Имитационное моделирование дискретно-позиционной системы управления робота-манипулятора в Simulink
Автор: А. А. Махов
Источник: exponenta.ru
Автор: А. А. Махов
Источник: exponenta.ru
Технико-экономическая эффективность использования РТК в машиностроении прямо зависит от оптимальных структур РТК и нахождения рациональных областей их применения. Технико-экономические показателя РТК можно оценить одним из трех возможных способов:
Имитация - это численный метод проведения на вычислительных машинах с математическими моделями, описывающими поведение сложным систем в течение продолжительных периодов времени. Принципиальное отличие имитационного эксперимента от реального заключается в том, что в процессе имитации эксперимент проводится не с самой системой, а с ее моделью. Целесообразность применения имитационного моделирования роботов как в составе РТК, так и отдельно, определяется следующими причинами:
Далее рассматривается построением имитационной модели дискретно-позиционной системы управления робота.
Сущность дискретно-позиционного управления роботом, как было отмечено ранее, сводится к следующему:
Помимо указанных сигналов с системе существует и общий сигнал управление, отвечающий за включение робота. Общая схема-модель системы управления показана на рис. 1.
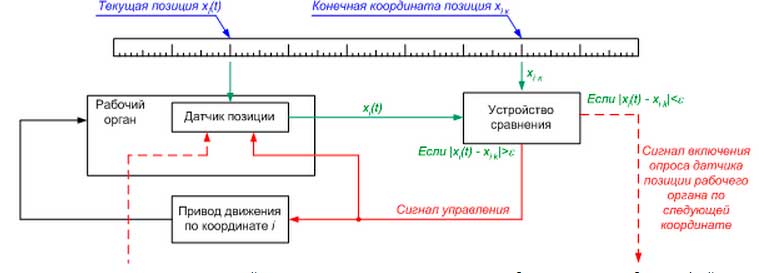
Pис. 1. — Схема-модель дискретно-позиционной системы управления движе-нием рабочего органа робота по i-ой степени свободы
Рассмотренную схему работы можно описать и математически. Тогда уравнения движений рабочего органа по 1-ой координате x1(t), и сигналов управления u1(t), и u1s(t) будут выглядеть следующим образом:
где t1, tj, tj-1 — значение дискретного времени в первый, текущий и предыдущий мо-менты соответственно;
Δt — период опроса датчика; u1(tj), u1s(tj) — значения управляющих сигналов внутри системы управления пер-вой степенью свободы и между 1-ой и s-ой, соответственно;
x1(t1), x1(tj-1), x1(tj) — положение рабочего органа робота в соответствующие моменты времени;
x10, x1k — начальное положение рабочего органа робота и терминальная точка позиционирования;
ε — точность измерения (точность сравнения);
k1 — скорость перемещения рабочего органа по 1-ой степени подвижности.
Первые уравнения описывают начальное состояние системы, а последующие — поведение системы во времени в зависимости о показаний позиционного датчика.
Система имитационного моделирования Simulink (версия 4.5) является компонентом интегрированной среды инженерных расчетов MatLab 6.5 компании The MathWorks.
Simulink сочетает в себе наглядность аналоговых машин и точность цифровых вычислительных машин. Simulink обеспечивает пользователю доступ ко всем возмож-ностям пакета MatLab, в том числе к большой библиотеке численных методов.
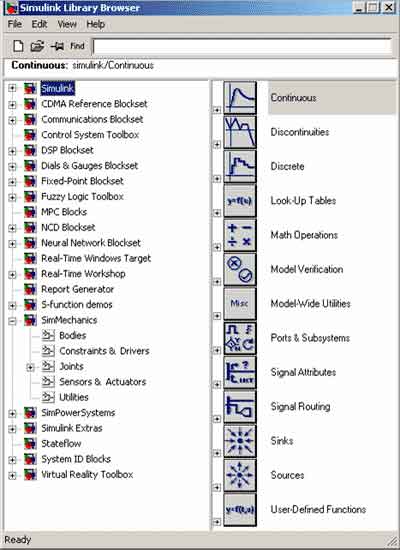
Рис. 2 — Дерево библиотек Simulink
При моделировании с использованием Simulink реализуется принцип визуального программирования1, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты.
На рис. 2 показано дерево стандартных библиотек системы Simulink, а также некоторые пакеты расширения.
Simulink обеспечивают интерактивную среду для моделирования, при этом поведение модели и результаты ее функционирования отображаются в процессе работы, и существует возможность изменять параметры модели даже в тот момент, когда она выполняется. Simulink позволяет создавать собственные блоки и библиотеки блоков с доступом из программ на MatLab, Fortran или C, связывать блоки с разработанными ранее программами на Fortran и C, содержащими уже проверенные модели.
Перед построением модели необходимо предварительно загрузить систему Matlab и запустить подсистему Simulink. В том и другом случае откроется окно Simulink Library Browser (система просмотра библиотек Simulink), изображённое на рис. 2. В верхней части этого окна две крайние левые кнопки служат, соответственно, для создания новой и открытия существующей модели. После нажатия левой кнопки на экране появится окно для построения новой модели (рис. 3,а).
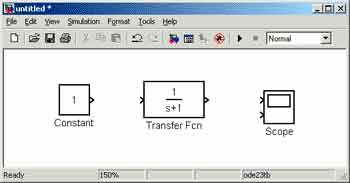
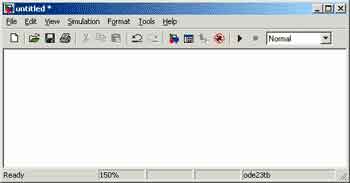
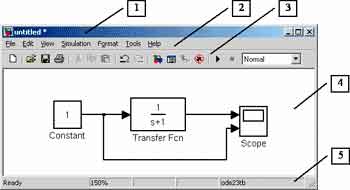
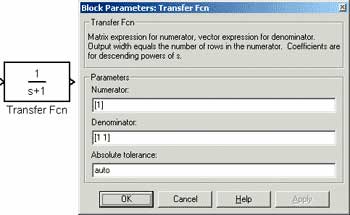
Рис. 3 — Рабочие окна подсистемы Simulink при создании модели
Процесс построения модели Simulink включает в себя компоновку модели и задание необходимых параметров. Компоновка заключается в выборе из библиотек Simulink необходимых блоков, их размещение в открывшемся окне (рис. 3,б) и соединение между собой (рис. 3,г). Далее для каждого блока устанавливаются соответствующие параметры (рис. 3,в), отвечающие требованиям моделируемой системы. Для того, чтобы построить модель Simulink, необходимо знать, какие типы блоков предоставляются пользователю.
Процедура поиска и перемещения блоков из библиотек Simulink в окно модели во многом напоминает операции копирования и перемещения файлов в среде Windows. Для этого в окне Simulink Library Browser необходимо выбрать пункт Simulink, затем выбрать соответствующий пункт в открывшемся списке библиотек и раскрыть его. Для перемещения курсор мышки устанавливается на нужный блок. Затем, нажав и удерживая левую клавишу мышки на нужном блоке, переместить его в окно модели. После того, как блок появился в окне построения модели, можно установить для него соответствующие параметры.
Для реализации функциональных зависимостей (1) и ряда вспомогательных функций потребуется ряд стандартных системных блоков.
Для повышения наглядности модели сложные функциональные зависимости целесообразно объединять в отдельные подсистемы (Subsystems). В результате можно добиться того, что имитационная модель системы управления будет иметь вид сходный циклограммой работы робота (см. далее).
Для создания механической системы робота воспользуемся пакетом расширения Simulink - SimMechanics.
В виду того, что в данной работе рассматривается только модель системы управления, подробное описание остальных систем робота не приводится.
Рассмотрим же более подробно порядок создания имитационной модели дискретно-позиционной системы управления робота.
Структура модели
Для повышения наглядности модели целесообразно выделить следующие составляющие компоненты системы управления:
Таким образом реализация модели представленной на рис. 1 и описываемую уравнениями 1, укрупнено можно представить в виде имитационной модели, показанной на рис. 4.
Рис. 4 — Укрупненная имитационная модель системы управления перемещением из точки start в точку finish по одной координате
Исходными параметрами данной модели являются:
На выходе подсистемы управления имеются три сигнала:
Рис. 5 — Временные зависимости φ(t) (вверху) и u(t) (внизу) - результаты моделирования
Результат моделирования работы системы управления поворотом руки робота из исходной позиции (φstart = 0) на угол 60° (φfinish = 60°) представлен на рис. 2.5.
Здесь вверху показана зависимость угла поворота руки робота φ(t), а внизу сигнал управления (включения) u(t) следующих перемещений рабочих органов робота.
Нетрудно заметить, что поворот руки робота осуществляется не непрерывно, а дискретно, причем вдоль линии K_fi · t, до ближайшей дискретной точки из диапазона [φfinish ± ε]. По достижении рабочим органом терминальной точки, сигнал управления следующими контурами меняется с 0 на +1.
Рассмотрим более подробно структуру подсистемы управления Subsystem (см. рис. 6).
Входные сигналы (кроме сигнала управления) объединяются мультиплексором и подаются на вход функциональной подсистемы анализа рассогласования текущей и терминальной координат. Сигнал управления же поступает на устройство сравнения, анализирующее включение или выключение процедуры опроса датчика и пр. Если сигнал равен +1, то работа передается следующей подсистеме. Если же сигнал равен нулю, то никаких изменений в системе не происходит.
Рис. 6 — Декомпозиция подсистемы управления
В подсистеме более низкого уровня входной общий канал разъединяется с помощью демультеплексора и значение текущей и терминальной координат подаются на вход сумматора, осуществляющего вычисление рассогласования двух величин. Если величина рассогласования превышает разрешающую способность системы (задаваемую как Error), то дальнейшее действие передается подсистеме нижнего уровня иерархии, если же - нет, то это означает что рабочий орган находится в терминальной точке, дальнейшее его перемещение не требуется, и поэтому вырабатывается внутренний сигнал управление на прекращение движение, а сигнал управления внешними контурами меняется 0 на +1.
В подсистеме нижнего уровня иерархии вырабатывается значение единичного перемещения рабочего органа (|Δx|=K·ΔT) в сторону уменьшения рассогласования сигналов, это значение передается в подсистему, стоящую выше по иерархии, где это значение добавляется к текущей координате рабочего органа (реализовано в виде положительно обратной связи).
Дополнительно в подсистеме нижнего уровня иерархии записывается текущее время работы подсистемы, в последствии оно будет свидетельствовать о времени окончании такта движения рабочего органа в терминальную точку.
Рис. 7 — Кинематическая схема манипулятора МП-9С.01: 1,2,3 — степени подвижности; 4 — схват
Таким образом, полный цикл работы робота может быть смоделирован последовательным соединением блоков - подсистем управления.
Продемонстрируем это на примере использования робота мод. МП-9С.01 (см. рис. 7) в качестве передаточного устройства. В этом случае робот служит для передачи заготовки (например вала) с одного конвейера на другой.
Цикл работы может быть описан следующим образом. Из исходной позиции рука робота поворачивается на 90° влево к первому передаточному устройству (конвейеру). Далее рука выдвигается, при этом заготовка попадает между схватов робота. Происходит захват заготовки и ее подъем (перемещение руки в вертикальном направлении). Далее рука поворачивается на 180° в противоположную сторону ко второму передаточному устройству (конвейеру). Рука опускает заготовку, после чего схваты разжимаются. Рука задвигается и поворачивается в исходное положение.
Тактовая циклограмма описанной работы представлена на рис. 8.
Рис. 9 — Имитационная модель системы управления роботом
Результаты моделирования имеют вид временной циклограммы работы, при этом по оси ординат откладывается значение координаты перемещения вдоль той или иной степени подвижности (см. рис. 10).

Рис. 10 — Результат моделирования системы управления
Для подтверждения объективности разработанной модели дополнительно в системе Simulink была полная имитационная модель робота, включающая помимо системы управление еще и механическую систему и устройство согласования сигналов (см. рис. 11).
Результат моделирования представляет собой анимационную картину цикла работы робота, фрагмент которой показан на рис. 12.
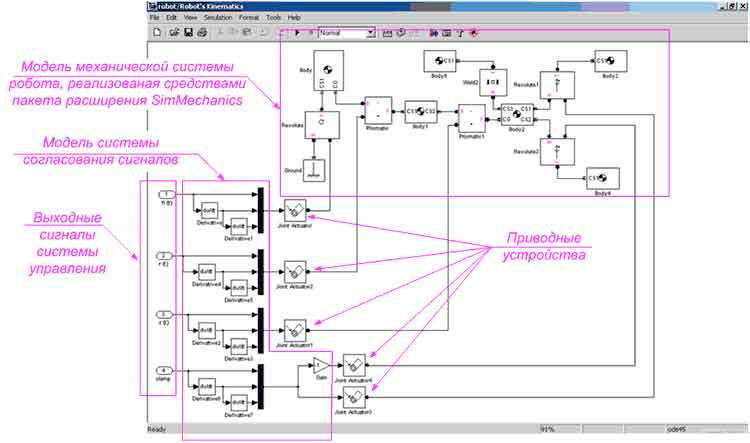
Рис. 11 — Дополнение имитационной модели механической системой и устройством согласования сигналов
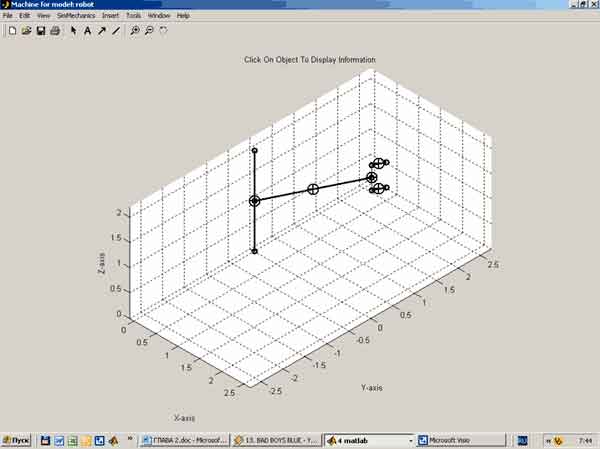
Рис. 12 — Фрагмент анимационной картины цикла работы робота