1).
Для того чтобы преуспеть, нам надо рассмотреть три направления, которые были предложены.
4. Три основных направления работы
4.1 Гибридный интерфейс управления электромеханическим креслом
Управление инвалидным креслом основывается на действии человека движущимися руками, которые фиксируются на колесе. Этот тип действия может быть травматическим после использования его в течении многих лет. Поэтому, это очень интересно, включить другой способ – гибридного управления предоставленного двигателем. Когда человек действует на колёса, двигатель автоматически активируется, чтобы помогать движению, в частности и при движении кресла вверх. Это сопровождение, таким образом, является более легким для человека, так как, позволяет ему сохранять силы во время ускорения и торможения инвалидного кресла.

Рисунок 1 – Исследуемое нвалидное кресло Invacare Storm XS
Целью является обеспечение отрыва рук от колеса. Действие человека осуществляется с помощью муфты свободного хода, которая играет роль интерфейса приведения в действия двигателя нагрузкой вращения колеса кресла.
Должно быть определено два аспекта:
- Промежуточное колесо должно быть жёстко адаптировано для облегчения действия человека. Эта часть функции интерфейса.
- Управление кресла должно быть функцией, которая зависит от действия человека на промежуточное колесо и природы наклона покрытия. Эта часть функции управления.
Очень важно адаптировать эти две части для оптимизации смещения инвалидного кресла. Эта оптимизация основывается на идентификации возможностей действия человека и на адаптации алгоритмом обучения реализации управления.

Рисунок 2 - Управление кресла должно быть функцией, зависящей от природы наклонв покрытия
Работа также будет состоять из таких моментов:
- изучение функций интерфейса и управления;
- идентификация возможностей и адаптации управления;
- реализация экспериментальных устройств на основе LISV;
- тесты и анализ.
4.2 Тросточка для слепых
Лаборатория LISV университета Версаль-Сен-Кантен-ан-Ивелин обеспечила нас данными, сделанными с тростью для слепых. Там уже занимаются над улучшенной версией трости, но уже есть результаты, с помощью которых можно потренироваться. Были присланы три документа, содержащие записи, сделанные на деревянном полу, тротуаре и линолеуме (внутри помещения). В файле есть пять столбцов: первый показывает значения пьезоэлектрического датчика, который позволяет считывать вибрации на уровне руки лица, которое держит трость. Следующая колонка содержит данные оптического датчика, который мы в данный момент ещё не используем. Последние три колонки показывают ускорение на осях X, Y и Z, снятое с акселерометра, который прикреплён на конце трости. Частота выборки из всех тёх датчиков составляет 800 Гц. Был поставлен вопрос о классификации поверхности, чтобы помочь слепым людям лучше ориентироваться на незнакомой территории.

Рисунок 3 - Слепой человек, шагающий по тротуару с использованием исследуемого объекта
Чтобы выполнить нашу поставленную задачу – классифицировать эти три покрытия, нам нужно выявить характеристические особенности каждого из материалов. В данном случае значения акселерометра отличаются своими спектральными составляющими. Чтобы их сравнить был создан script и построены следующие зависимости в пакете прикладних програм MATLAB. Вот результаты, полученные для тротуара:
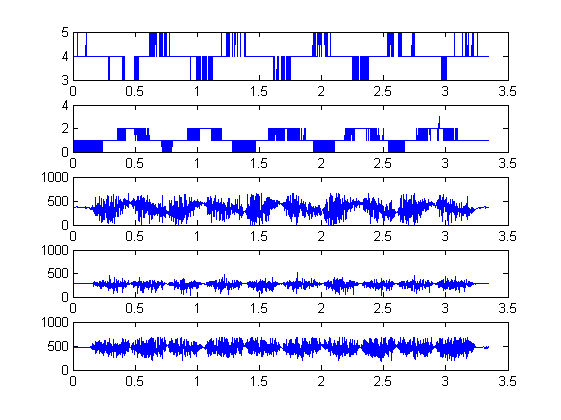
Рисунок 4 - Данные датчиков
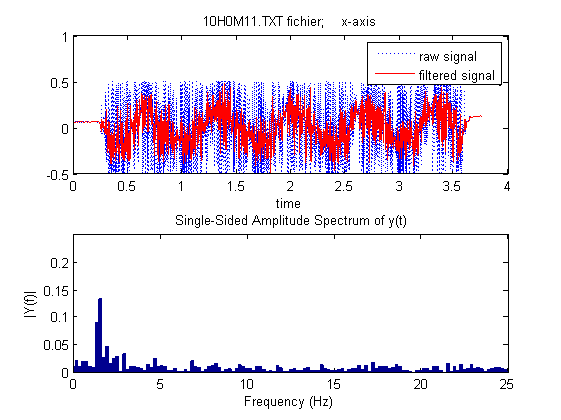
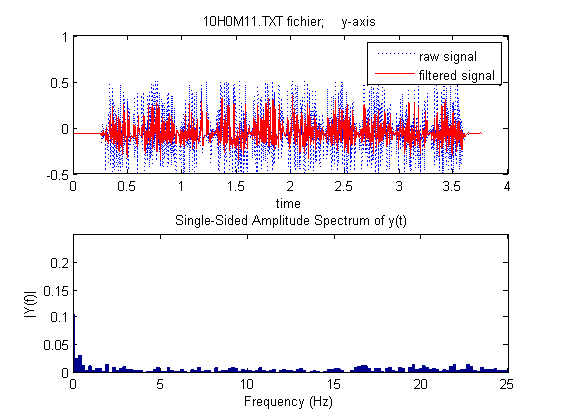
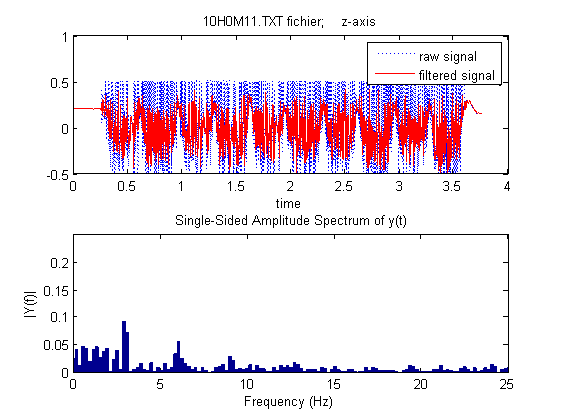
Рисунок 5 – Данные акселерометра, то есть мгновенные значения ускорения на трёх осях X , Y и Z и их спектральные составляющие
Следующим нашим шагом уже будет использование полученных результатов, чтобы обучить эхо сеть, беря во внимание значения пьезодатчика и акселерометра. Так как существует три класса, одно из возможных решений – это использовать алгоритм «одни против всех». Идея заключается в обучении эхо сети на распознавание данных, полученных по дереву, в то время как данные линолеума и тротуара считать как не-дерево. Затем ещё раз начнем с новой эхо сетью распознавать линолеум по отношению к дереву или тротуару, потом закончим эхо сетью, которая обучится распознавать тротуар среди дерева и линолеума. Так, будем иметь три сети, каждая из которых способна распознавать своё покрытие. Если мы дадим новый сигнал, который мы стремимся классифицировать, достаточно будет только глянуть на результаты каждой сети.
4.3 Робот NAO
Достижения в области робототехники сделали возможным сегодня изобрести человекоподобных роботов, которые включают в себя множество интерактивных возможностей: распознавание и синтез голосов, тактильные датчики. Интересно представить себе устройство, которое способно помочь человеку, но NAO мы можем попросить подобрать и принести какой-нибудь объект [10].
Разработанный компанией Aldebaran Robotics, робот ростом 58 сантиметров обладает полным спектром движений, позволяющих ему вставать из положения сидя, а так же ходить. Даже если робота ненароком опрокинуть, он самостоятельно поднимется на ноги. NAO разработали во Франции и с 2005 года эта модель управляемого робота постоянно совершенствуется. Так, раньше он умел танцевать под музыку, неплохо передвигаться и даже играть в футбол. Теперь же он способен самостоятельно найти зарядное устройство и сесть на зарядку, чтобы подпитаться энергией.

Рисунок 6 – Робот NAO
Но что известно о функциях знаменитого робота NAO. Это фактически платформа открытого аппаратного средства, то есть иначе говоря, экспериментальная платформа, на которой возможно запрограммировать различные реакции в зависимости от активации датчика.
Робот имеет 500-мегагерцевое X86 сердце и 256 Мб оперативной памяти, а от одного заряда аккумулятора он способен бодрствовать до полутора часов. NAO оснащен множеством датчиков, среди которых: акселерометр, 4 микрофона, гидродатчики. Они помогают роботу сидеть, стоять, подняться после падения, находить и поднимать небольшие объекты, реагировать на прикосновения и обходить препятствия. Заводится Nao от легких похлопываний по голове, именно там находится тактильный сенсор, реагирующий на прикосновения. Кроме сенсора, в голове находятся две камеры, сканирующие и изучающие предметы. Робот наделен 25 степенями свободы, например, только на руки приходятся 10 степеней. Четыре микрофона для распознавания речи настроены на английский и французский язык. Nao работает под управлением операционной системы Linux.
Основное инновационное отличие Nao от многих других роботов – это то, что он запрограммирован на самообучение. Собирая данные об окружающем мире и, обрабатывая их, робот выстраивает собственное представление о мире, и учится предсказывать последствия собственных действий.
Когда Nao грустит, он подает плечи вперед и опускает голову; в счастливом расположении духа он поднимает руки и даже тянется с объятиями. А если Nao испугать, то он съежится и будет сидеть в таком положении, пока кто-нибудь его не разбудит, ласково похлопав по макушке. Авторами разработки стали инженеры Хартфордширского университета (Англия). Быть может, технические характеристики Nao несколько уступают японским аналогам, зато у европейских ученых есть один серьезный козырь: при разработке они концентрируют усилия на особенностях взаимодействия робота и человека.
При исследовании использовалось ПО, которое способно распознавать разные части человеческого лица и определять по ним эмоциональное состояние.
Мы думаем, что работа по Nao является очень перспективной и будет интересной и полезной. К тому же, существует связь между толчками Nao, которые нарушают его равновесие и толчками кресла, которые нарушают его направление и угол наклона движения. Это очень хороший способ, научиться работать с Nao, так как действительно есть связь с помощью третьего лица для инвалидного кресла. Лаборатория LISV имеет команду, состоящую из роботов Nao для чемпионата Robocup. Robocup является международным турниром робототехники, одной из целей которого будет создать футбольную команду из роботов способную победить в схватке с командой – чемпионом мира среди людей. Эти роботы достаточно легко падают, когда их толкают. Сейчас коллеги лаборатории работают над тем, чтобы дать Nao рефлекторные движения, которые позволят ему устоять, занимаются обнаружением ударов, способных сбить с ног робота и ударов, которые оставят его стоять. Основная задача тут – это использовать эхо сеть для временного прогнозирования, а затем создать классификацию для обнаружения падения.

Рисунок 7 – RoboCup роботов NAO
Безусловно, робот NAO очень умный и это еще один шаг к годсподству роботов над людьми, однако на данном этапе этот маленький помощник - лишь предмет для изучения в университетах, но никак не завоеватель и вредитель.
Выводы и следующие этапы работы
На данном этапе мы провели работу по анализу всех предоставленных данных. В данный момент времени есть трудности с реализацией алгоритма классификации. Также следует глубже изучить робота Nao, чтобы иметь меньше проблем при классификации для обнаружения падения. Мы считаем, что все три части работы являются интересными и дополняют друг друга, так что в скором будущем должны реализовать алгоритмы прогнозирования и классификации для всех случаев.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2012 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Крисилов, В.А. «Представление исходных данных в задачах нейросетевого прогнозирования» / В.А.Крисилов, К.В.Чумичкин, А.В.Кондратюк. Одесса: ОНПУ. 2003
- Барцев С.И. Некоторые свойства адаптивных сетей (программная реализация).- Красноярск: Институт физики СО АН СССР, - 1987.
- Пупков К.А. «Методы классической и современной теории автоматического управления»/ К. А. Пупкова, Н. Д. Егупова. – М.: Изд-во МГТУ, 2004.
- Site officiel de L'institut d'électronique et d'informatique Gaspard-Monge/ [Електронний ресурс]. – Режим доступу:
http://www-igm.univ-mlv.fr/~dr/XPOSE2002/Neurones/index.php?rubrique=Accueil - Jaeger Herbert. Reservoir computing approaches to recurrent neural network training / Jaeger Herbert, Lukosevicius Mantas. – Elsevier, 2009. – pp. 127-149.
- Jaeger Herbert. The «echo state» approach to analysing and training recurrent neural network – with Erratum note / Jaeger Herbert. – 2010. – pp. 4-5
- Райбман Н.С., Чадеев В.М. Построение моделей процессов производства. – М.: Энергия, 1975. – 376 с.
- Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. – М.: Наука, 1991. – 432 с.
- Бабенко А.В., Бодянский Е.В., Попов С.В. Нейро-фаззи эхо сеть для прогнозирования состояний и диагностики электроэнергетических систем [Електронний ресурс]. – Режим доступу:
http://archive.nbuv.gov.ua/portal/natural/Ikszt/2009_4/4_2009_5.pdf - Site officiel de Nicolas TEXIER/ [Електронний ресурс]. – Режим доступу:
http://www.nicolas-texier.net/fr/projet-nao-d%C3%A9tecter-et-suivre-une-balle