Авторы: R. Micheletti, R. Fieri
Перевод: Л.О. Тетерина
Источник: http://www.imeko.org/publications/wc-2003/PWC-2003-TC4-016.pdf
ИЗМЕРЕНИЕ ЧАСТОТЫ СКОЛЬЖЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Аннотация – в статье точное измерение скольжения
асинхронных двигателей. Предложенная процедура использует неразрушающую схему
измерения скольжения, основанную на цифровом фильтровании и динамической оценке
параметра. Измерение скольжения выполнено без датчика скорости и выведено,
анализируя спектр гармоники магнитного поля в близости асинхронного двигателя.
Сначала ЭДС вызвала форму волны, взятую из поиска катушку, фильтруется с
помощью алгоритмов, основанных на дискретное преобразование Фурье. Тогда частота
статора и частота ротора получены, сравнивая фильтрованное напряжение с
математической моделью, используя процедуру оптимизации. Параметры модели
варьируются, пока адекватное соответствие не будет получено с отфильтрованным напряжением.
Результаты эксперимента представлены для проверки этого метода.
Ключевые слова: Асинхронные двигатели, измерение скольжения,
цифровая фильтрация.
1 ВВЕДЕНИЕ
Диски асинхронного двигателя теперь находятся все
больше в перерабатывающей промышленности из-за применения ориентируемой
стратегии управления области. Тем не менее, эффективность такого метода
управления сильно зависит от точности параметров двигателя, используемых в
векторе контроллера. Известно, что изменение сопротивления ротора и ротора
постоянное время имеет самый доминирующий эффект на работу контроля. К
сожалению, сопротивление ротора зависит широко от температуры ротора и от
частоты скольжения, приводящей к разрушению двойного условия потока и
вращающего момента.
В последние годы много исследований тогда выполнены,
чтобы преодолеть эту ситуацию. Методы оценки, чтобы получить использование
параметров ротора расширили подход фильтра Кальмана [1], технический
наблюдатель [2] и адаптивная система [3].
Она активно продолжает исследовать по скорости –
векторного управления, который оценивает скорость ротора и частоту скольжения
без датчика скорости. Обнаружение частоты скольжения выполнено, используя
гармонику ротора [4], [5] или зондирования и эксплуатируя ток статора [6].
Эта работа представляет алгоритм для точного измерения
частоты скольжения, основанный на цифровом фильтровании и динамическом методе
оценки параметра [7] – [10]. Измерение частоты скольжения выполнено без датчика
скорости и выведено, анализируя спектр гармоники магнитного поля в близости асинхронного
двигателя. Сначала ЭДС вызвала форму волны, взятую из поиска катушку,
фильтруется, с помощью алгоритмов, основанных на дискретное преобразование
Фурье. Тогда частота статора, частота ротора и последовательно частота
скольжения получены, сравнивая фильтрованное напряжение с математической
моделью, используя процедуру оптимизации. Тогда частота статора и частота
ротора получены, сравнивая фильтрованное напряжение с математической моделью,
используя процедуру оптимизации. Параметры модели варьируются, пока адекватное соответствие не будет получено
с отфильтрованным напряжением.
Результаты эксперимента представлены для проверки этого метода.
Параметры, которые затрагивают исполнение алгоритма,
являются по существу размером окна данных, темпом осуществления выборки и
особенностями фильтра.
Эффект ошибки квантования от входного напряжения,
введенного 12 – бит А/Ц, преобразователь был включен в анализ. Влияние на
точность измерения скольжения других двигателей, работающих в близости также
проанализировано, и это нанесено на карту ответ системы измерения в нескольких
положениях поиске катушки.
Математическое развитие алгоритма представлено и
эффекты основных параметров, которые затрагивают исполнение алгоритма,
обсуждены. Представлен представительный набор экспериментальных результатов
испытаний.
Предложенный метод может быть достоверно применен в идентификации
параметра ротора в стационарных условиях и ходовых испытаний.
2. АЛГОРИТМ ОЦЕНКИ СТАТОРА И ЧАСТОТЫ РОТОРА
fs частоты статора и частота ротора f получены с той же
самой процедурой, сравнивая соответствующие фильтрованные напряжения с
математической моделью, используя метод оптимизации.
После операции фильтрации мы получаем ряд
"n" образцы статора (ротора) напряжения. Фильтрованное напряжение
может быть приближено синусоидой
![]() (1)
(1)
где V и амплитуда и ![]() фаза, соответственно. Переписывая напряжение с
точки зрения компонентов квадратуры
фаза, соответственно. Переписывая напряжение с
точки зрения компонентов квадратуры
![]() (2)
(2)
с
 (3)
(3)
Расширение v (t) в ряд Тейлора в окрестности
заданных значениях ![]() параметров
параметров ![]() дает
дает
![]() (4)
(4)
где более высокого порядка, условий он расширения
игнорируются, и ![]() Принцип работы методика оценки основан на сравнении между реальными значениями отфильтрованного напряжения и значения оценки
модели. Таким образом, проблема состоит в определении параметров
Принцип работы методика оценки основан на сравнении между реальными значениями отфильтрованного напряжения и значения оценки
модели. Таким образом, проблема состоит в определении параметров ![]() , которые в состоянии минимизировать ошибку
между значениями выборки и оценки значений. Общая площадь ошибке
, которые в состоянии минимизировать ошибку
между значениями выборки и оценки значений. Общая площадь ошибке ![]() , в момент, выражается
в виде
, в момент, выражается
в виде
![]() (5)
(5)
где ![]() и
и ![]() представляют собой выборку выходы
реальной системы после фильтрации
и эталонной модели в момент времени, соответственно. Подставим (4) в (5) получим
представляют собой выборку выходы
реальной системы после фильтрации
и эталонной модели в момент времени, соответственно. Подставим (4) в (5) получим
 (6)
(6)
Общая площадь ошибки сведена к минимуму путем решения частных производных (6) относительно ![]() оценивается в
оценивается в ![]()
![]() ;
; ![]() ;
; ![]() (7)
(7)
Там результаты после перестановки
Решение (8) дает поправки
и необходимые для того, чтобы обновить
параметры ![]() и
и ![]() для каждого шага итерации. Этот рекурсивный метод позволяет получить неизвестные статора и частоту ротора с хорошей точностью. Наконец частоты
скольжения задается
для каждого шага итерации. Этот рекурсивный метод позволяет получить неизвестные статора и частоту ротора с хорошей точностью. Наконец частоты
скольжения задается
![]() (9)
(9)
Итерационные методы хорошо известны за свою
чувствительность к первоначально предполагаемым неизвестных. Начальные значения, используются для эталонной модели, определяются следующим
образом. Начальное значение ![]() получается с помощью первых пяти образцов входного
напряжения
получается с помощью первых пяти образцов входного
напряжения

Начальное значение ![]() и
и ![]() определено, решая систему:
определено, решая систему:

3. РЕЗУЛЬТАТЫ
Алгоритм измерения был проверен, чтобы
исследовать законность этой техники.
Номинальные значения асинхронного
двигателя, используемого в экспериментах, приведены в таблице 1.
Таблица 1 – Номинальные значения испытания асинхронного
двигателя
|
Мощность |
11 кВт |
|
Напряжение |
400 В |
|
Ток |
|
|
Частота |
50 Гн |
|
Оборот в минуту (об/мин) |
1450 |
|
cos φ |
0.85 |
Измерение частоты скольжения
выполнено, анализируя форму волны вызванной ЭДС, взятой из поиска катушки, из-за
магнитного поля в близости асинхронного двигателя.
Рис. 1 показывает форму волны
вызванной ЭДС с двигателем, ненагруженным в 1498 об/мин ![]() .
Очевидно, это условие является, наиболее, тяжелым, так как слабые значения
ЭДС на роторе частотный
компонент может снизить точность
измерений, причем это требует
более длительного приобретение интервала.
.
Очевидно, это условие является, наиболее, тяжелым, так как слабые значения
ЭДС на роторе частотный
компонент может снизить точность
измерений, причем это требует
более длительного приобретение интервала.
С более реалистическими рабочими
условиями частота скольжения примерно ![]() соответствующей частоте ротора 1.66 Гц; поэтому уменьшения интервала
приобретения значительно уменьшается
в то время, когда, в некоторых случаях, могло быть совместимым
с целями контроля.
соответствующей частоте ротора 1.66 Гц; поэтому уменьшения интервала
приобретения значительно уменьшается
в то время, когда, в некоторых случаях, могло быть совместимым
с целями контроля.
Поиск катушки помещается
в конструкцию асинхронного двигателя.
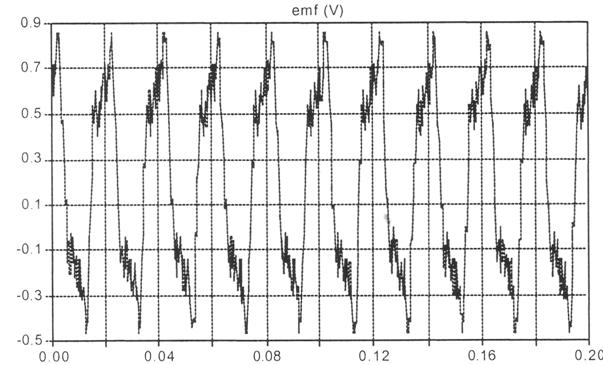
Рис. 1. Форма волны
индуцированной ЭДС с поиском катушки положить
на корпус асинхронного двигателя.
Тогда этот сигнал фильтруется
с помощью алгоритмов, основанных на дискретном преобразовании Фурье.
Операция по фильтрованию получена с
двумя восьмыми БИХ-фильтров. Первый - полосовой фильтр с частотой центра 50 Гц
и полосой пропускания 4 Гц, выход которого ЭДС компонента на частоте статора (ЭДС в
статоре компонент частоты). Второй - фильтр нижних частот с
переменной частотой среза от 1 Гц до 3 Гц; в испытании показан на следующем рисунке,
мы выбрали частоту среза 1 Гц. Выходной сигнал фильтра
нижних частот является компонент ЭДС в частоте ротора (ЭДС
в компоненте частоты ротора).
Задержка, введенная операцией по фильтрованию,
составляет приблизительно 0.5 с.
Испытания были проведены при различных значениях частоты скольжения в диапазоне от ![]() до
до ![]() с частотой дискретизации
800 Гц. Разработка для генерации новых
значений
с частотой дискретизации
800 Гц. Разработка для генерации новых
значений ![]() и
и ![]() на каждом итеративном шаге выполнена на окне данных около
1/4 цикла соответствующих
фильтрованных напряжений; эти значения
частоты дискретизации и размер окна данных, были
выбраны с целью чтобы увеличить
скорость сходимости и для повышения точности.
на каждом итеративном шаге выполнена на окне данных около
1/4 цикла соответствующих
фильтрованных напряжений; эти значения
частоты дискретизации и размер окна данных, были
выбраны с целью чтобы увеличить
скорость сходимости и для повышения точности.
Начальные значения параметров оцениваются
как упомянуто в предыдущем разделе,
и только шесть шагов итерации требуется, чтобы добраться до сходимости.
Предлагаемая система работает удовлетворительно при любом значении частоты скольжения в ранее упомянутом диапазоне и при любом положении поиске
катушки на расстоянии менее
При поиске катушки
на расстоянии
Таким образом, влияние на точность скольжения измерения других двигателей, используемых в наших испытаниях,
работающих на расстоянии более
4. ЗАКЛЮЧЕНИЕ
Был представлен новый цифровой подход
для точного измерения частоты скольжения асинхронных двигателей.
Не агрессивная процедура, основанная
на цифровом фильтровании и динамической оценке параметра, как показывали,
работала эффективно по почти широкому диапазону условий нагрузки и скорости.
Измерение частоты скольжения выполнено
без датчика скорости и выведено, используя магнитное поле в близости
асинхронного двигателя. Системный аппарат состоит из поиска катушки, платы АЦП
и ПС; измерительная система нуждается только в сигнале с поисковой катушкой (ЭДС), чтобы пропустить через цифровой
фильтр с помощью алгоритмов на
основе дискретного преобразования Фурье. Полезные оценки
частоты скольжения получены, используя около 1/4 цикла ЭДС
в статоре и роторе частоты. Частота дискретизации, размер окна
данных и характеристик фильтра
являются критическими параметрами, которые влияют не
эффективность алгоритма.
Точность измерения скольжения, в ранее
упомянутых диапазон частоты
скольжения, не зависит от нагрузки,
приложенной к двигателю, ни любых
последующих изменений в параметры
двигателя.
Кроме того, точность скольжения
оценка не чувствительны к положению поиск катушки,
если расстояние от асинхронного
двигателя составляет менее
Предлагаемый метод является
точным, простым и недорогим,
причем это позволяет измерение участка частоты скольжения
асинхронного двигателя даже в опасных средах, и она может быть надежно
применяться в идентификации параметра ротора в стационарных условиях и ходовых испытаний.
Экспериментальная проверка подтвердила справедливость предложенной процедуры.
Список источников
[1] Y.R. Kim, S.K.Sul,
[2]H. Kubota, K. Matsuse, T. Nakano: DSP-based
speed adaptive flux observer of induction motor, IEEE Trans. On Industry
Applications, Mar.-Apr. 1993, pp. 344-348.
[3] G. Yang, T.H. Chin: Adaptive-speed identification
scheme for a vector-controlled speed sensorless inverter-induction motor,
IEEE Trans. On Industry Applications, Jul.-Aug. 1993, pp. 820-825.
[4] M. Ishida, K. Iwata: A new slip frequqncy detector
of an induction motor utilizing rotor slots harmonics, IEEE Trans. On Industry
Applications, May-June 1984, pp. 575-582.
[5] K.D. Hurst, T.G. Habetler: A comparison of
spectrum estimation techniques for sensorless speed detection in induction
machines, IEEE Trans. On Industry Applications, vol. 33, n. 4, 1997.
[6] R. Beguenane, M.E.H. Benbouzid, G.A. Capolino:
On-line identification of induction motor rotor parameters from terminal
signals, Electromotion, vol.3, no.2, April-June 1996, pp. 51-57.