Назад в библиотеку
Формирование траектории торможения с ограничением рывка
Автор: Московец П.А., Мунзер Аль Аттар, студенты; Розкаряка П.И., доц., к.т.н.
Источник: Вісник кафедри "Електротехніка" за підсумками наукової діяльності студентів. — Донецьк, ДонНТУ, 2012 — с. 71-72.
<
Проблематика статьи и её решение
Одним из способов ограничения рывка является установка на
входе системы автоматического управления задающего устройства,
формирующего эталонные сигналы задания на изменение основных
координат электропривода. Для позиционных электроприводов
такими координатами являются положение φ, скорость ω, ускорение ε и рывок ρ.
Рассмотрим методику формирования диаграмм торможения при необходимости огработки заданного положения Δφз за заданное время t0 с некоторой начальной
скоростью движения ω0 с учетом ограничений на ускорение ε0 и рывок ρ0. При
реализации приведенных диаграмм достаточно сформировать сигнал задания на рывок ρ(t), а оставшиеся координаты (ускорение ε(t), скорость ω(t) и перемещение Δφ(t))
получить его последовательным интегрированием [1]. Для формирования диаграмм достаточно иметь только координаты узловых точек графиков рывка ρ(t).
Наиболее простой для реализации является диаграмма отработки перемещения с максимальным быстродействием и ограничением рывка (рис. 1).
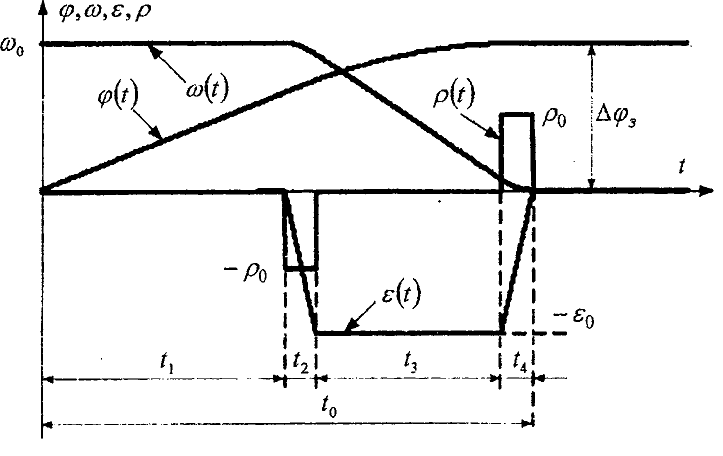
Рисунок 1 - Диаграмма отработки перемещения с максимальным быстродействием и ограничением рывка
Неизвестными величинами для формирования этой диаграммы являются параметры участков времени t1, t2, t3 и t4. Так как величина рывка одинакова в начале и в конце торможения, то можно записать:
После завершения отработки перемещения кривая скорости должна приходить в ноль, т.о. можно записать:
Откуда выразим t3:
Запишем выражения для перемещений на каждом участке (рис.1) и просуммируем их:
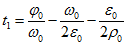
Подставим времена t2, t3 и t4 получим время t1:
При формировании траектории торможения с ограничением рывка также можно реализовать параболическую форму скорости, позволяющую уменьшить тепловые потери. Такие параболические тахограммы без ограничения ускорения и с его ограничением представлены на рис. 2. Для этих диаграмм методика нахождения характерных точек аналогична вышеприведенной. Результаты всех расчетов приведены в табл. 1.
Таблица 1 - Формулы для расчета характерных точек диаграмм торможения с ограничением рывка
| Диаграмма отработки перемещения с максимальным быстродействием и ограничением рывка |
 ; ;
 ; ;
 . .
|
| Диаграмма отработки перемещения с параболической тахограммой с ограничением рывка | 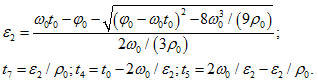 |
| Диаграмма отработки перемещения с параболической тахограммой с ограничением ускорения и рывка |  |
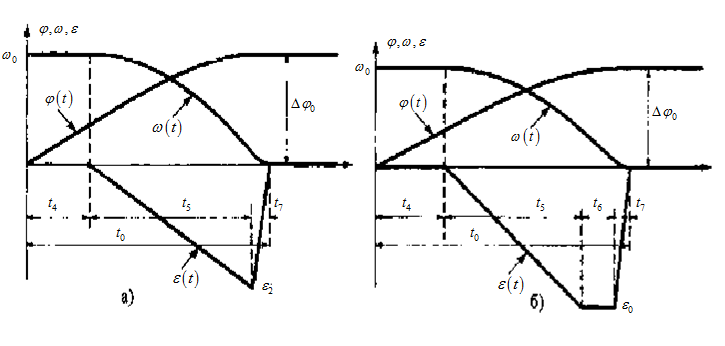
Рисунок 2 - Параболические тахограммы торможения без ограничения ускорения (а) и с его ограничением (б)
Список использованной литературы
1. Толочко О.И. Синтез задатчика положения с ограничением рывка при учете статического момента / О.И. Толочко, П.Х. Коцегуб, П.И. Розкаряка // Вісник Кременчуцького державного політехнічного університету: Наукові праці КДПУ. - Кременчук: КДПУ. - 2008. - №3 (50). - 4.1. - С. 58-63.